一种单频逆构多普勒频移的RTK毫米级实时精密定位方法
一种单频逆构多普勒频移的rtk毫米级实时精密定位方法
技术领域
1.本发明涉及通信领域,尤其涉及一种单频逆构多普勒频移的rtk毫米级实时精密定位方法。
背景技术:
2.rtk(real time kinematic)定位是基于载波相位观测值实时差分的gnss定位技术,它的出现在gnss导航技术发展史上具有重要突破性。然而在实际定位环境中rtk定位技术的精度往往受到观测冗余度低、信号中断失锁、周跳、粗差等gnss信号异常问题的限制。这是由于现有卫星播发的数据在传输过程中精度不高,从而使地面从接收机接收到的多普勒值不准,从而使检测的周跳具有很大误差,常规的避免误差的方法是在接收机上加装专门用来测量多普勒值的数据模块,再传输至地面,这会增加运算的复杂程度,计算量大,计算时间长。这些因素主要影响载波相位观测量,当接收机在两旁存在树木、建筑等遮挡物的道路环境下,这种影响会更加强烈,增加整周模糊度的固定难度。
技术实现要素:
3.本发明所解决的技术问题是,针对现有技术的不足,提供一种单频逆构多普勒频移的rtk毫米级实时精密定位方法,不受定位环境影响。
4.为了实现上述目的,本发明提供一种单频逆构多普勒频移的rtk毫米级实时精密定位方法,是通过基站和流动站速度,实时逆构多普勒频移值d(t);从而计算载波相位值φ
t
;再根据逆构多普勒和载波相位值φ
t
计算流动站接收机坐标;包括如下步骤:
5.步骤a)实时获取基站和流动站测距码值,并通过速度计模块测量流动站速度,实时逆构多普勒;
6.步骤b)通过步骤a)所得逆构多普勒频移值d(t)计算载波相位值φ
t
;
7.步骤c)采用互差加权法计算观测方程得出流动站接收机坐标。
8.优选地,步骤a)通过公式(1)计算逆构多普勒频移值d(t):
[0009][0010]
其中,v是由速度计模块测量的流动站接收机速度,vs是流动站接收机进行定位过程中所观测到的卫星的速度,卫星的位置和速度是通过接收机接收到的卫星所播发的星历参数计算得出,可以看作为已知量,l是单位观测向量,即接收机和卫星之间的方向余弦矢量,可以直接通过卫星和接收机的三维位置坐标计算得出,λ是信号波长,λ=c/b1,c为光速,b1为信号频率。
[0011]
更优选地,还可以对逆构多普勒频移值d(t)进行去噪,得逆构多普勒频移拟合值d
′
(t):
[0012]d′
(t)=a0+a1(t-t0)+a2(t-t0)2+a3(t-t0)2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0013]
式中,拟合系数a0,a1,a2,a3通过计算机对d(t)进行最小二乘法拟合计算而得。
[0014]
优选地,步骤b)通过公式(3)或公式(3’)计算载波相位值φ
t
:
[0015][0016][0017]
其中,φ
t
为t历元时刻的载波相位值,t表示历元时刻,历元时刻是接收机接收到数据的时刻,通常以gnss的时间系统表示,即周和周内秒,与年月日时分秒可以相互转换,d(t)为逆构多普勒频移值,d
′
(t)为逆构多普勒频移拟合值,单位是hz,n
t
为载波相位值的整周模糊度,可通过lambda法解出。
[0018]
优选地,步骤c)可基于仰角对互差加权法进行校准,即先计算可视卫星与接收机相对位移的距离变化量s
t-1
:
[0019][0020]
其中,δt是历元间隔,φ0是接收机某时段记录的无异常载波相位观测数据,代表星间单差和站间单差的双差算子,下标t表示历元(时刻),例如t+1为历元t的下一个历元;为初始载波相位,s
t
表示t时刻的可视卫星与接收机相对位移的距离变化量。
[0021]
更优选地,双差载波相位更优选地,双差载波相位
[0022]
