基于非接触式检测的输电线路分布式故障定位装置及方法与流程
1.本发明涉及智能电网领域,具体涉及一种基于非接触式检测的输电线路分布式故障定位装置及方法。
背景技术:
2.随着中国电网建设的飞速发展,特高压输电线路投运或在建的总长度已超3万km,其电压等级高,输电距离长,跨越山区、河流、高铁、高速公路及重要电力线路的区段多,其故障的性质、定位及诊断分析对电力系统的安全、可靠、经济运行具有重要意义。常规安装于变电站内的行波测距装置虽然从原理上可以准确定位故障点位置,但在实际应用中,高阻故障等弱行波信号的有效提取、故障点反射波与对端母线反射波的有效识别和雷电干扰的有效辨识和定位等问题很大程度影响了其定位的准确性和实际效果。
3.近年来业界提出了一种通过分布式安装监测终端,结合运维中心分析服务系统来综合诊断的新型技术路线,其相对于常规的站内测距装置,区间距离大为缩短,区间内的线路参数线性度大为增强,中心站功能实施也更加灵活,为大幅提高输电线路故障位置定位精度和诊断分析准确度提供了基础条件。目前国内外已有若干高等院校、科研院所和设备制造商进行了该领域解决方案的研究及产品制造,取得了一系列科研成果,故障诊断效果有了明显进步。
4.现有分布式行波定位技术需要将监测终端直接安装于输电线路导线上,易出现以下突出的问题:
5.一是:监测终端必须停电安装,由于输电线路电压等级高、输电容量大,停电安装会降低电网运行可靠性与经济性,对于供电可靠性要求较高的线路,往往由于无法停电而使得终端无法安装,大大降低了本技术的适用性;
6.二是:监测终端运行于导线上高压强磁场环境,对监测终端内部数据处理模块、通信模块等核心部件运行带来不利影响,难以保证长期运行可靠性;
7.三是:监测终端安装于导线上后,运维人员无法按需对设备进行维修和保养,当出现局部模块损坏或功能异常后,往往导致整机运行异常,降低了故障监测与诊断的可靠性。
8.基于以上情况,需要对分布式故障定位技术进行更新和升级。
技术实现要素:
9.本发明所要解决的技术问题是提供一种基于非接触式检测的输电线路分布式故障定位装置及方法,以克服上述现有技术中的不足。
10.本发明解决上述技术问题的技术方案如下:一种基于非接触式检测的输电线路分布式故障定位,包括:
11.非接触式故障监测终端,布置于三相导线下方杆塔上,以实时采集故障时三相导线在周围空间产生的工频磁场信号、空间电场信号、行波磁场信号和行波电场信号;
12.数据中心,与非接触式故障监测终端无线连接,以获取非接触式故障监测终端的
工频磁场信号、空间电场信号、行波磁场信号和行波电场信号,并对工频磁场信号、空间电场信号进行有效信号优选和重构,以获得工频磁场基波信号、空间电场基波信号,并以此判断线路是否发生故障,若为是,则通过行波磁场信号、行波电场信号进一步定位故障点,若为否,则线路无故障。
13.在上述技术方案的基础上,本发明还可以做如下改进。
14.进一步,非接触式故障监测终端包括:
15.磁场传感器,具有两路电压信号输出;
16.磁场信号调理及处理电路,其与磁场传感器的两路输出电压信号相连,并对其中一路电压信号依次进行电压跟随处理、低通滤波、多路放大、模数变换,以获得至少4路工频磁场信号;以及对另一路电压信号依次进行电压跟随处理、高通滤波、多路放大、模数变换,以获得至少4路行波磁场信号;
17.电场传感器,具有两路电压信号输出;
18.电场信号调理及处理电路,其与电场传感器的两路输出电压信号相连,并先对两路电压信号分别进行电压跟随处理,然后再进入加法以将两路信号合二为一,合二为一的信号依次进行低通滤波、多路放大和模数变换,以获得至少4路空间电场信号;同时,合二为一的信号依次进行高通滤波、多路放大和模数变换,以获得至少4路行波电场信号;
