一种秸秆旋埋还田导航系统设计与试验方法
1.本发明属于导航系统的设计技术领域,具体涉及一种秸秆旋埋还田导航系统设计与试验方法。
背景技术:
2.秸秆还田是当今世界上普遍重视的一项培肥地力的增产措施,在杜绝了秸秆焚烧所造成的大气污染的同时还有增肥增产作用,秸秆还田能增加土壤有机质,改良土壤结构,使土壤疏松,孔隙度增加,容量减轻,促进微生物活力和作物根系的发育。秸秆还田增肥增产作用显著,一般可增产5%~10%,但若方法不当,也会导致土壤病菌增加,作物病害加重及缺苗(僵苗)等不良现象。因此采取合理的秸秆还田措施,才能起到良好的还田效果。
3.虽然针对农机自动导航控制策略国内外已有广泛研究,自动导航技术在农业生产中的应用也越来越广,但由于水田土壤较松软潮湿,且收获机作业后,残留稻茬和秸秆,导致水稻秸秆旋埋还田作业环境较为复杂,拖拉机容易出现滑移,导致导航系统内部的定位容易出现偏差,目前针对这一方向的自动导航研究还较少,因此提出一种秸秆旋埋还田导航系统已解决上述背景中提出的问题。
技术实现要素:
4.本发明要解决的技术问题是克服现有的缺陷,提供一种秸秆旋埋还田导航系统设计与试验方法,以解决上述背景技术中提出的由于水田土壤较松软潮湿,且收获机作业后,残留稻茬和秸秆,导致水稻秸秆旋埋还田作业环境较为复杂,拖拉机容易出现滑移,导致导航系统内部的定位容易出现偏差,目前针对这一方向的自动导航研究还较少的问题。
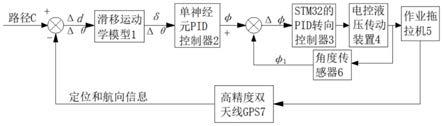
5.为实现上述目的,本发明提供如下技术方案:一种秸秆旋埋还田导航系统设计与试验方法,包括导航控制器和单神经元自适应pid控制器,所述导航控制器包括滑移运动学模型、单神经元pid控制器、stm32的pid转向控制器、电控液压传动装置、作业拖拉机、角度传感器和高精度双天线gps,所述滑移运动学模型的输出端和单神经元pid控制器的输入端之间相互电性连接,所述单神经元pid控制器的输出端和stm32的pid转向控制器的输入端之间相互电性连接,所述stm32的pid转向控制器的输出端和电控液压传动装置的输入端之间相互电性连接,所述电控液压传动装置的输出端分别和作业拖拉机、stm32的pid转向控制器的输入端之间相互电性连接,且所述电控液压传动装置的输出端通过角度传感器和stm32的pid转向控制器的输入端电性连接,所述作业拖拉机的输出端通过高精度双天线gps和滑移运动学模型的输入端之间相互电性连接。
6.优选的,所述单神经元自适应pid控制器包括转换器、调整权值、∑模块、 k模块和控制对象,所述转换器的输出端分别和调整权值、学习速率的输入端之间相互电性连接。
7.优选的,所述调整权值的输出端和∑模块的输入端之间相互电性连接,所述∑模块的输出端和k模块的输入端之间相互电性连接,所述k模块的输出端分别和控制对象、调整权值的输入端之间相互电性连接,且所述k模块通过 z-和调整权值的输入端相互电性连
接。
8.一种秸秆旋埋还田导航系统设计与试验方法,包括以下步骤:
9.步骤一:准备试验用的作业拖拉机;
10.步骤二:将车载计算机、电控液压传动装置、pid转向控制器、单神经元 pid控制器、角度传感器、高精度双天线gps定位器和接收器、秸秆旋埋还田作业机分别安装在作业拖拉机上,根据田间起始坐标与系统连接端口,初始化gps定位坐标原点和通讯端口,启动导航系统;
11.启动作业机具,开始路径跟踪导航作业,记录作业机具的实时转角、目标转角、滑移角和横向偏差等试验数据信息,由于秸秆旋埋还田作业机的动力来源为作业拖拉机,在旋埋作业时,拖拉机车身会倾斜摆动,使跟踪误差增大,因此,作业拖拉机车身倾斜导致gps获取的定位信息发生偏差,这里设其横向偏移距离为d1,实际横向偏差为δd,于是有如下几何关系:
