一种定向分层靶标及其靶点的匹配方法
1.本发明属于计算机视觉中相机标定领域,涉及一种定向分层靶标,用于不同视场下相机高精度标定;进一步,还涉及该靶标中对靶点的匹配方法。
背景技术:
2.机器视觉技术在工业测量、三维重建等领域有着广泛的应用,相机作为检测及测量系统的关键组成部分,也是获取测量信息的重要工具。相机标定是指求解相机成像模型参数的过程,标定结果对整个检测或测量系统具有重要的影响,是决定检测或测量结果准确程度的关键环节。
3.一般情况下,借助标定靶标进行相机模型的参数求解,具有精度高、操作过程简单等优点。闵晓晨等发明了一种组合式微调相机标定用靶标,可以在相机视场不同下进行相机标定,但其需要使用多块标靶,并通过控制器连接丝杠调整标靶之间的位置,过程较为复杂、适用性有限。卢荣胜等发明了一种用于摄像机内外参数标定的方向型标定靶标,其通过在棋盘格中央位置设置方向型标志图案,实现了自动识别标靶的旋转方向,降低了标定复杂性,但是该发明的标定靶标尺寸固定,未考虑相机视场的变化,不适用于相机视场不同下的相机标定。由于相机景深的存在,在对于形状复杂、尺寸相差大的物体进行测量时,为了保证成像质量,需要对相机视场进行调整。标定靶标占相机视场的大小对于标定结果具有较大影响,其在图像中的占比应大于1/2。因此在相机视场大小变化的情况下,一般要使用大小不同的多块靶标来保证相机标定精度,既增加了测量工作成本,又降低了测量效率。
技术实现要素:
4.本发明的目的是提供一种定向分层靶标,解决了现有技术中存在的在相机视场大小变化的情况下,需要使用尺寸不同的多块靶标来保证相机标定精度的问题。
5.本发明所采用的技术方案是:
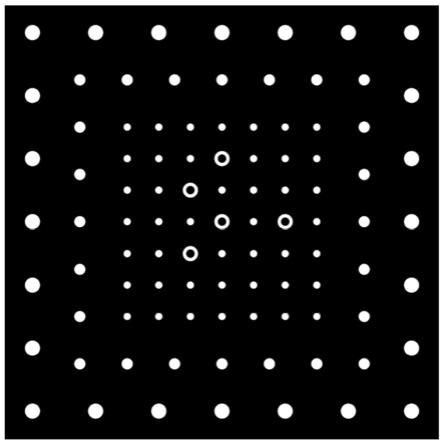
6.一种定向分层靶标,包括第一层阵列靶点,第一层阵列靶点外圈有第二层靶点,第二层靶点外圈有第三层靶点,第一层阵列靶点的靶点直径小于第二层靶点的靶点直径,第二层靶点的靶点直径小于第三层靶点的靶点直径。
7.本发明的特点还在于,
8.第一层阵列靶点为7
×
7的阵列靶点,第一层阵列靶点中包括5个圆环靶点,第二层靶点数为24个,第三层靶点数为24个。
9.5个圆环靶点的分别位于7
×
7阵列靶点的二行四列、三行三列、四行四列、四行六列、五行三列。
10.本发明的目的还在于提供一种定向分层靶标的靶点匹配方法。
11.本发明所采用的技术方案是:
12.一种定向分层靶标的靶点匹配方法,
13.具体步骤为:
14.步骤1,通过相机获取一种定向分层靶标的靶标图片;
15.步骤2,对靶标图片进行边缘检测提取封闭图形,然后分别计算封闭图形的圆度、偏心率和凸度,从而筛选出靶点,提取的各个靶点的圆心坐标;通过计算各个靶点的面积与周长的比值k筛选出圆环靶点;
16.步骤3,确定5个圆环坐标的位置作为标志点,将二行四列、三行三列、四行四列、四行六列、五行三列上的圆环靶点分别记为y、u、o、x和d,从而分别建立o
‑
xy组成的坐标系和o
‑
ud组成的坐标系,然后通过向量共线原则识别组合坐标系中坐标轴上的靶点,并根据位置关系匹配其余靶点;
17.步骤4,根据靶点与空间中靶标靶点的顺序匹配关系,利用张正友标定法得到相机的内外参数。
18.步骤2中:
19.圆度的计算方式如公式(1):
20.c=4π(a/p2)
ꢀꢀꢀ
(1)
21.式中:a为步骤2提取的封闭图形的面积;p为封闭图形的周长,c越接近1,封闭图形越接近于圆形,即是所需要提取的靶点;
22.偏心率的计算方式如公式(2):
23.e2+i2=1
ꢀꢀꢀ
(2)
24.式中:e为封闭图形的偏心率;i为封闭图形的惯性率;e越接近0,封闭图形越接近于圆形,即是所需要提取的靶点;
25.凸度的计算方式如公式(3):
26.v=s/h
ꢀꢀꢀ
(3)
27.式中:h为封闭图形的凸壳面积;s为封闭图形的面积,凸度v越接近1,封闭图形越接近于圆形,即是所需要提取的靶点。