更优选地,通过现有技术双差观测方程的y=hx矩阵形式为解算接收机位置坐标的方程,解得接收机坐标。
[0023]
有益效果:
[0024]
针对复杂环境下整周模糊度固定困难的问题,在单历元内定位的情况下,基于多普勒频移逆构的gnss定位算法解决了gnss信号异常问题并保持较高的整周模糊度正确估计率。通过多普勒逆构方法计算载波相位,相比于接收机观测载波相位,无需考虑一系列信号异常问题,计算载波相位质量较高,能准确搜索模糊度,再结合基于仰角选择的互差加权法(根据仰角信息确定权系数),筛选有问题的卫星信号(选择视角好的信号),从而能进行流动站的精确定位,保证在单历元内整周模糊度解出以及正确率。
[0025]
发明人发现,多普勒频移数据作用广泛,它能用于伪距平滑和周跳探测,载波相位观测值是接收机的锁相环跟踪gnss信号测量得到的;多普勒频移观测值与载波相位观测值两者强相关,因此两者都受到定位环境影响。逆构多普勒频移值相比多普勒频移观测值具有更好、更精确反映载波相位观测值的变化量的优势,且基本不受定位环境影响。
[0026]
本发明通过多普勒逆构方法解决gnss信号异常问题(即通过逆构的方法将接受到的误差极大的观测值还原为接收机发出的原始数据信号),再配合基于仰角选择的互差加权法,在不能接收高质量gnss信号的道路定位环境下可快速解出整周模糊度,确保较高的整周模糊度正确估计率,提高传统单历元定位算法性能。
附图说明
[0027]
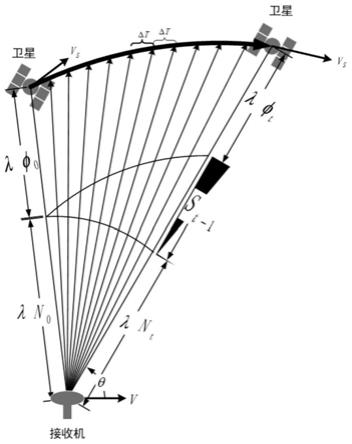
图1为本发明实施例提供的单频逆构多普勒频移的rtk毫米级实时精密定位方法建立载波相位计算模型图。
具体实施方式
[0028]
以下结合附图和具体实施方式对本发明进行进一步具体说明。
[0029]
实施例1:
[0030]
将基站和流动站的接收机之间的相对定位设置为实时模式,在实时模式下,流动站的接收机可以通过安装速度计模块进行测速以逆构多普勒频移信息,一般而言,速度计模块测速是全天候的,除非速度计模块中的惯性元器件故障,否则不会无故受环境影响而中断测速。
[0031]
本发明提供的定位方法具体步骤如下:
[0032]
(1)实时获取基站和流动站测距码值,并通过速度计模块测量流动站速度;
[0033]
(2)通过流动站的测速信息实时逆构多普勒,即通过公式(1)计算逆构多普勒频移值d(t):
[0034][0035]
其中,v是由速度计模块测量的流动站接收机速度,vs是流动站接收机进行定位过程中所观测到的卫星的速度,卫星的位置和速度是通过接收机接收到的卫星所播发的星历参数计算得出,可以看作为已知量,l是单位观测向量,即接收机和卫星之间的方向余弦矢量,可以直接通过卫星和接收机的三维位置坐标计算得出,λ是信号波长,λ=c/b1,c为光速,b1为信号频率。
[0036]
(3)通过最小二乘拟合法拟合多普勒逆构值,得拟合系数a0,a1,a2,a3,上述拟合系数组合计算得逆构多普勒频移拟合值d
′
(t):
[0037]d′
(t)=a0+a1(t-t0)+a2(t-t0)2+a3(t-t0)2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0038]
式中,拟合系数a0,a1,a2,a3通过计算机计算而得。
[0039]
(4)通过逆构多普勒频移值d(t)或逆构多普勒频移拟合值d
′
(t)计算载波相位值φ
t
:
[0040][0041][0042]
其中,φ
t
为t历元时刻的载波相位值,t表示历元时刻,历元时刻是接收机接收到数据的时刻,通常以gnss的时间系统表示,即周和周内秒,与年月日时分秒可以相互转换,d(t)为逆构多普勒频移值,d
′
(t)为逆构多普勒频移拟合值(比逆构多普勒频移值精度更高),单位是hz,n
t