19.中央处理单元,其与磁场信号调理及处理电路、电场信号调理及处理电路输出相连,并对磁场信号调理及处理电路、电场信号调理及处理电路所上传的信号进行触发条件判断;
20.若各路工频磁场信号中,任意一路满足触发条件,则将预定时长的多路信号同时提取出来并缓存于缓存中;
21.若各路行波磁场信号中,任意一路满足触发条件,则将多路信号同步缓存于缓存中;
22.若各路空间电场信号中,任意一路满足触发条件,则将预定时长的多路信号同时提取出来并缓存于缓存中;
23.若各路行波电场信号中,任意一路满足触发条件,则将多路信号同步缓存至缓存于缓存中;
24.gps/北斗时钟,对缓存内的信号进行授时;
25.数据传输模块,与中央处理单元的输出相连,以及与数据中心建立通讯连接,并将授时后的信号上传至数据中心。
26.进一步,磁场信号调理及处理电路包括:
27.两个电压跟随器a,其分别与磁场传感器两路电压信号输出相连;
28.低通滤波电路a,其与其中一个电压跟随器a的输出相连;
29.高通滤波电路a,其与另一个电压跟随器a的输出相连;
30.两个至少4路放大器a,其中一个与低通滤波电路a的输出相连,另一个与高通滤波电路a的输出相连;
31.模数变换器a,每个放大器a的每一路输出上均连接一个模数变换器a。
32.进一步,电场信号调理及处理电路包括:
33.两个电压跟随器b,其分别与电场传感器两路电压信号输出相连;
34.加法器,其输入分别与两个电压跟随器b的输出相连;
35.低通滤波电路b,其与加法器的输出相连;
36.高通滤波电路b,其与加法器的输出相连;
37.两个至少4路放大器b,其中一个与低通滤波电路b的输出相连,另一个与高通滤波电路b的输出相连;
38.模数变换器b,每个放大器b的每一路输出上均连接一个模数变换器b。
39.进一步,磁场传感器包括:
40.多根圆柱棒胚体,其平行布置,材质为高磁导率纳米晶;
41.漆包线,其绕制于多根圆柱棒胚体上,并在导入电流后以使各圆柱棒胚体产生相同方向的磁场,每根圆柱棒胚体上绕制的匝数相同;
42.无感电阻r,其两个接线端分别接入漆包线的正负极上。
43.进一步,电场传感器包括:
44.壳体,其上盖和下盖均为金属材质,且接地,以及其两侧侧板材质为阻燃材料;
45.两块金属极板,垂直布置于壳体内,且竖向金属极板垂直于大地,并与三相导线平行,水平向金属极板与三相导线以及大地均平行;
46.导线上三相电场在竖向金属极板上形成悬浮电位u1,以及导线上三相电场在水平向金属极板上形成悬浮电位u2;悬浮电位u1与u2的大小与三相导线上电压成正比。
47.一种基于非接触式检测的输电线路分布式故障定位方法,包括如下步骤:
48.s100、实时采集故障时三相导线在周围空间产生的工频磁场信号、空间电场信号、行波磁场信号和行波电场信号;
49.s200、对工频磁场信号以及空间电场信号分别进行优选,以分别获得工频磁场目标信号数组和空间电场目标信号数组;
50.s300、对工频磁场目标信号数组、空间电场目标信号数组分别进行重构,以分别获得工频磁场基波信号和空间电场基波信号;
51.s400、根据工频磁场基波信号、空间电场基波信号判断该线路是否发生故障,若判断出该线路发生故障,若为是,则通过行波磁场信号、行波电场信号进一步定位故障点,若为否,则线路无故障。
52.进一步,对工频磁场信号进行有效信号优选具体为:
53.获取非接触式故障监测终端各采集通道故障触发时所上传的多路工频磁场信号,并判断最后一路上传的磁场信号是否饱和,记为ad
n
,假设ad
n
对应的波形数组为y[n],自第一个数据点起,往后提取一个周期的数据长度n0,并计算有效值:
[0054][0055]
按照同样方式,依次从第二个点、第三个点
……
往后取n0长度计算有效值,依次得到e(2)、e(3)、e(4)
……
,当某一点往后数据点不足n0时,停止计算;
[0056]
依次判断e(1)、e(2)、e(3)