[0012][0013]
式中,h为高精度gps接收器距离地表的高度,α为高精度gps接收器测量出的翻滚角度,d为基于定位信息的横向偏差,当翻滚角为0,即车身水平时,δd=d;
[0014]
步骤四:在不考虑车轮滑移的情况下,建立两轮车经典运动学路径跟踪模型,通过控制前轮转角δ来消除横向偏差δd,水稻秸秆旋埋还田作业中,受土壤松软潮湿、稻茬和残余秸秆的影响,作业机组会存在不同程度的滑移现象,此现象可以用前轮和后轮相对于目标行驶方向的滑移角和来表示;
[0015]
步骤五:拖拉机的实际横向偏差δd和航向角偏差δθ在作业过程中由于滑移现象导致发生偏移,在加入滑移角后,经典运动学路径跟踪模型转化为:
[0016][0017]
前轮滑移角βf p和后轮滑移角βr p无法直接由传感器测出,可由当前时刻和前一时刻的横向偏差δd和航向角偏差δθ解出,如下所示:
[0018][0019]
步骤六:将当前时刻的滑移偏差考虑到两轮车的经典运动学模型中,可得前一时刻滑移估计的运动学模型为:
[0020][0021]
式中充分考虑了水稻秸秆旋埋还田作业过程中复杂地表环境导致的滑移现象,可全面描述前轮滑移角对前轮转角δ的影响和后轮滑移角对航向角偏差δθ的影响,较为符合秸秆旋埋还田作业的运动状态,由于上述运动学模型中的两轮车滑移估计运动学模型中δ为前轮转角,而角度传感器实际检测的是拖拉机右前轮转角δ1,在实际转向控制中,应将δ换算为δ1,因此有:
[0022][0023]
式中,δ1为实际测量的右前轮的转角;
[0024]
步骤七:秸秆旋埋还田作业时,车载计算机利用高精度双天线gps获取的作业拖拉机的实时位置信息和航向角信息,计算出准确的目标路径的横线偏差和航向偏差,导航控制器基于滑移估计的运动学模型计算公式和所设计的转向角控制算法得出前轮转角δ,根据δ值和航向角偏差δθ的变化由变增益单神经元pid控制器学习优化后输出执行转角ф,基于stm32单片机的转向控制器将执行转角ф与角度传感器测得的当前转角ф1进行比较,得到实际需要的转角δф,处理后输出控制信号控制电磁阀打开阀口,液压油流入原系统
的转向油泵控制拖拉机执行转向操作,使作业机组跟踪目标路径;
[0025]
步骤八:由导航控制器基于滑移估计的运动学模型计算公式所知,前轮转角δ决定横向偏差δd和航向角偏差δθ的变化,作业拖拉机在田间作业时,通过在跟踪目标路径过程中不断调整前轮转角δ,减少实时的横向偏差和航向角偏差保证路径跟踪的准确性,经典运动学模型可以在没有任何近似的情况下被转换成线性方程,即三维链式系统,将导航控制器基于滑移估计的运动学模型计算公式代入三维链式系统可得到滑移链式系统如下所示:
[0026][0027]
式中,a1、a2、a3为链式系统的节点;m1,m2为链式系统节点间的关系链;
[0028]
步骤九:对作业拖拉机田间秸秆旋埋还田的运行路径进行记录,并和高精度双天线gps导航系统内记录的滑移运动路径进行比较,判断该方法的精度。
[0029]
优选的,所述步骤一中,试验用的作业拖拉机为东方红l954轮式拖拉机。
[0030]
优选的,所述步骤二中,高精度gps的接收器安装在作业拖拉机的车顶尾部位置,基线长度设为r,且r=1.38m,电控液压传动装置安装于车头的横梁上,以用于控制作业拖拉机的转向,角度传感器安装于作业拖拉机的右前轮处,高精度双天线gps的定位器安装于驾驶室内,秸秆旋埋还田作业机通过三点悬挂方式安装于拖拉机尾部。
[0031]
优选的,所述步骤七中,导航控制器的总体结构示意图如图1所示。
[0032]
