晶片测量设备及其晶片传送方法与流程
晶片测量设备及其晶片传送方法
1.本发明主张2020年9月18日申请的美国正式申请案第17/025,868号的优先权及益处,该美国正式申请案的内容以全文引用的方式并入本发明中。
技术领域
2.本公开涉及一种晶片测量设备及其晶片传送方法。尤其涉及一种晶片测量设备及其晶片传送方法,能够在晶片测量之后缓冲多个晶片的传送。
背景技术:
3.在半导体产业中,一晶片测量设备用于测量一晶片的一状态。详而言之,首先,装载有多个晶片的一晶片容器移动到该晶片测量设备,然后每一晶片移动到用于测量的一测量单元。在测量之后,完成测量的多个晶片移回到用于装载晶片的该晶片容器。然而,当该晶片容器装载有小量的晶片时,因为测量每一晶片所需的时间远少于将该晶片容器移入或移离晶片测量设备所需的时间,所以晶片测量设备的生产量是有限的。
4.此外,因为测量完成的多个晶片应要返回到将其取出的该晶片容器中,因此该晶片容器可能需要移动至一分选机(sorter),用以分类测量完成的多个晶片到不同的晶片容器中,这可能会导致多个晶片容器的额外运输和消耗周期时间(cycle time)。
5.上文的“现有技术”说明仅提供背景技术,并未承认上文的“现有技术”说明公开本公开的标的,不构成本公开的现有技术,且上文的“现有技术”的任何说明均不应作为本发明的任一部分。
技术实现要素:
6.本公开的目的在于提出一种晶片测量设备及其晶片传送方法,以解决上述至少一个问题。
7.本公开的一实施例提供一种晶片测量设备,包括一本体、一晶片测量单元、一晶片存放件以及一机器人。该机器人设置在该本体上,且经配置以从一第一晶片容器移动一晶片到该晶片测量单元,其中该第一晶片容器设置在一装载端口区上;以及在该晶片测量单元测量该晶片之后,从该晶片测量单元移动该晶片到该晶片存放件。
8.在一些实施例中,该机器人还经配置以从该晶片存放件移动该晶片到一第二晶片容器,其中该第二晶片容器设置在该装载端口区上。
9.在一些实施例中,该晶片存放件还包括多个存放区。在一些实施例中,从该晶片测量单元移动该晶片到该晶片存放件的该步骤还包括:在该晶片测量单元测量及分类该晶片之后,从该晶片测量单元移动该晶片到该晶片存放件的其中一存放区。
10.在一些实施例中,每一存放区对应一晶片状态(wafer state)。
11.在一些实施例中,该晶片测量设备还包括一轨道。该轨道设置在该本体上。该机器人沿着该轨道移动。
12.在一些实施例中,该晶片存放件贴合到该本体,并独立于该装载端口区。
13.在一些实施例中,该晶片存放件还包括一入口端口,连接一气体源。
14.本公开的另一实施例提供一种晶片测量设备,包括:一本体、一晶片测量单元、一晶片存放件、一第一机器人以及一第二机器人。该本体包括一第一区、一第二区以及一缓冲区。该第一机器人设置在该本体的该第一区上,且经配置以从一第一晶片容器移动一晶片到该晶片测量单元,其中该第一晶片容器设置在一第一装载端口区上;以及在该晶片测量单元测量该晶片之后,从该晶片测量单元移动该晶片到该本体的该缓冲区。该第二机器人设置在该本体的该第二区上,且经配置以从该本体的该缓冲区移动该晶片到该晶片存放件。
15.在一些实施例中,该第二机器人还经配置以从该晶片存放件移动该晶片到一第二晶片容器。该第二晶片容器设置在一第二装载端口区。
16.在一些实施例中,该晶片存放件贴合到该本体,并独立于该第一装载端口区与该第二装载端口区。
17.在一些实施例中,该晶片存放件还包括多个存放区。在一些实施例中,从该晶片测量单元移动该晶片到该本体的该缓冲区的该步骤还包括:在该晶片测量单元测量并分类该晶片之后,从该晶片测量单元移动该晶片到该本体的该缓冲区。在一些实施例中,从该本体的该缓冲区移动该晶片到该晶片存放件的该步骤还包括:从该本体的该缓冲区移动该晶片到该晶片存放件的其中一存放区。
18.在一些实施例中,每一存放区对应一晶片状态。
19.在一些实施例中,该晶片测量设备还包括一第一轨道。该第一轨道设置在该本体的该第一区上。该第一机器人沿着该第一轨道移动。
20.在一些实施例中,该晶片测量设备还包括一第二轨道。该第二轨道设置在该本体的该第二区上。该第二机器人沿着该第二轨道移动。
21.在一些实施例中,该晶片存放件还包括一入口端口,连接一气体源。
22.在一些实施例中,该缓冲区位在该第一区与该第二区之间。
