一种电磁线圈开短路检测电路的制作方法
1.本发明属于飞机刹车技术领域,具体涉及一种开短路检测电路。
背景技术:
2.现有技术的飞机数字电传防滑刹车系统由刹车指令传感器、防滑刹车控制盒、机轮速度传感器、电液压力伺服阀和电磁液压锁组成,承担飞机起降过程必须的防滑刹车功能。
3.按照gjb2879a飞机机轮防滑刹车控制系统通用规范中3.11人机工程中关于机内检测装置要求:系统自检测不应影响系统的正常功能,机内检测应能提供光或声的故障指示信息。飞机防滑刹车系统自检测功能是必须具备的,目前数字电传防滑刹车系统中开短路故障检测电路采用刹车指令传感器、机轮速度传感器和电液压力伺服阀三种附件产品。
4.公告号为cn110562223a的发明创造,该发明创造利用rc充电时间短,不影响系统的快速反应能力;同时该rc放电电路的放电时间长,能够屏蔽由于振动、电磁干扰、噪声和温度变化造成基准速度跳变而导致静刹车保护的情况;使飞机在静刹车状态时,能够抵抗振动、电磁干扰,噪声和温度变化等干扰信号的干扰,提高了静刹车的稳定性和飞机的安全性;但是,该电路仅用于飞机静刹车保护功能,不能用于飞机电液压力伺服阀、机轮速度传感器的故障检测。
技术实现要素:
5.为了克服现有技术的不足,本发明提供了一种电磁线圈开短路检测电路,包括第一双运算放大器u
3a
、第二双运算放大器u
3b
、第一电阻r1到第十三电阻r
13
、第一二极管d1到第四二极管d4、第一三极管u1、第二三极管u2、第二电容c2和第三电容c3;分为开路故障检测电路、短路故障检测电路和故障指示电路三部分;彻底解决由于外部信号干扰或连接器接触不可靠导致开短路故障检测电路输出“虚警率高”的问题。降低了刹车系统故障率90%,延长了刹车系统在外场使用的合格周期,提高了经济效益,提高了产品在外场的口碑。
6.本发明解决其技术问题所采用的技术方案如下:
7.一种电磁线圈开短路检测电路,包括第一双运算放大器u
3a
、第二双运算放大器u
3b
、第一电阻r1到第十三电阻r
13
、第一二极管d1到第四二极管d4、第一三极管u1、第二三极管u2、第二电容c2和第三电容c3;
8.所述第一电阻r1的一端与+18v.dc电源连接;第一电阻r1的另一端与第一双运算放大器u
3a
的第3脚连通后,再与第二电阻r2的一端连接,第一电阻r1的另一端同时与速度传感器和电液压力伺服阀的开路检测端口连接;所述第二电阻r2的另一端与电源地连接;
9.所述第三电阻r3的一端与+18v.dc电源连接;第三电阻r3的另一端与第一双运算放大器u
3a
的第2脚连通后,再与第四电阻r4的一端连接;所述第四电阻r4的另一端与电源地连接;所述第一双运算放大器u
3a
的第1脚同时与第四二极管d4的负极和第十三电阻r
13
的一端连接,所述第四二极管d4的正极与第十三电阻r
13
的另一端连接后,再同时与第三电容c3的
正极和第一二极管d1的正极连接,第三电容c3的负极与电源地连接;所述第一双运算放大器u
3a
的第8脚与+18v.dc电源连接;
10.所述第五电阻r5的一端与+18v.dc电源连接;第五电阻r5的另一端与第二双运算放大器u
3b
的第6脚连通后,再与第六电阻r6的一端连接;所述第六电阻r6的另一端与第九电阻r9的一端连接;第六电阻r6的另一端同时与速度传感器和电液压力伺服阀的短路检测端口连接;所述第九电阻r9的另一端与电源地连接;
11.所述第七电阻r7的一端与+18v.dc电源连接;第七电阻r7的另一端与第二双运算放大器u
3b
的第5脚连通后,再与第八电阻r8的一端连接;所述第八电阻r8的另一端与电源地连接;第二双运算放大器u
3b
的第4脚与电源地连接;所述第二双运算放大器u
3b
的第7脚同时与第三二极管d3的负极和第十二电阻r
12
的一端连接,所述第三二极管d3的正极与第十二电阻r
12
的另一端连接后,再同时与第二电容c2的正极和二极管d2的正极连接;所述第二电容c2的负极与电源地连接;