优选的,所述步骤八中,为了提高路径跟踪精度,加入上一时刻的滑移角和通过滑移链式系统反演可得到最终要实施的非线性控制定律,估算出前轮转角δ,估算方式如下所示:
[0033][0034]
优选的,由所述估算方式可知,该系统的性能由跟踪的横向偏差δd决定,与速度v无关。系统控制中,位置信息可以直接由高精度双天线gps提供,横向偏差δd为当前位置与目标路径的距离,航向角偏差δθ为高精度双天线gps 获取的航向角与目标航向角的差值,通过上述式中系数k1和k2的值来调整系统的性能。
[0035]
优选的,所述步骤九中,将作业拖拉机田间秸秆旋埋还田的运行路径和高精度双天线gps导航系统内记录的滑移运动路径绘制成曲线图,比较二者曲线图的差别判断该方法的导航精度。
[0036]
与现有技术相比,本发明提供了一种秸秆旋埋还田导航系统设计与试验方法,具备以下有益效果:
[0037]
1、本发明通过设置的高精度双天线gps,秸秆旋埋还田作业时,车载计算机利用高精度双天线gps实时位置信息和航向角信息,并计算相对于目标路径的横向偏差和航向角偏差,从而使作业拖拉机的转向角度更加精确,保证了作业拖拉机在田中转向角度的准确性,避免因为作业拖拉机的转向角度不精确造成的导航系统定位不准确的问题;
[0038]
2、本发明通过设置的经典运动学路径跟踪模型计算公式、横向偏差角度计算公式和航向偏差角度计算公式,可以得到作业拖拉机前一时刻滑移估计的运动学模型,充分考虑了水稻秸秆旋埋还田作业过程中复杂地表环境导致的滑移现象,可全面描述前轮滑移角对前轮转角的影响和后轮滑移角对航向角偏差的影响,复合秸秆旋埋还田作业的实际运动状态,且有效的避免了由于水田土壤较松软潮湿,且收获机作业后,残留稻茬和秸秆,导致水稻秸秆旋埋还田作业环境较为复杂,拖拉机容易出现滑移,导致导航系统内部的定位容易出现偏差,目前针对这一方向的自动导航研究还较少的问题;
[0039]
3、本发明通过以高精度双天线gps定位系统和角度传感器为作业状态采集装置,通过变增益单神经元pid算法控制作业机具进行跟踪路径,并与常规 pid和单神经元pid算法进行对比,改善了单神经元调节比例系数k固定的局限,提高了控制器响应速度且降低了超调量,增强了导航系统对旋埋还田作业环境的自适应性,降低了秸秆旋埋还田作业环境对跟踪精度的影响,增强了导航系统对作业环境的适应性和鲁棒性,有效提高了秸秆旋埋还田作业的路径跟踪精度,适用于未来无人驾驶下的秸秆旋埋还田作业。
附图说明
[0040]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:
[0041]
图1为本发明提出的秸秆旋埋还田导航系统设计与试验方法中导航控制器的总体结构示意图;
[0042]
图2为本发明提出的秸秆旋埋还田导航系统设计与试验方法中单神经元自适应pid控制器自适应控制结构示意图;
[0043]
图中:1、滑移运动学模型;2、单神经元pid控制器;3、stm32的pid 转向控制器;4、电控液压传动装置;5、作业拖拉机;6、角度传感器;7、高精度双天线gps;8、转换器;9、调整权值;10、∑模块;11、k模块;12、控制对象。
具体实施方式
[0044]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0045]
