集成电路芯片微纳尺度缺陷检测装置及方法
1.本发明属于精密测量领域,涉及到集成电路芯片微纳尺度缺陷检测装置和方法,适用于芯片缺陷的封装测试。
背景技术:
2.集成电路芯片是通过半导体工艺将一定数量的电子元件集成在一起的具有特定功能的电路。从发明至今,集成电路芯片几乎无处不在,现代计算、交流、制造、互联网和交通系统全都依赖于集成电路芯片的存在。但是,在集成电路芯片制造过程的每个环节中都可能造成缺陷,缺陷的存在会直接影响寿命和可靠性。因此,对集成电路芯片缺陷检测具有十分必要的计量意义。
3.目前,集成电路芯片缺陷检测用到的主要是机器视觉表面缺陷检测关键技术。现有的表面缺陷视觉检测系统,主要包括图像采集、缺陷图像分割、缺陷区域提取、缺陷特征、提取与降维、缺陷的识别与分类这五个模块。在图像采集时,需要高精度的测量系统,而传统的单一驱动方式的定位平台不能在大行程中同时做到高精度的要求,所以宏微双驱动技术是目前实现大行程、高精度运动控制的一种有效策略,高精度的位移传感器测量宏驱动部分的位移输出,微驱动部分的精度决定了整个系统的运动精度,从而在保证大范围运动行程的前提下实现了减小了整个系统的位移误差,得到的图像也更加精准。因此实现集成电路芯片缺陷检测系统显得尤为重要。
技术实现要素:
4.本发明针对现有技术的不足,提出了集成电路芯片微纳尺度缺陷检测装置和方法。
5.本发明集成电路芯片缺陷检测系统装置包括:宏微移动平台、显微成像捕捉机构、隔振平台;其中,宏微移动平台,显微成像捕捉机构依次固定安装在隔振地基上,使宏微移动平台和显微镜成像捕捉机构的运动方向互相平行;
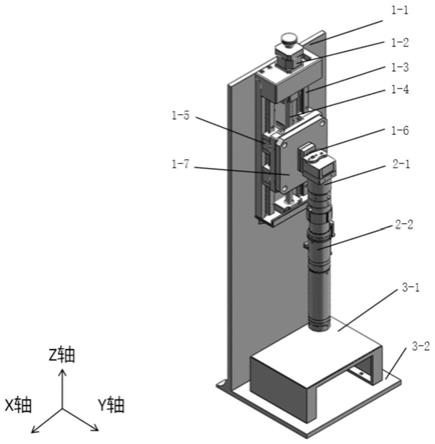
6.宏微移动平台包括:z轴安装侧板,z轴一号步进电机,z轴导轨,z轴滚轴丝杠,z轴光栅尺,z轴移动平台,z轴压电陶瓷驱动器;
7.z轴安装侧板垂直安装在隔振平台的一侧,z轴导轨竖直安装在z轴安装侧板上,z轴一号步进电机与z轴导轨固定连接,z轴滚轴丝杠与z轴导轨螺纹连接,z轴光栅尺与z轴导轨固定连接在另一侧,z轴压电陶瓷驱动器固定安装在z轴导轨上,用于测量微小移动的距离;z轴压电陶瓷驱动器与z轴导轨与沿z轴方向平行移动,共同实现宏微移动距离测量;
8.宏微移动平台用于测量z轴方向上的移动距离,其工作原理是:当启动z轴一号步进电机时,会通过z轴滚轴丝杠驱动z轴移动平台沿导轨垂直移动,安装在另一侧的z轴光栅尺测得移动的竖直距离,z轴压电陶瓷驱动器驱动显微成像机构的微小移动,从而测得精确位移。
9.显微成像捕捉机构包括:z轴ccd标定相机,z轴显微镜镜头;
10.z轴ccd标定相机垂直安装在z轴压电陶瓷驱动器上,z轴显微镜镜头与z轴ccd标定相机螺纹连接在同一方向上;显微成像捕捉机构沿z轴方向移动。
11.显微成像捕捉机构用于拍摄被测物体的像,其工作原理是:当启动z轴一号步进电机时,z轴移动平台沿导轨向z轴方向竖直移动,z轴压电陶瓷驱动器驱动ccd相机沿x轴,y轴,z轴进行微小移动调整,显微镜头与ccd相机移动方向相同,对被测物体进行全方位拍摄;
12.隔振平台包括:隔振地基,载物台;隔振地基安装在水平面上,载物台安装在隔振地基上端面,与显微成像捕捉机构在同一方向上。
13.本发明集成电路芯片微纳尺度缺陷检测方法,具体包括如下步骤:
14.s1:安装被测集成电路芯片,调整宏微移动平台的空间位置;
15.s2:利用步骤s1中的宏微移动平台,调整ccd相机与显微镜头组成的显微成像捕捉机构的相对位置,建立最佳成像位置模型;
16.s3:根据步骤s2中显微成像捕捉机构的显微测量结果,对集成芯片的图像进行处理,实现缺陷检测。