23.本公开的另一实施例提供一种晶片测量设备的晶片传送方法。该晶片传送方法包括:通过该晶片测量设备的一机器人组从一第一晶片容器移动一晶片到一晶片测量设备的一晶片测量单元,其中该第一晶片容器设置在一第一装载端口区;通过该晶片测量单元测量该晶片;以及在该晶片测量之后通过该机器人组从该晶片测量单元移动该晶片到该晶片测量设备的一晶片存放件。
24.在一些实施例中,该晶片测量设备的该晶片存放件独立于该第一装载端口区。
25.在一些实施例中,该机器人组还包括一第一机器人以及一第二机器人。在一些实施例中,从该第一晶片容器移动该晶片到该晶片测量单元的该步骤还包括:通过该第一机器人从该第一晶片容器移动该晶片到该晶片测量设备的该晶片测量单元。在一些实施例中,从该晶片测量单元移动该晶片到该晶片存放件的该步骤还包括:在该晶片测量单元测量该晶片之后通过该第一机器人从该晶片测量单元移动该晶片到该晶片测量设备的一缓冲区;以及通过该第二机器人从该晶片测量设备的该缓冲区移动该晶片到该晶片测量设备的该晶片存放件。
26.在一些实施例中,该晶片传送方法还包括:从该晶片存放件移动该晶片到一第二晶片容器。该第二晶片容器设置在一第二装载端口区上。
27.上文已相当广泛地概述本公开的技术特征及优点,以使下文的本公开详细描述得以获得较佳了解。构成本公开的权利要求标的的其它技术特征及优点将描述于下文。本公开所属技术领域中技术人员应了解,可相当容易地利用下文公开的概念与特定实施例可作为修改或设计其它结构或工艺而实现与本公开相同的目的。本公开所属技术领域中技术人员亦应了解,这类等效建构无法脱离随附的权利要求所界定的本公开的精神和范围。
附图说明
28.参阅实施方式与权利要求合并考虑附图时,可得以更全面了解本发明的公开内容,附图中相同的元件符号指相同的元件。
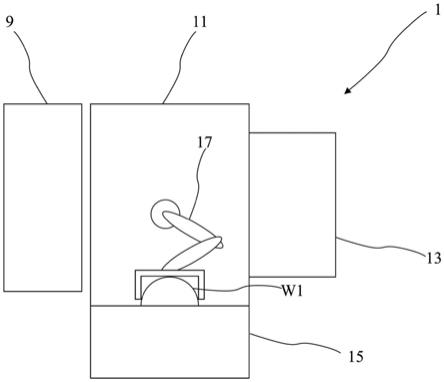
29.图1a例示本公开一些实施例的一晶片测量设备的示意图。
30.图1b例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
31.图1c例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
32.图1d例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
33.图2a例示本公开一些实施例的一晶片测量设备的示意图。
34.图2b例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
35.图2c例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
36.图2d例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
37.图2e例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
38.图2f例示本公开一些实施例的一晶片存放件的示意图。
39.图3a例示本公开一些实施例的一晶片测量设备的示意图。
40.图3b例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
41.图3c例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
42.图3d例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
43.图3e例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
44.图3f例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
45.图3g例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
46.图4a例示本公开一些实施例的一晶片测量设备的示意图。
47.图4b例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
48.图4c例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