请参阅图1-2,本发明提供一种技术方案:一种秸秆旋埋还田导航系统设计与试验方法,包括导航控制器和单神经元自适应pid控制器,导航控制器包括滑移运动学模型1、单神经元pid控制器2、stm32的pid转向控制器3、电控液压传动装置4、作业拖拉机5、角度传感器6和高精度双天线gps7,滑移运动学模型1的输出端和单神经元pid控制器2的输入端之间相互电性连接,单神经元pid控制器2的输出端和stm32的pid转向控制器3的输入端之间相互电性连接,stm32的pid转向控制器3的输出端和电控液压传动装置 4的输入端之间相互电性连接,电控液压传动装置4的输出端分别和作业拖拉机5、stm32的pid转向控制器3的输入端之间相互电性连接,且电控液压传动装置4的输出端通过角度传感器6和stm32的pid转向控制器3的输入端电性连接,作业拖拉机5的输出端通过高精度双天线gps7和滑移运动学模型 1的输入端之间相互电性连接,本发明通过设置的高精度双天线gps7,秸秆旋埋还田作业时,车载计算机利用高精度双天线gps7实时位置信息和航向角信息,并计算相对于目标路径的横向偏差和航向角偏差,从而使作业拖拉机的转向角度更加精确,保证了作业拖拉机在田中转向角度的准确性,避免因为作业拖拉机的转向角度不精确造成的导航系统定位不准确的问题。
[0046]
本发明中,优选的,单神经元自适应pid控制器包括转换器8、调整权值 9、∑模块10、k模块11和控制对象12,转换器8的输出端分别和调整权值9、学习速率的输入端之间相互电性连接。
[0047]
本发明中,优选的,调整权值9的输出端和∑模块10的输入端之间相互电性连接,∑模块10的输出端和k模块11的输入端之间相互电性连接,k模块11的输出端分别和控制对象12、调整权值9的输入端之间相互电性连接,且k模块11通过z-1和调整权值9的输入端相互电性连接。
[0048]
一种秸秆旋埋还田导航系统设计与试验方法,包括以下步骤:
[0049]
步骤一:准备试验用的作业拖拉机;
[0050]
步骤二:将车载计算机、电控液压传动装置、pid转向控制器、单神经元 pid控制器、角度传感器、高精度双天线gps定位器和接收器、秸秆旋埋还田作业机分别安装在作业拖拉机上,根据田间起始坐标与系统连接端口,初始化gps定位坐标原点和通讯端口,启动导航系统;
[0051]
启动作业机具,开始路径跟踪导航作业,记录作业机具的实时转角、目标转角、滑移角和横向偏差等试验数据信息,由于秸秆旋埋还田作业机的动力来源为作业拖拉机,在旋埋作业时,拖拉机车身会倾斜摆动,使跟踪误差增大,因此,作业拖拉机车身倾斜导致gps获取的定位信息发生偏差,这里设其横向偏移距离为d1,实际横向偏差为δd,于是有如下几何关系:
[0052][0053]
式中,h为高精度gps接收器距离地表的高度,α为高精度gps接收器测量出的翻滚角度,d为基于定位信息的横向偏差,当翻滚角为0,即车身水平时,δd=d;
[0054]
步骤四:在不考虑车轮滑移的情况下,建立两轮车经典运动学路径跟踪模型,通过控制前轮转角δ来消除横向偏差δd,水稻秸秆旋埋还田作业中,受土壤松软潮湿、稻茬和残余秸秆的影响,作业机组会存在不同程度的滑移现象,此现象可以用前轮和后轮相对于目标行驶方向的滑移角和来表示;
[0055]
步骤五:拖拉机的实际横向偏差δd和航向角偏差δθ在作业过程中由于滑移现象导致发生偏移,在加入滑移角后,经典运动学路径跟踪模型转化为:
[0056][0057]
前轮滑移角βf p和后轮滑移角βr p无法直接由传感器测出,可由当前时刻和前一时刻的横向偏差δd和航向角偏差δθ解出,如下所示:
[0058][0059]
步骤六:将当前时刻的滑移偏差考虑到两轮车的经典运动学模型中,可得前一时刻滑移估计的运动学模型为:
[0060][0061]
式中充分考虑了水稻秸秆旋埋还田作业过程中复杂地表环境导致的滑移现象,可全面描述前轮滑移角对前轮转角δ的影响和后轮滑移角对航向角偏差δθ的影响,较为符合秸秆旋埋还田作业的运动状态,由于上述运动学模型中的两轮车滑移估计运动学模