28.步骤2中面积与周长的比值k的计算公式为:
[0029][0030]
式中:l为靶点的周长;s为靶点的面积,k值较小的5个靶点即为圆环靶点。
[0031]
步骤2中提取的各个靶点的圆心坐标的方法为:靶点图形的i+j阶图像矩为当i+j=1时,该点即为靶点的圆心,圆心的横纵坐标计算公式为:
[0032]
x=m
10
/m
00
,y=m
01
/m
00
ꢀꢀꢀ
(5)
[0033]
其中步骤3具体为:
[0034]
步骤3.1,对5个圆环靶点的圆心坐标进行处理计算,根据两点间的距离公式计算每个圆环靶点与其余圆环靶点的距离之和,其中o点位于定向分层靶标的中心,也处于5个圆环标志点的中央位置,与其余圆环标志点的距离之和最小的圆环标志点即为o点;与o点距离较大的两个圆环标志点分别为x、y;与o点距离最小的两个圆环标志点分别为u、d;
[0035]
步骤3.2,5个圆环靶点中有如下关系,步骤3.2,5个圆环靶点中有如下关系,根据向量位置判别方法识别出x,y,u,d,4个圆环标志点,并且据此
建立坐标系组合坐标系x
‑
oy和u
‑
od;
[0036]
步骤3.3,建立除5个圆环靶点外的各个靶点与o点之间的向量判断找出在ox坐标轴上的靶点,判断公式如下:
[0037][0038]
式中,cl为向量与的余弦值,其绝对值越接近1,则认为点m在x轴上,且cl为正时,点m在x正半轴,cl为负时,点m在x负半轴;
[0039]
步骤3.4,重复步骤3.3分别找出在ou、oy、od坐标轴上的靶点;
[0040]
步骤3.5,对坐标轴上的靶点进行处理,命名为d
ij
,其中i是靶点与o点之间的距离由近至远排列的序号,最近的靶点为1,最远为5;j是坐标轴的编号,以x轴负半轴为起点,共有8个坐标半轴,顺时针旋转编号分别为1
‑
8;x轴负半轴上的靶点分别为d
11
、d
21
…
d
51
;位于u轴正半轴上的靶点分别为d
12
、d
22
…
d
52
;位于y轴正半轴上的靶点分别为d
13
、d
23
…
d
53
;位于d轴正半轴上的靶点分别为d
18
、d
28
…
d
58
;
[0041]
步骤3.6,将o点作为靶标靶点的1号点,d
11
~d
18
为靶标靶点的2~9号靶点;
[0042]
步骤3.7,在d
21
~d
28
的每两个连续靶点中间存在1个待识别靶点p0,根据靶点p0与其在d
21
~d
28
相邻的两个靶点的位置关系即可判断出待识别靶点,判断方法如下式:
[0043][0044]
若满足上式则点p0是d
2j
和d
2j+1
之间的靶点,且顺序d
2j
→
p0→
d
2j+1
,据此得到的每两个连续靶点之间的靶点共8个,d
21
~d
28
与其之间的8个靶点为靶标靶点的10~25号靶点;
[0045]
步骤3.8,在d
31
~d
38
的每两个连续靶点中间存在2个待识别靶点p1、p2,根据靶点p1、p2与其在d
31
~d
38
相邻的两个靶点的位置关系判断出待识别靶点,判断方法如下式:
[0046][0047]
若点p1、p2是d
2j
和d
2j+1
之间的靶点,p1和p2的位置关系判断方法如下式:
[0048][0049]
若满足上式关系则点p1、p2的顺序为d
3j
→
p1→
p2→
d
3j+1
,若不满足,则点p1、p2的顺序为d
3j
→
p2→
p1→
d
3j+1
,据此得到的每两个连续靶点之间的靶点共16个,d
31
~d
38
与其之间的16个靶点为靶标靶点的26~49号靶点;
[0050]
步骤3.9,在d
41
~d
48
、d
51
~d
58
的每两个连续靶点中间同样存在2个待识别靶点,判断方法同上,d
41
~d
48
与其之间的16个靶点为靶标靶点的50~73号靶点;d
51
~d
58
与其之间的16个靶点为靶标靶点的74~97号靶点。
[0051]
本发明的有益效果是:
[0052]