49.图4d例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
50.图4e例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
51.图4f例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
52.图4g例示本公开一些实施例的一晶片测量设备传送一晶片的示意图。
53.图4h例示本公开一些实施例的一晶片存放件的示意图。
54.图5例示本公开一些实施例的一晶片传送方法的流程示意图。
55.图6例示本公开一些实施例的一晶片传送方法的流程示意图。
56.附图标记如下:
57.1:晶片测量设备
58.11:本体
59.13:晶片测量单元
60.15:晶片存放件
61.17:机器人
62.2:晶片测量设备
63.21:本体
64.23:晶片测量单元
65.25:晶片存放件
66.25a:存放区
67.27:机器人
68.29:轨道
69.3:晶片测量设备
70.31:本体
71.31a:第一区
72.31b:第二区
73.31c:缓冲区
74.33:晶片测量单元
75.35:晶片存放件
76.37a:机器人
77.37b:机器人
78.4:晶片测量设备
79.41:本体
80.41a:第一区
81.41b:第二区
82.41c:缓冲区
83.43:晶片测量单元
84.45:晶片存放件
85.45a:存放区
86.47a:机器人
87.47b:机器人
88.49a:轨道
89.49b:轨道
90.6a:装载端口区
91.6b:装载端口区
92.6c:装载端口区
93.6d:装载端口区
94.8a:装载端口区
95.8b:装载端口区
96.9:装载端口区
97.c10:晶片容器
98.c20:晶片容器
99.c21:目标晶片容器
100.c30:晶片容器
101.c40:晶片容器
102.c41:晶片容器
103.s501:步骤
104.s502:步骤
105.s503:步骤
106.s504:步骤
107.s601:步骤
108.s602:步骤
109.s603:步骤
110.s604:步骤
111.s605:步骤
112.s606:步骤
113.w1:晶片
114.w2:晶片
115.w3:晶片
116.w4:晶片
具体实施方式
117.现在使用特定语言描述附图中所示的本公开的实施例或例子。应当理解,本公开的范围无意由此受到限制。所描述的实施例的任何修改或改良,以及本发明件中描述的原理的任何进一步应用,所属技术领域中技术人员都认为是通常会发生的。元件编号可以在整个实施例中重复,但这并不一定意味着一个实施例的特征适用于另一实施例,即使它们共享相同的元件编号。
118.应当理解,虽然用语“第一(first)”、“第二(second)”、“第三(third)”等可用于本发明中以描述不同的元件、部件、区域、层及/或部分,但是这些元件、部件、区域、层及/或部分不应受这些用语所限制。这些用语仅用于从另一元件、部件、区域、层或部分中区分一个元件、部件、区域、层或部分。因此,以下所讨论的“第一装置(first element)”、“部件(component)”、“区域(region)”、“层(layer)”或“部分(section)”可以被称为第二装置、部件、区域、层或部分,而不背离本发明所教示。
119.本发明中使用的术语仅是为了实现描述特定实施例的目的,而非意欲限制本发明。如本发明中所使用,单数形式“一(a)”、“一(an)”,及“该(the)”意欲亦包括复数形式,除非上下文中另作明确指示。将进一步理解,当术语“包括(comprises)”及/或“包括(comprising)”用于本说明书中时,多个术语规定所陈述的特征、整数、步骤、操作、元件,及/或组件的存在,但不排除存在或增添一或更多个其他特征、整数、步骤、操作、元件、组件,及/或上述各者的群组。
120.图1a例示本公开一些实施例的一晶片测量设备1的示意图。晶片测量设备1可用于
测量存放在一晶片容器(例如前开式晶片传送盒(front-opening unified pod,foup))中的多个晶片。晶片测量设备1可包括:一本体11、一晶片测量单元13、一晶片存放件(wafer storage)15以及一机器人17。机器人17可设置在本体11上。晶片容器可设置在一装载端口区(load port area)9。
