光纤组合导航系统的制作方法
1.本发明涉及惯性导航技术领域,尤其是涉及一种光纤组合导航系统。
背景技术:
2.光纤组合导航系统在飞机、舰船、导弹等很多军用场合得到广泛应用,属于导航级定位精度,当有卫星信号时,卫星接收机辅助光纤惯性导航系统提高姿态角精度、速度精度和位置精度,由于战场战争的复杂性,军用装备难以完全依靠卫星定位和地面导航装备完成导航工作,当卫星信号丢失时,光纤组合导航系统工作在纯惯性状态。
3.随着科技的发展,组合导航系统作为多种设备的导航部件,其轻量化的要求也越来越高,通常的组合导航系统由于内部部件种类多,现有的产品往往在结构设计上不是很紧凑,造成体积偏大,同时为了增强抗冲击振动能力,各个部分的壁厚都被加厚,造成产品重量偏大。另外,由于零部件较多,内部接线复杂,不易拆卸,造成维修困难,也使得产品的可靠性较差,因此需要一种同时考虑体积、重量、抗冲击振动能力,便于模块化制造和安装的光纤组合导航系统的制作方法。
技术实现要素:
4.本发明的目的在于提供一种光纤组合导航系统,旨在解决现有组合导航系统体积大,重量重,结构复杂的问题。
5.本发明提供一种光纤组合导航系统,包括:北斗双天线模块、三轴光纤陀螺、加速度计、导航计算机解算模块、电源模块、底座、上盖和外壳;所述三轴光纤陀螺固定在底座上,所述加速度计固定在所述三轴光纤陀螺内部,所述电源模块、导航计算机解算模块、北斗双天线模块固定在所述上盖内壁,所述电源模块与所述导航计算机解算模块连接为其供电,所述导航计算机解算模块连接所述北斗双天线模块,所述外壳连接所述底座和上盖,形成封闭空间;
6.所述北斗双天线模块用于实时测量载体航向角,所述三轴光纤陀螺用于实时测量载体的三轴角速度,所述加速度计用于实时测量载体的加速度,所述导航计算机解算模块用于通过上述测量得到的数据和导航算法最优方案进行姿态解算和导航算法解算,并将解算后的数据提供给载体。
7.采用本发明实施例,可以实现惯性导航、卫星导航和地面导航装备组合导航,且结构上采用模块化连接,可以在系统出现故障时通过更换相应的模块实现快速维修。
8.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
9.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体
实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
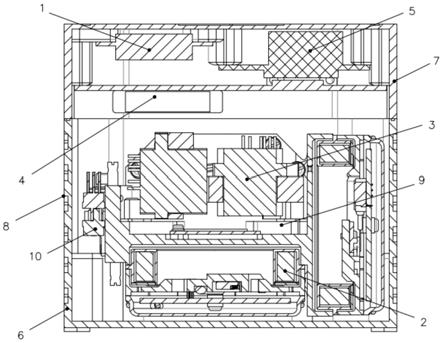
10.图1是本发明实施例的光纤组合导航系统结构示意图;
11.图2是本发明实施例的光纤组合导航系统除上盖、电源模块、导航计算机解算模块和北斗双天线模块的俯视图;
12.图3是本发明实施例的光纤组合导航系统除底座、三轴光纤陀螺、t型橡胶减震器、加速度计、加速度计底座的俯视图。
13.附图标记说明:
14.1:北斗双天线模块;2:三轴光纤陀螺;3:加速度计;4:导航计算机解算模块;5:电源模块;6:底座;7:上盖;8:外壳;9:加速度计底座;10:t型橡胶减震器;11:加速度计底座固定螺钉;12:三轴光纤陀螺固定螺钉;13:可快速拆卸连接器(1);14:可快速拆卸连接器(2);15:可快速拆卸连接器(3);16:北斗双天线连接器。
具体实施方式
15.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
16.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
17.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
18.实施例