……
与的大小,其中e
′
为ad
n
通道
量程幅值的绝对值,ε%为偏差系数;
[0057]
当任意时,认为该路信号饱和,反之当所有e(1)、e(2)、e(3)
……
都小于等于时,ad
n
路信号不饱和;
[0058]
若ad
n
饱和,则ad
n
路信号无效,则取ad
n
‑1信号进行饱和判断,若依然饱和,则进一步向前判断ad
n
‑2,直至找到第一个不饱和的信号,此时该信号作为目标信号,等待进入下一步计算;
[0059]
重复上述过程,以获得工频磁场目标信号数组。
[0060]
进一步,对工频磁场目标信号数组的重构具体为:
[0061]
依次计算以下复数:
[0062][0063][0064]
……
[0065][0066]
e为自然对数,j为复数单位,有j2=
‑
1;
[0067]
当上述公式起始点往后数据点不足n0时,停止计算;
[0068]
所计算的复数对应的相角依次为∠z(1)、∠z(2)、
……
、∠z(n);
[0069]
重构的工频磁场基波信号为y0,那么有:
[0070]
y0(1)=e(1)
×
cos∠z(1)
[0071]
y0(2)=e(2)
×
cos∠z(2)
[0072]
……
[0073]
y0(n)=e(n)
×
cos∠z(n)。
[0074]
进一步,故障判断:
[0075]
工频磁场目标信号数组e(1)、e(2)、e(3)
……
e(n)中最大值记为e
max
,最小值记为e
min
;
[0076]
从e(1)、e(2)、e(3)
……
e(n)依次遍历,找到满足下式的e值:
[0077][0078]
首次找到两个满足上式的e值,假设为e(m)和e(n),相应的磁场基波信号y中元素y(m)和y(n)对应的时间分别为t
n
,t
m
;
[0079]
若满足:|t
m
‑
t
n
|∈[20,100]
[0080]
则判断该线路发生故障,反之若所有工频磁场基波信号都不满足该式,则认为该
线路未发生故障。
[0081]
本发明的有益效益是:
[0082]
1)非接触式故障监测终端分布式安装于输电线路杆塔上,从而无需停电安装;
[0083]
2)不易损坏且维护方便;
[0084]
3)大幅提升了分布式故障定位技术的适用性,为输电线路的稳定运行保驾护航。
附图说明
[0085]
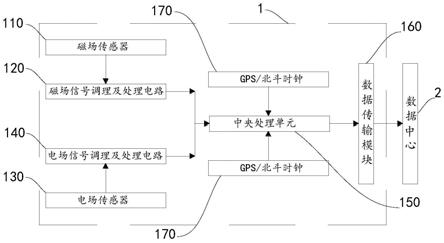
图1为本发明所述基于非接触式检测的输电线路分布式故障定位装置的电路图;
[0086]
图2为本发明中涉及磁场信号处理的电路图;
[0087]
图3为本发明中涉及电场信号处理的电路图;
[0088]
图4为本发明中磁场传感器的正视图;
[0089]
图5为本发明中磁场传感器内四根圆柱棒胚体的分布图;
[0090]
图6为本发明中磁场传感器的绕线图;
[0091]
图7为本发明中电场传感器的结构图。
[0092]
附图中:
[0093]
1、非接触式故障监测终端,110、磁场传感器,111、圆柱棒胚体,112、漆包线,113、无感电阻r,114、外壳,120、磁场信号调理及处理电路,121、电压跟随器a,122、低通滤波电路a,123、高通滤波电路a,124、放大器a,125、模数变换器a,130、电场传感器,131、壳体,132、金属极板,140、电场信号调理及处理电路,141、电压跟随器b,142、加法器,143、低通滤波电路b,144、高通滤波电路b,145、放大器b,146、模数变换器b,150、中央处理单元,160、数据传输模块,170、gps/北斗时钟,2、数据中心。
具体实施方式
[0094]
以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
[0095]
实施例1
[0096]