121.请参考图1b到图1d,例示本公开一些实施例的晶片测量设备1传送一晶片的示意图。详而言之,当装载有多个晶片的一晶片容器c10设置在装载端口区9上时,晶片测量设备1的机器人17可拿取存放在晶片容器c10中的一晶片w1,并从晶片容器c10移动晶片w1到晶片测量单元13。在机器人17将晶片w1置放在晶片测量单元13上时,晶片测量单元13可测量晶片w1,以确定晶片w1的一状态。
122.在一些实施例中,当晶片w1在测量之后需要放回晶片容器c10中时,机器人17可从晶片测量单元13移动晶片w1回到晶片容器c10。
123.在一些实施例中,当晶片w1在测量之后需要放在另一个晶片容器中时,机器人17可先从晶片测量单元13移动晶片w1到晶片存放件15。据此,晶片容器c10可移离晶片测量设备1,而无须将晶片w1放回晶片容器c10。
124.此外,因为晶片w1可存放在晶片存放件15中,直到用于存放晶片w1的一目标晶片容器设置在装载端口区9上为止,所以晶片w1可能无须通过一额外的分选机(sorter)再进行分类。
125.图2a例示本公开一些实施例的一晶片测量设备2的示意图。晶片测量设备2可用于测量存放在一晶片容器(例如foup)中的多个晶片。晶片测量设备2可包括:一本体21、一晶片测量单元23、一晶片存放件25、一机器人27以及一轨道29。
126.轨道29可设置在本体21上。机器人27可设置在本体21上,并沿着轨道29移动。晶片容器可设置在装载端口区8a及8b上。在一些实施例中,装载端口区8a及8b可分别具有装载端口元件(load port devices)。
127.请参考图2b到图2e,例示本公开一些实施例的晶片测量设备2传送一晶片的示意图。详而言之,当装载有多个晶片的一晶片容器c20设置在装载端口区8a时,晶片测量设备2的机器人27可拿取存放在晶片容器c20中的一晶片w2,并从晶片容器c20移动晶片w2到晶片测量单元23。在机器人27将晶片w2置放在晶片测量单元23上之后,晶片测量单元23可测量晶片w2,以确定晶片w2的一状态。
128.在一些实施例中,当晶片w2在测量之后需要放回晶片容器c20中时,机器人27可从晶片测量单元23移动晶片w2回到晶片容器c20。
129.在一些实施例中,当晶片w2在测量之后需要放在另一个晶片容器中时,机器人27可先从晶片测量单元23移动晶片w2到晶片存放件25。据此,晶片容器c20可移离晶片测量设备2,而无须将晶片w2放回晶片容器c20。
130.此外,因为晶片w2可存放在晶片存放件25中,直到用于存放晶片w2的一目标晶片容器c21设置在装载端口区8a与8b上为止,所以晶片w2可能无须通过一额外的分选机(sorter)再进行分类。
131.更特别地,在一些实施例中,在晶片测量设备2的操作期间,用于存放晶片w2的晶片容器c21可设置在装载端口区8b上。据此,当晶片容器c21准备好时,机器人237可从晶片存放件25移动晶片w2到晶片容器c21。
132.在一些实施例中,晶片存放件25可接合到本体21,并独立于装载端口区8a与8b。特别是,晶片存放件25可为一独立晶片存放单元,其贴合到本体21。换言之,晶片存放件25可用来当成晶片测量设备2的缓冲存放件,其用于存放测量完成的晶片(measured wafers)。
133.在一些实施例中,晶片存放件25可用于存放具有不同状态的多个晶片。请参考图2f,例示本公开一些实施例的晶片存放件25的示意图。详而言之,晶片存放件25可包括多个存放区25a。每一存放区25a可对应一个晶片状态。对应一特定晶片状态的存放区25a可用于存放测量为特定晶片状态的晶片。
134.举例来说,当一晶片通过晶片测量单元23而测量并分类为一状态“x”时,机器人27即从晶片测量单元23移动晶片到晶片存放件25的其中一个存放区25a,其用于存放具有状态“x”的多个晶片。再者,当用于存放具有状态“x”的多个晶片的一特定晶片容器设置在装载端口区8a或8b上时,机器人27即从用于存放具有状态“x”的多个晶片的多个存放区25a移动晶片到特定晶片容器。
135.类似地,当一晶片通过晶片测量单元23而测量并分类为一状态“y”时,机器人27即从晶片测量单元23移动晶片到晶片存放件25的其中一个存放区25a,其用于存放具有状态“y”的多个晶片。再者,当用于存放具有状态“y”的多个晶片的一特定晶片容器设置在装载端口区8a或8b上时,机器人27即从用于存放具有状态“y”的多个晶片的多个存放区25a移动晶片到特定晶片容器。