17.步骤s1中,调整宏微移动平台的空间位置:
18.将被测集成电路芯片正对显微镜头放在载物台上,宏微移动平台均处于z轴方向上;当启动z轴步进电机时,z轴移动平台将沿z轴方向直线运动;z轴移动平台移动一定距离后,压电陶瓷驱动器驱动ccd相机和显微镜头沿z轴进行微小移动,与被测集成电路芯片之间具有可拍摄距离,宏微移动平台的空间位置调整结束。
19.步骤s2中,建立最佳成像位置的动态模型:
20.将载物台上的被测集成电路芯片调整至可观察的视场范围q区域内,通过步进电机自动调整z轴移动平台沿z轴方向移动,通过压电陶瓷驱动器调节显微成像捕捉机构在z轴方向上的位置,其作用是:使得ccd相机与显微镜组成的显微视觉测量系统达到最佳成像位置。
21.利用ccd相机对被测集成电路芯片进行拍摄成像,求解当前清晰度x;当清晰度小于x0时,启动步进电机,并向被测集成电路芯片移动距离l1,l1满足如下公式:
22.l1=(x
‑
x0)/nd
23.n为步长参数,d为步进电机的步距;利用光栅尺实时检测步进电机的移动量l(t),当l(t)=l1时,步进电机停止;
24.利用ccd相机对被测集成电路芯片进行第二次拍摄,计算当前图像清晰度x,当清晰度小于x1时,启动压电陶瓷驱动器,并向被测集成电路芯片移动距离l2,l2满足如下公式:
25.l2=(x
‑
x1)/nd
26.n为步长参数,d为步进电机的步距;利用光栅尺实时检测压电陶瓷驱动器的移动量l(t),当l(t)=l2时,压电陶瓷驱动器停止;
27.根据储存的图像文件,调整芯片中不同缺陷位置在视场范围内,对芯片不同位置缺陷进行检测。
28.步骤s3中,根据显微测量所得结果,进行图像处理:
29.首先对ccd相机获取的彩色图像通过加权平均法进行灰度化处理:
30.gray(i,j)=0.299
×
r(i,j)+0.578
×
g(i,j)+0.144
×
b(i,j)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
31.将得到的灰度化图像进行二值化处理,然后利用霍夫变换检测erzh二值化图像中下边缘所在的直线,根据检测到的下边缘所在的直线检测上边缘所在的直线,最后计算出二值化图像的4个角所处的位置;进行边缘检测:
32.(1)图像的平滑处理:
[0033][0034]
对图像f(x,y)进行高斯平滑处理,得到处理后的图像g(x,y)如下:
[0035]
g(x,y)+h(x,y,σ)
×
f(x,y)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0036]
(2)建立图像梯度的幅值和方向模型:
[0037][0038]
(3)对梯度幅值进行非极大值抑制;
[0039]
(4)采用双阈值算法实现目标边缘检测和目标边缘连接;
[0040]
采用卷积神经网络产生图像特征图,选取卷积输出层的特征图;通过alexnet模型,在卷积输出层获取不同类型的特征图;通过对输入层进行卷积运算,得到多层卷积层响应;高卷积层对低卷积层特征图进行组合后,将低层特征图上无法分辨的非线性信息分离出来,从而区分图像像素信息,实现缺陷特征的提取。
[0041]
本发明集成电路芯片微纳尺度缺陷检测装置和方法,其有益效果是:能够对被测物体实现高精度纳米级宏微移动位移测量以及高清拍摄,利用z轴光栅尺测量宏微平台移动的位移,利用显微成像捕捉机构对被测物体进行全方位拍摄;利用集成电路芯片微纳尺度缺陷检测方法,实现对被测物的拍摄进而检测缺陷,基于上述集成电路芯片微纳尺度缺陷检测装置和方法能够实现对被测物缺陷的全面检测,满足精密测量领域的复杂需求。