型中δ为前轮转角,而角度传感器实际检测的是拖拉机右前轮转角δ1,在实际转向控制中,应将δ换算为δ1,因此有:
[0062][0063]
式中,δ1为实际测量的右前轮的转角;
[0064]
步骤七:秸秆旋埋还田作业时,车载计算机利用高精度双天线gps获取的作业拖拉机的实时位置信息和航向角信息,计算出准确的目标路径的横线偏差和航向偏差,导航控制器基于滑移估计的运动学模型计算公式和所设计的转向角控制算法得出前轮转角δ,根据δ值和航向角偏差δθ的变化由变增益单神经元pid控制器学习优化后输出执行转角ф,基于stm32单片机的转向控制器将执行转角ф与角度传感器测得的当前转角ф1进行比较,得到实际需要的转角δф,处理后输出控制信号控制电磁阀打开阀口,液压油流入原系统的转向油泵控制拖拉机执行转向操作,使作业机组跟踪目标路径;
[0065]
步骤八:由导航控制器基于滑移估计的运动学模型计算公式所知,前轮转角δ决定横向偏差δd和航向角偏差δθ的变化,作业拖拉机在田间作业时,通过在跟踪目标路径过程中不断调整前轮转角δ,减少实时的横向偏差和航向角偏差保证路径跟踪的准确性,经典运动学模型可以在没有任何近似的情况下被转换成线性方程,即三维链式系统,将导航控制器基于滑移估计的运动学模型计算公式代入三维链式系统可得到滑移链式系统如下所示:
[0066][0067]
式中,a1、a2、a3为链式系统的节点;m1,m2为链式系统节点间的关系链;
[0068]
步骤九:对作业拖拉机田间秸秆旋埋还田的运行路径进行记录,并和高精度双天线gps导航系统内记录的滑移运动路径进行比较,判断该方法的精度。
[0069]
本发明中,优选的,步骤一中,试验用的作业拖拉机为东方红l954轮式拖拉机。
[0070]
本发明中,优选的,步骤二中,高精度gps的接收器安装在作业拖拉机的车顶尾部位置,基线长度设为r,且r=1.38m,电控液压传动装置安装于车头的横梁上,以用于控制作业拖拉机的转向,角度传感器安装于作业拖拉机的右前轮处,高精度双天线gps的定位器安装于驾驶室内,秸秆旋埋还田作业机通过三点悬挂方式安装于拖拉机尾部。
[0071]
本发明中,优选的,步骤七中,导航控制器的总体结构示意图如图1所示。
[0072]
本发明中,优选的,步骤八中,为了提高路径跟踪精度,加入上一时刻的滑移角和通过滑移链式系统反演可得到最终要实施的非线性控制定律,估算出前轮转角δ,估
算方式如下所示:
[0073][0074]
本发明中,优选的,由所述估算方式可知,该系统的性能由跟踪的横向偏差δd决定,与速度v无关。系统控制中,位置信息可以直接由高精度双天线gps提供,横向偏差δd为当前位置与目标路径的距离,航向角偏差δθ为高精度双天线gps获取的航向角与目标航向角的差值,通过上述式中系数k1和 k2的值来调整系统的性能。
[0075]
本发明中,优选的,步骤九中,将作业拖拉机田间秸秆旋埋还田的运行路径和高精度双天线gps导航系统内记录的滑移运动路径绘制成曲线图,比较二者曲线图的差别判断该方法的导航精度。
[0076]
综上所述,以高精度双天线gps定位系统和角度传感器为作业状态采集装置,通过变增益单神经元pid算法控制作业机具进行跟踪路径,并与常规pid 和单神经元pid算法进行对比,改善了单神经元调节比例系数k固定的局限,提高了控制器响应速度且降低了超调量,增强了导航系统对旋埋还田作业环境的自适应性,降低了秸秆旋埋还田作业环境对跟踪精度的影响,增强了导航系统对作业环境的适应性和鲁棒性,有效提高了秸秆旋埋还田作业的路径跟踪精度,适用于未来无人驾驶下的秸秆旋埋还田作业。
[0077]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1