136.在一些实施例中,晶片存放件25可包括一入口端口(图未示),连接到一气体源(图未示)。因此,在晶片存放件25中的气体性分子污染物(airborne molecular contamination,amc)可被从气体源所提供的气体所清除。
137.图3a例示本公开一些实施例的一晶片测量设备3的示意图。晶片测量设备3可用于测量存放在一晶片容器(例如foup)中的多个晶片。晶片测量设备3可包括:一本体31、一晶片测量单元33、一晶片存放件35以及机器人37a与37b。
138.本体31可包括一第一区31a、一第二区31b以及一缓冲区31c。机器人37a可设置在本体31的第一区31a上。机器人37b可设置在本体31的第二区31b上。晶片容器可设置在装载端口区7a与7b上。在一些实施例中,装载端口区7a与7b可分别包括多个装载端口元件(load port devices)。
139.请参考图3b到图3g,例示本公开一些实施例的晶片测量设备3传送各晶片的示意图。详而言之,当装载有多个晶片的一晶片容器c30设置在装载端口区7a上时,晶片测量设备3的机器人37a可拿取存放在晶片容器c30中的一晶片w3,并从晶片容器c30移动晶片w3到晶片测量单元33。在机器人37a将晶片w3置放在晶片测量单元33上之后,晶片测量单元33可测量晶片w3,以确定晶片w3的一状态。
140.在一些实施例中,当晶片w3在测量之后需要放回晶片容器c30中时,机器人37a可从晶片测量单元33移动晶片w3回到晶片容器c30。
141.在一些实施例中,当晶片w3在测量之后需要放在另一个晶片容器中时,机器人37a可从晶片测量单元33移动晶片w3到本体31的缓冲区31c。接着,机器人37b可从本体31的缓冲区31c移动晶片w3到晶片存放件35。
142.如图3f所示,在一些实施例中,在将晶片w3置放在缓冲区31c上之后,机器人37a可从晶片容器c30移动另一个晶片到用于测量晶片的晶片测量单元33。如图3g所示,在一些实
施例中,晶片容器c30可移离晶片测量设备3,无须将晶片w3转回晶片容器c30。
143.此外,因为晶片w3可存放在晶片存放件35中,直到用于存放晶片w3的一目标晶片容器设置在装载端口区7b上为止,所以晶片w3可能无须通过一额外的分选机(sorter)再进行分类。
144.在一些实施例中,晶片存放件35可贴合到本体31,并独立于装载端口区7a与7b。特别是,晶片存放件35可为一独立晶片存放单元,其贴合到本体31。换言之,晶片存放件35可用来当作晶片测量设备3的一缓冲存放件,其用于存放测量完成的多个晶片。
145.再者,缓冲区31c可位在第一区31a与第二区31b之间。因此,缓冲区31c可用来当作暂时置放测量完成的多个晶片的一缓冲区域。
146.在一些实施例中,晶片存放件35可包括一入口端口(图未示),用于连接到一气体源(图未示)。因此,在晶片存放件35中的气体性分子污染物(amc)可被从气体源所提供的气体(例如干净的干空气、极度干净的干空气或氮)所清除。
147.图4a例示本公开一些实施例的一晶片测量设备4的示意图。晶片测量设备4可用于测量存放在一晶片容器(例如foup)中的多个晶片。晶片测量设备4可包括:一本体41、一晶片测量单元43、一晶片存放件45、机器人47a与47b以及轨道49a与49b。
148.本体41可包括一第一区41a、一第二区41b以及一缓冲区41c。轨道49a可形成在第一区41a上。机器人47a可设置在本体41的第一区41a上,并沿着轨道49a移动。轨道49b可形成在第二区41b上。机器人47b可设置在本体41的第二区41b上,并沿着轨道49b移动。晶片容器可设置在装载端口区6a到6d上。在一些实施例中,装载端口区6a到6d可分别包括多个装载端口元件。
149.请参考图4b到图4g,例示本公开一些实施例的晶片测量设备4传送各晶片的示意图。详而言之,当装载有多个晶片的一晶片容器c40设置在装载端口区6a上时,晶片测量设备4的机器人47a可拿取存放在晶片容器c40中的一晶片w4,并从晶片容器c40移动晶片w4到晶片测量单元43。在机器人47a将晶片w4置放在晶片测量单元43上之后,晶片测量单元43可测量晶片w4,以确定晶片w4的一状态。