为载波相位值的整周模糊度,可通过lambda法(依据协方差矩阵搜索宽巷,再将宽巷整周模糊度还原成l1单频载波相位的整周模糊度)解出,为现有技术,在此不做展开说明。
[0043]
(5)采用互差加权法计算观测方程得出流动站接收机坐标:
[0044]
如图1所示,为本发明提供的单频逆构多普勒频移的rtk毫米级实时精密定位方法建立载波相位计算模型图,其简单描述了采用多普勒逆构方法对流动站接收机进行定位的过程。
[0045]
设上述图1所示的模型中,卫星位置、卫星速度和接收机速度等三维向量全部处于地心地固坐标系框架内,忽略地球自转影响,通过式(1)求得多普勒逆构值,图1中的s为接收机的距离变化量,δt是历元间隔,φ0是接收机某时段记录的无异常载波相位观测数据,全部为已知量。
[0046]
则可视卫星与接收机相对位移的距离变化量s
t-1
为:
[0047][0048]
且双差载波相位
[0049]
其中,代表星间单差和站间单差的双差算子,下标t表示历元(时刻),例如t+1为历元t的下一个历元;为初始载波相位,s
t
表示t时刻的可视卫星与接收机相对位移的距离变化量。
[0050]
再通过现有技术双差观测方程的y=hx矩阵形式为解算接收机位置坐标的方程,解得接收机坐标:
[0051][0052]
其中,β为双差载波相位值与几何距离之差,α为步骤(1)所得测距码双差值与几何距离之差,n是单历元可视卫星个数,b为泰勒级数展开的n
×
3线性系数矩阵,i为n
×
n单位矩阵,x为坐标向量,n为模糊度向量。
[0053]
在宽巷双差载波相位得到之后采用仰角选择的互差加权法估计流动站的整周模糊度和坐标:向量β=[β
1 β2ꢀ…ꢀ
βn]和α=[α
1 α2ꢀ…ꢀ
αn]所对应的接收机与可视卫星间仰角的向量为γ=[γ
1 γ2ꢀ…ꢀ
γn],从中选出最小仰角γ
min
≤[γ
1 γ2ꢀ…ꢀ
γn]以及对应的元素位置(std),对应最小仰角的卫星,选出β
std
=β(std)和α
std
=α(std)作为互差标准量。选择最小仰角的卫星的α
std
作为互差标准量。
[0054]
互差加权矩阵:
[0055][0056]
其中,
[0057][0058]
加权最小二乘:
[0059][0060]
其中,τ为设置的阈值,δx为坐标改变量,当几何变化距离‖δx‖小于阈值时,停止式迭代,解出接收机坐标加权矩阵w在迭代中随着接收机坐标的更新而更新,该加权矩
阵能极大减少可能产生异常问题的测距码观测量的影响,帮助接收机在gnss信号受遮挡物影响的环境下顺利完成整周模糊度固定并保持正确率。
[0061]
实验验证
[0062]
由于传统单历元定位方法是用rtklib软件算法进行定位,新单历元定位方法是利用matlab仿真的基于多普勒逆构的gnss定位算法;实验给出基于多普勒频移逆构的gnss定位算法的新单历元定位精度,并给出单靠接收gnss卫星系统发送的观测信号进行定位的传统单历元rtk定位精度作为对照,对比验证基于多普勒逆构的gnss定位算法是否提升传统单历元定位的定位性能。
[0063]
具体地,取两种单历元定位在东北天坐标系下一个小时的定位精度的rms值、均值、标准差、最小值、最大值、模糊度固定率,得到的精度统计如表1所示:
[0064]
表1
[0065][0066][0067]
由上可知,本发明与现有技术相比,精确率提高至100%,即通过多普勒逆构方法获取载波相位信息,可避免gnss信号因为道路旁树木、建筑遮挡而产生异常问题,再结合基于仰角选择的互差加权策略,保证有问题的测距码信息在定位解算中权重最低。实验结果表明,相较于传统无仰角选择加权、无多普勒逆构的单历元定位算法,本方法提高了模糊度固定率、定位精度,在不能接收高质量gnss信号的特殊道路情况下优势更为明显。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1