12.所述第一二极管d1的负极和第二二极管d2的负极连接后,再与第十电阻r
10
的一端连接;所述第十电阻r
10
的另一端同时与第十一电阻r
11
的一端和第一三极管u1的基极连接;所述第一三极管u1的集电极与第二三极管u2的集电极连接后,再与故障指示灯接口连接;所述第一三极管u1的发射极与第二三极管u2的基极连接;所述第二三极管u2的发射极同时与第十一电阻r
11
的另一端和电源地连接;
13.由第一双运算放大器u
3a
、第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4、第十三电阻r
13
、第一二极管d1、第四二极管d4和第三电容c3组成开路故障检测电路;
14.由第二双运算放大器u
3b
与第五电阻r5、第六电阻r6、第七电阻r7、第八电阻r8、第九电阻r9、第十二电阻r
12
、第二二极管d2、第三二极管d3和第二电容c2组成短路故障检测电路。
15.本发明的有益效果如下:
16.本发明在现有检测电路基础上增加故障辨识措施,该电路通过rc电路充电延迟特性,将故障检测电路输出的持续时间小于5s的虚警故障信号进行隔离,彻底消除速度传感器或电液压力伺服阀出现开、短路虚警故障信号,对于故障检测电路输出持续时间小于5s的虚警驱动信号则可以滤除,防滑故障指示等不会亮。只有当故障检测电路输出端的驱动信号持续时间大于5s后,即数字电传防滑刹车系统中的刹车指令传感器、机轮速度传感器、电液压力伺服阀三种附件产品电磁线圈真正发生开/短路故障时,此时开短路检测电路工作,刹车系统故障灯点亮。彻底解决由于外部信号干扰或连接器接触不可靠导致开短路故障检测电路输出“虚警率高”的问题。降低了刹车系统故障率90%,延长了刹车系统在外场使用的合格周期,提高了经济效益,提高了产品在外场的口碑。
附图说明
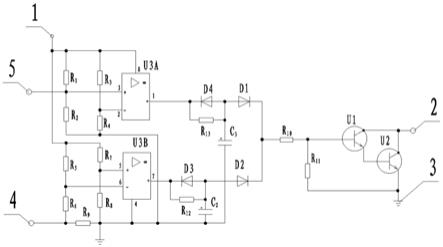
17.图1为本发明电路图。
18.其中,1
‑
+18v.dc,2
‑
故障指示灯接口,3
‑
电源地,4
‑
速度传感器和电液压力伺服阀短路检测端口,5
‑
速度传感器和电液压力伺服阀开路检测端口。
具体实施方式
19.下面结合附图和实施例对本发明进一步说明。
20.如图1所示,一种电磁线圈开短路检测电路,包括第一双运算放大器u
3a
、第二双运算放大器u
3b
、第一电阻r1到第十三电阻r
13
、第一二极管d1到第四二极管d4、第一三极管u1、第二三极管u2、第二电容c2和第三电容c3;
21.所述第一电阻r1的一端与+18v.dc电源连接;第一电阻r1的另一端与第一双运算放大器u
3a
的第3脚连通后,再与第二电阻r2的一端连接,第一电阻r1的另一端同时与速度传感器和电液压力伺服阀的开路检测端口连接;所述第二电阻r2的另一端与电源地连接;
22.所述第三电阻r3的一端与+18v.dc电源连接;第三电阻r3的另一端与第一双运算放大器u
3a
的第2脚连通后,再与第四电阻r4的一端连接;所述第四电阻r4的另一端与电源地连接;所述第一双运算放大器u
3a
的第1脚同时与第四二极管d4的负极和第十三电阻r
13
的一端连接,所述第四二极管d4的正极与第十三电阻r
13
的另一端连接后,再同时与第三电容c3的正极和第一二极管d1的正极连接,第三电容c3的负极与电源地连接;所述第一双运算放大器u
3a
的第8脚与+18v.dc电源连接;
23.所述第五电阻r5的一端与+18v.dc电源连接;第五电阻r5的另一端与第二双运算放大器u
3b
的第6脚连通后,再与第六电阻r6的一端连接;所述第六电阻r6的另一端与第九电阻r9的一端连接;第六电阻r6的另一端同时与速度传感器和电液压力伺服阀的短路检测端口连接;所述第九电阻r9的另一端与电源地连接;
24.所述第七电阻r7的一端与+18v.dc电源连接;第七电阻r7的另一端与第二双运算放大器u
3b
的第5脚连通后,再与第八电阻r8的一端连接;所述第八电阻r8的另一端与电源地连接;第二双运算放大器u
3b