如图1所示,一种基于非接触式检测的输电线路分布式故障定位装置,包括:非接触式故障监测终端1和数据中心2;
[0097]
非接触式故障监测终端1布置于三相导线下方杆塔上,通过非接触式故障监测终端1实时采集故障时三相导线在周围空间产生的工频磁场信号、空间电场信号、行波磁场信号和行波电场信号;
[0098]
数据中心2与非接触式故障监测终端1无线连接,数据中心2用以获取非接触式故障监测终端1的工频磁场信号、空间电场信号、行波磁场信号和行波电场信号,并对工频磁场信号、空间电场信号进行有效信号优选和重构,以获得工频磁场基波信号、空间电场基波信号,并以此判断线路是否发生故障,若为是,则通过行波磁场信号、行波电场信号进一步定位故障点,若为否,则线路无故障。
[0099]
数据中心2与非接触式故障监测终端1之间可以通过3g无线通讯方式连接,或通过4g无线通讯方式连接,或通过5g无线通讯方式连接等。实施例2
[0100]
如图1、图2、图3所示,本实施例为在实施例1的基础上所进行的进一步改进,其具
体如下:
[0101]
非接触式故障监测终端1包括:磁场传感器110、磁场信号调理及处理电路120、电场传感器130、电场信号调理及处理电路140、中央处理单元150、数据传输模块160和两个gps/北斗时钟170;
[0102]
磁场传感器110具有两路电压信号输出;
[0103]
磁场信号调理及处理电路120与磁场传感器110的两路输出电压信号相连,并且磁场信号调理及处理电路120对磁场传感器110的其中一路电压信号依次进行电压跟随处理、低通滤波、多路放大、模数变换,以获得至少4路工频磁场信号;同时磁场信号调理及处理电路120对磁场传感器110的对另一路电压信号依次进行电压跟随处理、高通滤波、多路放大、模数变换,以获得至少4路行波磁场信号;
[0104]
电场传感器130具有两路电压信号输出;
[0105]
电场信号调理及处理电路140与电场传感器130的两路输出电压信号相连,并且电场信号调理及处理电路140先对电场传感器130的两路电压信号分别进行电压跟随处理,然后再进入加法以将两路信号合二为一,电场信号调理及处理电路140再对合二为一的信号依次进行低通滤波、多路放大和模数变换,以获得至少4路空间电场信号;同时,电场信号调理及处理电路140对合二为一的信号依次进行高通滤波、多路放大和模数变换,以获得至少4路行波电场信号;
[0106]
中央处理单元150与磁场信号调理及处理电路120的输出相连,以对磁场信号调理及处理电路120所上传的信号进行触发条件判断;
[0107]
若各路反应磁场大小的数字信号中,任意一路满足触发条件,则将预定时长的多路信号同时提取出来并缓存于缓存中;
[0108]
若各路反应磁场变化的数字信号中,任意一路满足触发条件,则将多路信号同步缓存于缓存中;
[0109]
与此同时,中央处理单元150还与电场信号调理及处理电路140输出相连,并对电场信号调理及处理电路140所上传的数字信号进行触发条件判断;
[0110]
若各路反应电场大小的数字信号中,任意一路满足触发条件,则将预定时长的多路信号同时提取出来并缓存于缓存中;
[0111]
若各路反应电场变化的数字信号中,任意一路满足触发条件,则将多路信号同步缓存至缓存于缓存中;
[0112]
gps/北斗时钟170与中央处理单元150相连,以对缓存内的信号进行授时;
[0113]
数据传输模块160与中央处理单元150的输出相连,以及数据传输模块160与数据中心2建立通讯连接,并将授时后的信号上传至数据中心2,数据传输模块160采用3g/4g网络通讯。
[0114]
实施例3
[0115]
如图1、图2、图3所示,本实施例为在实施例2的基础上所进行的进一步改进,其具体如下:
[0116]
磁场信号调理及处理电路120中低通滤波截止频率为200hz~500hz;
[0117]