一、本发明一种定向分层靶标适用于相机视场大小变化情况下的相机标定,用一块标定靶标代替多块靶标,降低了相机标定工作的成本,提高了工作效率;
[0053]
二、一至三层的靶点直径逐渐增大,在相机视场大小变化情况下可以保证图像中一些靶点所占的像素数量,提高圆心坐标的定位精度;
[0054]
三、一至三层增加的靶点数量相等,靶点匹配方法相似,定向分层标定靶标具有一定的扩展性;
[0055]
四、在应用定向分层靶标进行标定时,不要求靶标完全出现在相机视场中,视场最小时,只要包含第一层靶点即可;根据视场增大情况扩展靶点的层数,根据靶点匹配方法可以自动识别占据相机成像视场的所有靶点,能够提高相机标定的精度,降低标定工作的复杂度。
附图说明
[0056]
附图1是本发明一种定向分层靶标的结构图。
[0057]
附图2是本发明一种定向分层靶标的靶点匹配方法中所建立的组合坐标系示意图。
[0058]
附图3是本发明一种定向分层靶标的靶点匹配方法的排列编号结果图。
具体实施方式
[0059]
下面结合附图和具体实施方式对本发明进行详细说明。
[0060]
本发明提供一种定向分层靶标,如图1,包括第一层阵列靶点,第一层阵列靶点外圈有第二层靶点,第二层靶点外圈有第三层靶点,第一层阵列靶点的靶点直径小于第二层靶点的靶点直径,第二层靶点的靶点直径小于第三层靶点的靶点直径。
[0061]
其中第一层阵列靶点为7
×
7的阵列靶点,第一层阵列靶点中包括5个圆环靶点,5个圆环靶点的分别位于7
×
7阵列靶点的二行四列、三行三列、四行四列、四行六列、五行三列;第二层靶点数为24个,第三层靶点数为24个。
[0062]
为实现更大视场的高精度标定,本发明能够根据上述排布规律,扩展第四层、第五层靶点。
[0063]
在进行相机标定时,可能面临不同大小的成像视场。利用该定向分层靶标进行标定时,成像视场最小只包含第一层靶点,成像视场最大可包含所有靶点,中间的所有情形都可以,无需包含完整的外层靶点。根据靶点匹配方法可以自动识别占据相机成像视场的所有靶点,实现高精度的相机标定。
[0064]
本发明还提供一种对定向分层靶标的靶点匹配方法,具体步骤为:
[0065]
步骤1,通过相机获取包含一种定向分层靶标的靶标图片;
[0066]
步骤2,对靶标图片进行边缘检测提取封闭图形,然后分别计算封闭图形的圆度、偏心率和凸度,从而筛选出靶点,提取的各个靶点的圆心坐标;通过计算各个靶点的面积与周长的比值k筛选出圆环靶点;
[0067]
步骤3,确定5个圆环坐标的位置作为标志点,将二行四列、三行三列、四行四列、四行六列、五行三列上的圆环靶点分别记为y、u、o、x和d,从而分别建立o
‑
xy组成的坐标系和o
‑
ud组成的坐标系,然后通过向量共线原则识别组合坐标系中坐标轴上的靶点,并根据位置关系匹配其余靶点;
[0068]
步骤4,根据靶点与空间中靶标靶点的顺序匹配关系,利用张正友标定法得到相机
的内外参数。
[0069]
其中步骤2中筛靶点的方式为:
[0070]
①
圆度的计算方式如公式(1):
[0071]
c=4π(a/p2)
ꢀꢀꢀ
(1)
[0072]
式中:a为步骤2提取的封闭图形的面积;p为封闭图形的周长,c越接近1,封闭图形越接近于圆形,即是所需要提取的靶点;
[0073]
②
偏心率的计算方式如公式(2):
[0074]
e2+i2=1
ꢀꢀꢀ
(2)
[0075]
式中:e为封闭图形的偏心率;i为封闭图形的惯性率;e越接近0,封闭图形越接近于圆形,即是所需要提取的靶点;
[0076]
③
凸度的计算方式如公式(3):
[0077]
v=s/h
ꢀꢀꢀ
(3)
[0078]
式中:h为封闭图形的凸壳面积;s为封闭图形的面积,凸度v越接近1,封闭图形越接近于圆形,即是所需要提取的靶点。
[0079]
其中步骤2筛选圆环靶点的方式为:
[0080]
计算面积与周长的比值k,的公式为:
[0081][0082]