150.在一些实施例中,当晶片w4在测量之后需要放回晶片容器c40中时,机器人47a可从晶片测量单元43移动晶片w4回到晶片容器c40。
151.在一些实施例中,当晶片w4在测量之后需要放在另一个晶片容器中时,机器人47a可从晶片测量单元43移动晶片w4到本体41的缓冲区41c。接着,机器人47b可从本体41的缓冲区41c移动晶片w4到晶片存放件45。
152.在一些实施例中,在将晶片w4置放在缓冲区41c上之后,机器人47a可从晶片容器c40移动另一个晶片到用于晶片测量的晶片测量单元43。在一些实施例中,晶片容器c40可移离晶片测量设备4,无须将晶片w4转回到晶片容器c40。
153.再者,在晶片测量设备4的操作期间,用于存放晶片w4的一晶片容器c41可设置在装载端口区6c上。据此,当晶片容器c41准备好时,机器人47b可从晶片存放件45移动晶片w4到晶片容器c41。
154.在一些实施例中,晶片存放件45可贴合到本体41,并独立于装载端口区6a到6d。特别是,晶片存放件45可为一独立晶片存放单元,其贴合到本体41。换言之,晶片储存件45可使用来当作晶片测量设备4的一缓冲存放件,其用于存放测量完成的多个晶片。
155.再者,缓冲区41c可位在第一区41a与第二区41b之间。因此,缓冲区41c可使用来当作暂时置放测量完成的多个晶片的一缓冲区域。
156.在一些实施例中,晶片存放件45可使用来存放具有不同状态的多个晶片。请参考图4h,例示本公开一些实施例的晶片存放件45的示意图。详而言之,晶片存放件45可包括多个存放区45a。每一存放区45a可对应一个晶片状态。对应一特定晶片状态的存放区45a可使用来存放测量为特定晶片状态的晶片。
157.举例来说,每一存放区45a可存放六个晶片。当一晶片通过晶片测量单元43而测量并分类为一状态“x”时,机器人47a即从晶片测量单元43移动晶片到本体41的缓冲区41c,然后机器人47b从本体41的缓冲区41c移动晶片到存放区45a,其用于存放具有状态“x”的多个晶片。再者,当用于存放具有状态“x”的多个晶片的一特定晶片容器设置在装载端口区6a到6d上时,机器人47b即从用于存放具有状态“x”的多个晶片的多个存放区45a移动晶片到特定晶片容器。
158.类似地,当一晶片通过晶片测量单元43而测量并分类为一状态“y”时,机器人47a即从晶片测量单元43移动晶片到本体41的缓冲区41c,然后机器人47b从本体41的缓冲区41c移动晶片到存放区45a,其用于存放具有状态“y”的多个晶片。再者,当用于存放具有状态“y”的多个晶片的一特定晶片容器设置在装载端口区6a或6d上时,机器人47b即从用于存放具有状态“y”的多个晶片的多个存放区45a移动晶片到特定晶片容器。
159.在一些实施例中,晶片存放件45可包括一入口端口(图未示),用于连接到一气体源(图未示)。因此,在晶片存放件45中的气体性分子污染物(amc)可被从气体源所提供的气体(例如干净的干空气、极度干净的干空气或氮)所清除。
160.图5例示本公开一些实施例的一晶片传送方法的流程示意图。依据一些实施例的晶片传送方法用于使用在一晶片测量设备(例如多个前述实施例的晶片测量设备)。晶片测量设备可使用来测量存放在一晶片容器(例如一foup)中的多个晶片。晶片容器可设置在一装载端口区上。晶片传送方法的详细步骤描述如下。
161.执行步骤s501,通过该晶片测量设备的一机器人从该晶片容器拿取一晶片。执行步骤s502,通过该机器人从该晶片容器移动该晶片到该晶片测量设备的一晶片测量单元。执行步骤s503,通过该晶片测量单元测量该晶片。在晶片测量之后,执行步骤s504,通过该机器人从晶片测量单元移动晶片到晶片测量设备的一晶片存放件。
162.在一些实施例中,在该机器人从该晶片容器拿取该晶片之后,当不再需要该晶片容器时,该晶片容器可移离该装载端口区。同时,用于存放测量完成的该晶片的一目标晶片容器,可移到该装载端口区。因此,该晶片传送方法还可包括一步骤:当该目标晶片容器准备好时,通过该机器人从该晶片存放件移动该晶片到目标晶片容器。
163.在一些实施例中,该晶片存放件可独立于装载端口区。特别是,该晶片存放件可为该晶片测量设备的一独立晶片存放单元。换言之,该晶片存放件可使用来当作该晶片测量设备的一缓冲存放件,其用于存放测量完成的多个晶片。因此,该晶片可暂时存放在用于后来步骤的该晶片测量设备的该独立晶片存放件。