磁场信号调理及处理电路120中高通滤波截止频率为2khz~10khz;
[0118]
而电场信号调理及处理电路140中低通滤波截止频率为200hz~500hz;
[0119]
电场信号调理及处理电路140中高通滤波截止频率为2khz~10khz。
[0120]
实施例4
[0121]
如图1、图2、图3所示,本实施例为在实施例3的基础上所进行的进一步改进,其具体如下:
[0122]
磁场信号调理及处理电路120包括:两个电压跟随器a121、低通滤波电路a122、高通滤波电路a123、两个放大器a124和模数变换器a125;
[0123]
两个电压跟随器a121分别与磁场传感器110两路电压信号输出相连;
[0124]
低通滤波电路a122与其中一个电压跟随器a121的输出相连;
[0125]
高通滤波电路a123与另一个电压跟随器a121的输出相连;
[0126]
两个放大器a124中的一个与低通滤波电路a122的输出相连,另一个与高通滤波电路a123的输出相连;
[0127]
而每个放大器a124的每一路输出上均连接一个模数变换器a125。
[0128]
通常情况下,放大器a124优选为4路放大器,此时,模数变换器a125的数量对应的为八个,对于与低通滤波电路a122相连的4路放大器而言,其4路放大倍数分别为n1,a2n1,a2n1,a2n1,其中,n1为2~10,a为8~16;
[0129]
而对于与高通滤波电路a123相连的4路放大器而言,其4路放大倍数分别为n2,bn2,b2n2,b3n2,其中,n2为2~10,b为10~20;
[0130]
当然,并不排除采用其他大于4路的放大器,
[0131]
而在本发明中优选为4路的原因为:
[0132]
因为非接触式测量受导线排列,设备安装位置等影响,其测量范围需要足够大,既能兼顾很小的信号,又能兼顾很大的信号,还应兼顾安装及导线排列对测量范围的影响,所以采用多路,而实际使用中4路完全够用,但是低于4路则不行。
[0133]
实施例5
[0134]
如图1、图2、图3所示,本实施例为在实施例3的基础上所进行的进一步改进,其具体如下:
[0135]
电场信号调理及处理电路140包括:两个电压跟随器b141、加法器142、低通滤波电路b143、高通滤波电路b144、两个放大器b145和模数变换器b146;
[0136]
两个电压跟随器b141分别与电场传感器130两路电压信号输出相连;
[0137]
加法器142的输入分别与两个电压跟随器b141的输出相连;低通滤波电路b143与加法器142的输出相连,高通滤波电路b144与加法器142的输出相连,
[0138]
即加法器142合二为一的输出信号分别传输至低通滤波电路b143和高通滤波电路b144;
[0139]
两个放大器b145中的其中一个与低通滤波电路b143的输出相连,另一个与高通滤波电路b144的输出相连;
[0140]
每个放大器b145的每一路输出上均连接一个模数变换器b146;
[0141]
通常情况下,放大器b145优选为4路放大器,此时,模数变换器b146的数量对应的为八个,对于与低通滤波电路b143相连的4路放大器而言,其4路放大倍数分别为n1,a2n1,a2n1,a2n1,其中,n1为2~10,a为8~16;
[0142]
而对于与高通滤波电路b144相连的4路放大器而言,其4路放大倍数分别为n2,bn2,
b2n2,b3n2,其中,n2为2~10,b为10~20。
[0143]
当然,并不排除采用其他大于4路的放大器,
[0144]
而在本发明中优选为4路的原因为:
[0145]
因为非接触式测量受导线排列,设备安装位置等影响,其测量范围需要足够大,既能兼顾很小的信号,又能兼顾很大的信号,还应兼顾安装及导线排列对测量范围的影响,所以采用多路,而实际使用中4路完全够用,但是低于4路则不行。