的第4脚与电源地连接;所述第二双运算放大器u
3b
的第7脚同时与第三二极管d3的负极和第十二电阻r
12
的一端连接,所述第三二极管d3的正极与第十二电阻r
12
的另一端连接后,再同时与第二电容c2的正极和二极管d2的正极连接;所述第二电容c2的负极与电源地连接;
25.所述第一二极管d1的负极和第二二极管d2的负极连接后,再与第十电阻r
10
的一端连接;所述第十电阻r
10
的另一端同时与第十一电阻r
11
的一端和第一三极管u1的基极连接;所述第一三极管u1的集电极与第二三极管u2的集电极连接后,再与故障指示灯接口连接;所述第一三极管u1的发射极与第二三极管u2的基极连接;所述第二三极管u2的发射极同时与第十一电阻r
11
的另一端和电源地连接;
26.由第一双运算放大器u
3a
、第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4、第十三电阻r
13
、第一二极管d1、第四二极管d4和第三电容c3组成开路故障检测电路;
27.由第二双运算放大器u
3b
与第五电阻r5、第六电阻r6、第七电阻r7、第八电阻r8、第九电阻r9、第十二电阻r
12
、第二二极管d2、第三二极管d3和第二电容c2组成短路故障检测电路。
28.具体实施例:
29.机轮速度传感器正常工作电压为2.5v.dc、线圈开路电压为18v.dc、线圈短路电压为0v.dc;电液压力伺服阀正常工作电压为0.7v.dc~8v.dc内、线圈开路电压为18v.dc、线圈短路电压为0v.dc。
30.工作原理:当速度传感器、电液压力伺服阀出现开路或短路故障时,要求检测器输出高电平16.5v,控制故障指示灯常亮;
31.在速度传感器、电液压力伺服阀正常工作时,速度传感器、电液压力伺服阀正常工作电压为0.6v.dc~9v.dc,预置v
u3
‑3=10.24v,v
u3
‑2=11.06v,将速度传感器、电液压力伺服
阀接入第一电阻r1和第二电阻r2的连接端,v
u3
‑3<v
u3
‑2,双运算放大器u3的第1脚输出低电平为0v,故障指示灯常不亮;
32.当速度传感器、电液压力伺服阀出现开路故障时,开路电压为18v.dc,使v
u3
‑3>v
u3
‑2,双运算放大器u3的第1脚输出高电平为16.5v,故障指示灯常亮;
33.预置v
u3
‑5=4.5v,v
u3
‑6=4.72v,将速度传感器、电液压力伺服阀接入第六电阻r6和第九电阻r9的连接端,v
u3
‑5<v
u3
‑6,双运算放大器u3的第7脚输出低电平为0v,故障指示灯常不亮;
34.当速度传感器、电液压力伺服阀出现短路故障时,短路电压为0v.dc,使v
u3
‑5=4.5v,v
u3
‑6=3.93v,v
u3
‑5>v
u3
‑6,双运算放大器u3的第7脚输出高电平为16.5v,故障指示灯常亮;
35.本实施例提出一种电磁线圈开短路检测电路的参数确定方法,具体过程如下:
36.步骤1:确定rc电路的充电时间常数τ;
37.所述rc电路由第十二电阻r
12
和第二电容c2组成,第十二电阻r
12
的电阻值和第二电容c2的电容值均由设计确定。当第二双运算放大器u
3b
的第7脚输出高电平为16.5v时,通过第十二电阻对第二电容c2充电;rc电路由第十三电阻r
13
和第三电容c3的参数相同;
38.τ为rc电路的充电时间常数:τ=第十二电阻r
12
的电阻值
×
第二电容c2的电容值。
39.本实施例中:第十二电阻r
12
为33kω,第十三电阻r
13
为33kω,第二电容c2为47
×
10
‑6f,第三电容c3为47
×
10
‑6f,
40.τ=33
×
103×
47
×
10
‑6≈1.6s;
41.rc电路的放电时间常数为1.6s,电容c2两端的电压达到16.5v需要的时间超过5秒,只有当故障检测电路输出端的驱动信号持续时间大于5s后,即传感器、伺服阀真正发生短路故障时防滑故障字符才会亮,对于故障检测电路输出持续时间小于5s的虚警驱动信号则可以滤除,故障指示灯不亮。