164.应当理解,当需要时,可调整该晶片存放件贴合到该晶片测量设备的位置。上述的多个实施例并未意图限制该晶片存放件贴合到本公开的该晶片测量设备的位置。
165.图6例示本公开一些实施例的一晶片传送方法的流程示意图。依据一些实施例的
晶片传送方法用于使用在一晶片测量设备(例如多个前述实施例的晶片测量设备)。晶片测量设备可使用来测量存放在一晶片容器(例如一foup)中的多个晶片。晶片容器可设置在一第一装载端口区上。晶片传送方法的详细步骤描述如下。
166.执行步骤s601,通过该晶片测量设备的一第一机器人从该晶片容器拿取一晶片。执行步骤s602,通过该第一机器人从该晶片容器移动该晶片到该晶片测量设备的一晶片测量单元。执行步骤s603,通过该晶片测量单元测量该晶片。
167.接着,执行步骤s604,通过该第一机器人从该晶片测量单元移动该晶片到该晶片测量设备的一缓冲区。执行步骤s605,通过该晶片测量设备的一第二机器人从该缓冲区移动该晶片到该晶片测量设备的一晶片存放件。
168.在一些实施例中,当用于存放测量完成的多个晶片的一第二晶片容器移动到一第二装载端口区时,执行步骤s606,通过该第二机器人从该晶片存放件移动该晶片到该第二晶片容器。
169.需要特别说明的是,上述实施例中提到的多个机械人以及该晶片测量单元可以通过一制造执行系统(mes)(图未出)所控制。再者,机器人移动的操作和晶片测量单元的测量亦可由mes进行安排。
170.mes可包括一中央处理单元(cpu)、能够执行相关指令的其他硬体电路元件,或基于上述公开通过所属技术领域中技术人员所熟知的多个运算电路(computing circuits)的组合。
171.在一些实施例中,mes可包含在一外部元件中,其可通过多个通信总线(communication buses)而与该晶片测量设备进行通信连接。在一些实施例中,mes可嵌置在该晶片测量设备中,并通过多个通信总线与多个电子元件进行通信连接。
172.此外,多个通信总线可用于在多个电子元件之间传送数据,多个电子元件例如mes元件、多个机器人以及多个晶片测量单元,而多个通信总线可包括一电子总线界面、一光学总线界面,或一无线总线界面。然而,如此描述并未意图限制本公开的多个硬体执行实施例。
173.本公开的一实施例提供一种晶片测量设备,包括:一本体、一晶片测量单元、一晶片存放件以及一机器人。该机器人设置在该本体上,且经配置以从一第一晶片容器移动一晶片到该晶片测量单元,其中该第一晶片容器设置在一装载端口区上;以及在该晶片测量单元测量该晶片之后,从该晶片测量单元移动该晶片到该晶片存放件。
174.本公开的另一实施例提供一种晶片测量设备,包括:一本体、一晶片测量单元、一晶片存放件、一第一机器人以及一第二机器人。该本体包括一第一区、一第二区以及一缓冲区。该第一机器人设置在该本体的该第一区上,且经配置以从一第一晶片容器移动一晶片到该晶片测量单元,其中该第一晶片容器设置在一第一装载端口区上;以及在该晶片测量单元测量该晶片之后,从该晶片测量单元移动该晶片到该本体的该缓冲区。该第二机器人设置在该本体的该第二区上,且经配置以从该本体的该缓冲区移动该晶片到该晶片存放件。
175.本公开的另一实施例提供一种晶片测量设备的晶片传送方法。该晶片传送方法包括:通过该晶片测量设备的一机器人组从一第一晶片容器移动一晶片到一晶片测量设备的一晶片测量单元,其中该第一晶片容器设置在一第一装载端口区;通过该晶片测量单元测
量该晶片;以及在该晶片测量之后通过该机器人组从该晶片测量单元移动该晶片到该晶片测量设备的一晶片存放件。
176.虽然已详述本公开及其优点,然而应理解可进行各种变化、取代与替代而不脱离权利要求所定义的本公开的精神与范围。例如,可用不同的方法实施上述的许多工艺,并且以其他工艺或其组合替代上述的许多工艺。
177.再者,本发明的范围并不受限于说明书中所述的工艺、机械、制造、物质组成物、手段、方法与步骤的特定实施例。本领域技术人员可自本公开的公开内容理解可根据本公开而使用与本发明所述的对应实施例具有相同功能或是达到实质上相同结果的现存或是未来发展的工艺、机械、制造、物质组成物、手段、方法、或步骤。据此,此等工艺、机械、制造、物质组成物、手段、方法、或步骤包含于本发明的权利要求内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1