19.根据本发明实施例,提供了一种光纤组合导航系统,图1是本发明实施例的光纤组合导航系统结构示意图,如图1所示,根据本发明实施例的光纤组合导航系统具体包括:北斗双天线模块1、三轴光纤陀螺2、加速度计3、导航计算机解算模块4、电源模块5、底座6、上盖7和外壳8;三轴光纤陀螺2固定在底座6上,加速度计3固定在三轴光纤陀螺2内部,电源模块5、导航计算机解算模块4、北斗双天线模块1采用固定螺钉固定在上盖7内壁,电源模块5与导航计算机解算模块4连接为其供电,导航计算机解算模块4连接北斗双天线模块1,外壳8连接底座6和上盖7,形成封闭空间;
20.北斗双天线模块1用于实时测量载体航向角,三轴光纤陀螺2用于实时测量载体的三轴角速度,加速度计3用于实时测量载体的加速度,导航计算机解算模块4用于通过上述测量得到的数据和导航算法最优方案进行姿态解算和导航算法解算,并将解算后的数据提供给载体。
21.图2为本发明实施例的光纤组合导航系统除上盖、电源模块、导航计算机解算模块和北斗双天线模块的俯视图,如图1和图2所示,系统包括三个加速度计3,采用一个加速度计底座9将三个加速度计3固定在三轴光纤陀螺2内部,加速度计底座9仅使用四颗加速度底座固定螺钉11进行固定;三轴光纤陀螺2由四个三轴光纤陀螺固定螺钉12固定在底座6,三轴光纤陀螺固定螺钉12位置做了加厚处理,三轴光纤陀螺2与底座6和三轴光纤陀螺固定螺钉12紧固面接触部位安装有t型橡胶减震器,降低载体冲击振动对数据输出的影响。
22.图3为本发明实施例的光纤组合导航系统除底座、三轴光纤陀螺、t型橡胶减震器、加速度计、加速度计底座的俯视图,如图3所示,加速度计3与导航计算机解算模块4和三轴光纤陀螺2与导航计算机解算模块4之间分别通过可快速拆卸连接器(1)13、可快速拆卸连接器(2)14连接,进行数据通信。
23.系统还包括对外连接器,对外连接器贯穿系统外壳8,包括一个可快速拆卸连接器(3)15和两个北斗天线连接器16,方便整体快速更换,由导航计算机解算模块4对其进行通信控制。
24.上述可快速拆卸连接器均采用卡簧式连接。
25.进一步地,为提高系统抗冲击振动能力,可以采用其他柔性材料制成的减震器来替代t型橡胶减震器,包括但不限于酚醛树脂类、聚氨酯类和高密度eva,也可以采用高精度减震弹簧、气压弹簧进行减震。
26.进一步地,可快速拆卸连接器可以采用圆形航插或其他异形快拆式连接器。
27.进一步地,北斗双天线模块也可采用美国全球定位系统(gps),俄罗斯格洛纳斯卫星导航系统(glonass)和欧盟伽利略定位系统(galileo)等其中一个或多个混合替代。
28.采用本发明实施例,可以实现惯性导航、卫星导航和地面导航装备组合导航,导航精度高;仅分别采用四颗固定螺钉固定加速度计和三轴光纤陀螺,且将加速度计固定在三轴光纤陀螺的内部,导航系统体积小,重量轻;采用减震器,大大降低了载体冲击振动对三轴光纤陀螺和加速度计模块数据输出的影响,增强了其抗冲击振动能力;模块间采用可快速拆卸连接器进行连接,可在系统出现故障时通过更换相应模块实现快速维修。
29.显然,本领域的技术人员应该明白,上述的本发明的各模块或各步骤可以用通用的计算装置来实现,它们可以集中在单个的计算装置上,或者分布在多个计算装置所组成的网络上,可选地,它们可以用计算装置可执行的程序代码来实现,从而,可以将它们存储在存储装置中由计算装置来执行,并且在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤,或者将它们分别制作成各个集成电路模块,或者将它们中的多个模块或步骤制作成单个集成电路模块来实现。这样,本发明不限制于任何特定的硬件和软件结合。
30.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术
方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1