42.步骤2:确定开路检测电路各元器件参数;
43.预置v
u3
‑3=10.24v,v
u3
‑2=11.06v,将速度传感器、电液压力伺服阀接入第一电阻r1和第二电阻r2的连接端,v
u3
‑3<v
u3
‑
2,双运算放大器u3的第1脚输出低电平为0v,故障指示灯常不亮;当速度传感器、电液压力伺服阀出现开路故障时,开路电压为18v.dc,使v
u3
‑3>v
u3
‑2,双运算放大器u3的第1脚输出高电平为16.5v,故障指示灯常亮;
44.第一电阻r1的一端与+18v.dc电源联通;第一电阻r1的另一端与双运算放大器u3的第3脚连通后,再与第二电阻r2的一端联通;第二电阻r2的另一端与电源地联通;预置v
u3
‑3=10.24v;
45.第三电阻r3的一端与+18v.dc电源联通;第三电阻r3的另一端与双运算放大器u3的第2脚连通后,再与第四电阻r4的一端联通;第四电阻r4的另一端与电源地联通;预置v
u3
‑2=11.06v;
46.该电路的电流不大于0.3ma,根据欧姆定律确定第一电阻r1的阻值为9.1kω,第二电阻r2的阻值为12kω,第三电阻r3的阻值为27kω,第四电阻r4的阻值为43kω;
47.本实施例中:所述第一双运算放大器u
3a
选用f158双运算放大器,通过欧姆定律确定第一电阻r1的阻值为9.1kω,第二电阻r2的阻值为12kω,第三电阻r3的阻值为27kω,第四电阻r4的阻值为43kω;第一二极管d1为1n5711;
48.步骤3:确定短路检测电路各元器件参数;
49.预置v
u3
‑5=4.5v,v
u3
‑6=4.72v,将速度传感器、电液压力伺服阀接入第六电阻r6和第九电阻r9的连接端,v
u3
‑5<v
u3
‑6,双运算放大器u3的第7脚输出低电平为0v,故障指示灯常不亮;当速度传感器、电液压力伺服阀出现短路故障时,短路电压为0v.dc,使v
u3
‑5=4.5v,v
u3
‑6=3.93v,v
u3
‑5>v
u3
‑6,双运算放大器u3的第7脚输出高电平为16.5v,故障指示灯常亮;
50.第五电阻r5的一端与+18v.dc电源联通;第五电阻r5的另一端与双运算放大器u3的第6脚连通后,再与第六电阻r6的一端联通;第六电阻r6的另一端与第九电阻r9的一端联通;第九电阻r9的另一端与电源地联通;预置v
u3
‑6=4.72v。
51.第七电阻r7的一端与+18v.dc电源联通;第七电阻r7的另一端与双运算放大器u3的第5脚连通后,再与第八电阻r8的一端联通;第八电阻r8的另一端与电源地联通;预置v
u3
‑5=4.5v。
52.该电路的电流不大于0.3ma,根据欧姆定律确定第五电阻r5的阻值为43kω,第六电阻r6的阻值为12kω,第七电阻r7的阻值为36kω,第八电阻r8的阻值为12kω;第九电阻r9的阻值为3.3kω;
53.本实施例中:所述第二双运算放大器u
3b
选用f158双运算放大器,通过欧姆定律确定第五电阻r5的阻值为43kω,第六电阻r6的阻值为12kω,第七电阻r7的阻值为36kω,第八电阻r8的阻值为12kω;第九电阻r9的阻值为3.3kω;第二二极管d2为1n5711;第三二极管d3为1n5711;
54.步骤4:确定驱动电路参数;
55.根据设计要求,双运算放大器u3的第1脚或第7脚输出电压大于8.7v时,故障指示灯亮;第一双运算放大器u
3a
的第1脚或第二双运算放大器u
3b
第7脚输出电压小于1.3v时,故障指示灯不亮。第十电阻r
10
与第十一电阻r
11
的电流典型值为0.2ma,根据欧姆定律,第十电阻r
10
的阻值为36kω,第十一电阻r
11
的阻值为9.1kω.
56.本实施例中:所述第一三极管u1与第二三极管u2选取3dg180b,第十电阻r
10
的阻值为36kω,第十一电阻r
11
的阻值为9.1kω。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1