附图说明
[0042]
图1为本发明的侧视图;
[0043]
图2为本发明的俯视图;
[0044]
图3为本发明的正视图;
[0045]
图4为本发明的右视图;
[0046]
其中:
[0047]1‑
1、z轴安装侧板,1
‑
2、z轴步进点击,1
‑
3、z轴光栅尺,1
‑
4、z轴滚轴丝杠,1
‑
5、z轴导轨,1
‑
6、z轴压电陶瓷驱动器,1
‑
7、z轴移动平台;
[0048]2‑
1、ccd标定相机,2
‑
2、显微镜头;
[0049]3‑
1、载物台,3
‑
2、隔振地基;
具体实施方式
[0050]
如图1、图2、图3和图4所示,本实施例提供集成电路芯片微纳尺度缺陷检测装置,具体包括:
[0051]
宏微移动平台、显微成像捕捉机构、隔振平台;其中,宏微移动平台,显微成像捕捉机构依次固定安装在隔振地基3
‑
2上,使宏微移动平台和显微镜成像捕捉机构的运动方向互相平行;
[0052]
宏微移动平台包括:z轴安装侧板1
‑
1、z轴一号步进电机1
‑
2、z轴导轨1
‑
5、z轴滚轴丝杠1
‑
4、z轴光栅尺1
‑
3、z轴移动平台1
‑
7、z轴压电陶瓷驱动器1
‑
6;
[0053]
z轴安装侧板1
‑
1垂直安装在隔振地基3
‑
2的一侧,z轴导轨1
‑
2竖直安装在z轴安装侧板上,z轴一号步进电机1
‑
2与z轴导轨1
‑
2固定连接,z轴滚轴丝杠1
‑
4与z轴导轨1
‑
5螺纹连接,z轴光栅尺1
‑
3与z轴导轨1
‑
5固定连接在另一侧,z轴压电陶瓷驱动器1
‑
6固定安装在z轴导轨1
‑
5上,用于测量微小移动的距离;z轴压电陶瓷驱动器1
‑
6与z轴导轨与沿z轴方向平行移动,共同实现宏微移动距离测量;
[0054]
宏微移动平台用于测量z轴方向上的移动距离,其工作原理是:当启动z轴一号步进电机1
‑
2时,会通过z轴滚轴丝杠1
‑
4驱动z轴移动平台1
‑
7沿导轨垂直移动,安装在另一侧的z轴光栅尺1
‑
3测得移动的竖直距离,z轴压电陶瓷驱动器1
‑
6驱动显微成像机构的微小移动,从而测得精确位移。
[0055]
显微成像捕捉机构包括:z轴ccd标定相机2
‑
1,z轴显微镜镜头2
‑
2;
[0056]
z轴ccd标定相机2
‑
1垂直安装在z轴压电陶瓷驱动器1
‑
6上,z轴显微镜镜头2
‑
2与z轴ccd标定相机2
‑
1螺纹连接在同一方向上;显微成像捕捉机构沿z轴方向移动。
[0057]
显微成像捕捉机构用于拍摄被测物体的像,其工作原理是:当启动z轴一号步进电机1
‑
2时,z轴移动平台1
‑
7沿导轨向z轴方向竖直移动,z轴压电陶瓷驱动器1
‑
6驱动ccd相机2
‑
1沿x轴,y轴,z轴进行微小移动调整,显微镜头2
‑
2与ccd相机2
‑
1移动方向相同,对被测物体进行全方位拍摄;
[0058]
隔振平台包括:隔振地基3
‑
2,载物台3
‑
1;隔振地基3
‑
2安装在水平面上,载物台3
‑
1安装在隔振地基3
‑
2上端面,与显微成像捕捉机构在同一方向上。
[0059]
本实施例还提供集成电路芯片微纳尺度缺陷检测方法,具体包括以下步骤:
[0060]
s1:安装被测集成电路芯片,调整宏微移动平台的空间位置;
[0061]
s2:利用步骤s1中的宏微移动平台,调整ccd相机2
‑
1与显微镜头2
‑
2组成的显微成像捕捉机构的相对位置,建立最佳成像位置模型;
[0062]
s3:根据步骤s2中显微成像捕捉机构的显微测量结果,对集成芯片的图像进行处理,实现缺陷检测。
[0063]
步骤s1中,调整宏微移动平台的空间位置:
[0064]
将被测集成电路芯片正对显微镜头2
‑
1放在载物台3
‑
1上,宏微移动平台1
‑
7均处于z轴方向上;当启动z轴步进电机1
‑
2时,z轴移动平台1
‑
7将沿z轴方向直线运动;z轴移动平台移动一定距离后,压电陶瓷驱动器1
‑
6驱动ccd相机2
‑
1和显微镜头2
‑
2沿z轴进行微小移动,与被测集成电路芯片之间具有可拍摄距离,宏微移动平台的空间位置调整结束;
[0065]
步骤s2中,建立最佳成像位置的动态模型:
[0066]
将载物台3
‑
1上的被测集成电路芯片调整至可观察的视场范围q区域内,通过步进电机1
‑
2自动调整z轴移动平台1
‑
7沿z轴方向移动,通过压电陶瓷驱动器1
‑
6调节显微成像捕捉机构在z轴方向上的位置,其作用是:使得ccd相机2
‑
1与显微镜头2
‑
2组成的显微视觉测量系统达到最佳成像位置。
[0067]
利用ccd相机2
‑
1对被测集成电路芯片进行拍摄成像,求解当前清晰度x;当清晰度小于x0时,启动步进电机,并向被测集成电路芯片移动距离l1,l1满足如下公式:
[0068]
l1=(x
‑
x0)/nd
[0069]
n为步长参数,d为步进电机的步距;利用光栅尺实时检测步进电机的移动量l(t),当l(t)=l1时,步进电机停止;
[0070]
利用ccd相机对被测集成电路芯片进行第二次拍摄,计算当前图像清晰度x,当清晰度小于x1时,启动压电陶瓷驱动器,并向被测集成电路芯片移动距离l2,l2满足如下公式:
[0071]
l2=(x
‑
x1)/nd
[0072]
n为步长参数,d为步进电机的步距;利用光栅尺实时检测压电陶瓷驱动器的移动量l(t),当l(t)=l2时,压电陶瓷驱动器停止;
[0073]
根据储存的图像文件,调整芯片中不同缺陷位置在视场范围内,进行对芯片不同位置缺陷的检测;
[0074]
步骤s3中,根据显微测量所得结果,进行图像处理:
[0075]
分首先对ccd相机2
‑
1获取的彩色图像通过加权平均法进行灰度化处理:
[0076]
gray(i,j)=0.299
×
r(i,j)+0.578
×
g(i,j)+0.144
×
b(i,j)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0077]
将得到的灰度化图像进行二值化处理,然后利用霍夫变换检测erzh二值化图像中下边缘所在的直线,根据检测到的下边缘所在的直线检测上边缘所在的直线,最后计算出二值化图像的4个角所处的位置;进行canny边缘检测:
[0078]
(1)图像的平滑处理:
[0079][0080]
对原图像法f(x,y)进行高斯平滑处理,得到处理后的图像g(x,y)如下:
[0081]
g(x,y)+h(x,y,σ)
×
f(x,y)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0082]
(2)建立梯度的幅值和方向模型:
[0083][0084]
(3)对梯度幅值进行非极大值抑制;
[0085]
(4)采用双阈值算法实现目标边缘的检测和目标边缘连接;
[0086]
采用卷积神经网络产生图像特征图,选取卷积输出层的特征图;通过alexnet模型,在卷积输出层获取不同类型的特征图;通过对输入层进行卷积运算,得到多层卷积层响应;高卷积层对低卷积层特征图进行组合后,将低层特征图上无法分辨的非线性信息分离出来,从而区分图像像素信息,实现缺陷特征的提取。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1