式中:l为靶点的周长;s为靶点的面积,k值较小的5个靶点即为圆环靶点。
[0083]
提取的各个靶点的圆心坐标的方法为:靶点图形的i+j阶图像矩为当i+j=1时,该点即为靶点的圆心,圆心的横纵坐标计算公式为:
[0084]
x=m
10
/m
00
,y=m
01
/m
00
ꢀꢀꢀ
(5)
[0085]
步骤3具体为:
[0086]
步骤3.1,对5个圆环靶点的圆心坐标进行处理计算,根据两点间的距离公式计算每个圆环靶点与其余圆环靶点的距离之和,其中o点位于定向分层靶标的中心,也处于5个圆环标志点的中央位置,与其余圆环标志点的距离之和最小的圆环标志点即为o点;与o点距离较大的两个圆环标志点分别为x、y;与o点距离最小的两个圆环标志点分别为u、d;
[0087]
步骤3.2,5个圆环靶点中有如下关系,步骤3.2,5个圆环靶点中有如下关系,根据向量位置判别方法识别出x,y,u,d,4个圆环标志点,并且据此建立坐标系组合坐标系x
‑
oy和u
‑
od,如图2;
[0088]
步骤3.3,建立除5个圆环靶点外的各个靶点与o点之间的向量判断找出在ox坐标轴上的靶点,判断公式如下:
[0089][0090]
式中,cl为向量与的余弦值,其绝对值越接近1,则认为点m在x轴上,且cl为正时,点m在x正半轴,cl为负时,点m在x负半轴;
[0091]
步骤3.4,重复步骤3.3分别找出在ou、oy、od坐标轴上的靶点;
[0092]
步骤3.5,对坐标轴上的靶点进行处理,命名为d
ij
,其中i是靶点与o点之间的距离由近至远排列的序号,最近的靶点为1,最远为5;j是坐标轴的编号,以x轴负半轴为起点,共有8个坐标半轴,顺时针旋转编号分别为1
‑
8;x轴负半轴上的靶点分别为d
11
、d
21
…
d
51
;位于u轴正半轴上的靶点分别为d
12
、d
22
…
d
52
;位于y轴正半轴上的靶点分别为d
13
、d
23
…
d
53
;位于d轴正半轴上的靶点分别为d
18
、d
28
…
d
58
;
[0093]
步骤3.6,将o点作为靶标靶点的1号点,d
11
~d
18
为靶标靶点的2~9号靶点;
[0094]
步骤3.7,在d
21
~d
28
的每两个连续靶点中间存在1个待识别靶点p0,根据靶点p0与其在d
21
~d
28
相邻的两个靶点的位置关系即可判断出待识别靶点,判断方法如下式:
[0095][0096]
若满足上式则点p0是d
2j
和d
2j+1
之间的靶点,且顺序d
2j
→
p0→
d
2j+1
,据此得到的每两个连续靶点之间的靶点共8个,d
21
~d
28
与其之间的8个靶点为靶标靶点的10~25号靶点;
[0097]
步骤3.8,在d
31
~d
38
的每两个连续靶点中间存在2个待识别靶点p1、p2,根据靶点p1、p2与其在d
31
~d
38
相邻的两个靶点的位置关系判断出待识别靶点,判断方法如下式:
[0098][0099]
若点p1、p2是d
2j
和d
2j+1
之间的靶点,p1和p2的位置关系判断方法如下式:
[0100][0101]
若满足上式关系则点p1、p2的顺序为d
3j
→
p1→
p2→
d
3j+1
,若不满足,则点p1、p2的顺序为d
3j
→
p2→
p1→
d
3j+1
,据此得到的每两个连续靶点之间的靶点共16个,d
31
~d
38
与其之间的16个靶点为靶标靶点的26~49号靶点;
[0102]
步骤3.9,在d
41
~d
48
、d
51
~d
58
的每两个连续靶点中间同样存在2个待识别靶点,判断方法同上,d
41
~d
48
与其之间的16个靶点为靶标靶点的50~73号靶点;d
51
~d
58
与其之间的16个靶点为靶标靶点的74~97号靶点。
[0103]
如图3为本发明方法的排列编号结果图。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1