[0146]
实施例6
[0147]
如图4、图5、图6所示,本实施例为在实施例2~5任一实施例的基础上所进行的进一步改进,其具体如下:
[0148]
磁场传感器110包括:圆柱棒胚体111、漆包线112、无感电阻r113以及外壳114;
[0149]
多根圆柱棒胚体111平行布置,圆柱棒胚体111的材质优选为高磁导率纳米晶;
[0150]
漆包线112绕制于每根圆柱棒胚体111上,所有圆柱棒胚体111上的漆包线112为一整根,当第一根圆柱棒胚体111上绕线完成后,接着在第二根圆柱棒胚体111上绕制,依次类推,直至所有圆柱棒胚体111都完成绕制,每根圆柱棒胚体111上绕制的匝数相同;
[0151]
在圆柱棒胚体111上绕线时需注意线圈方向,当漆包线112的正极注入电流时,通过右手螺旋定则判断圆柱棒胚体111中磁场方向,所有圆柱棒胚体111中磁场方向必须保持一致,即在导入电流后所有圆柱棒胚体111产生相同方向的磁场;
[0152]
所有圆柱棒胚体111绕制漆包线112后置于外壳114内,外壳114为铝合金材质,外壳114为空心长方体,其截面形状为正方形;
[0153]
漆包线112的正负极之间接一无感电阻r113,无感电阻r113上电压u0即为磁场传感器的输出,对于输电线路,r取值一般在5~50ω。
[0154]
通常情况下,圆柱棒胚体111的根数越多,漆包线112的绕线匝数对应就越多,可以更灵活的选择合适的匝数、积分电阻等等参数,来确定最佳输出,而在本实施例中,优选为4根,4根圆柱棒胚体111的长度及直径均相同,4根圆柱棒胚体111平行布置,且任意相邻两根圆柱棒胚体111之间的距离相等,4根圆柱棒胚体111底面圆心相连为正方形;
[0155]
当然,圆柱棒胚体111的根数也可以为1根,若为1根,其长度就需要设置得很长,对设备结构小型化设计不利。
[0156]
实施例7
[0157]
如图7所示,本实施例为在实施例2~6任一实施例的基础上所进行的进一步改进,其具体如下:
[0158]
电场传感器130包括:壳体131和两块金属极板132;
[0159]
两块金属极板132垂直布置,两块金属极板132中竖向金属极板132垂直于大地,并与三相导线平行,而两块金属极板132中水平向金属极板132与三相导线以及大地均保持平行,两块金属极板132的形状优选为矩形;
[0160]
两块垂直布置的金属极板132置于一上盖和下盖均为金属材质,且保持接地,但两侧侧板材质为abs阻燃材料的壳体131内,该壳体131内部形成局部电场屏蔽,可以防止雾水或雨水对传感器的影响,且能保证导线上三相电场能从两侧进入壳体131内部,并在两块金属极板132上形成悬浮电位,其中,在竖向金属极板132上形成悬浮电位u1,在水平向金属极板132上形成悬浮电位u2,其中,悬浮电位u1与u2的大小与三相导线上电压成正比。
[0161]
电场传感器130布置在输电线路三相导线正下方,其与导线之间距离d可根据实际情况灵活调整,一般建议5~20m为宜,非接触式故障监测终端1安装在杆塔上,壳体131的上盖、下盖与杆塔等电位连接,杆塔电位为参考0电位,同时是整个监测终端的gnd,电场传感器130采用该种设计,即使下雨,雨水在外壳131表面覆盖甚至短接外壳131表面,外壳131的电位始终为0,使得内部电场分布保持稳定;
[0162]
若不加外壳131,雨水将直接淋在金属极板132上,使得金属极板132表面形成桥接,严重影响分压比,使得测量失效;
[0163]
采用横竖两块金属极板132的目的是:一个感应电场水平分量,一个感应垂直分量,两个分量叠加然后求和,以增大输出,也即提升灵敏度。实施例8
[0164]
一种基于非接触式检测的输电线路分布式故障定位方法,包括如下步骤:
[0165]
s100、实时采集故障时三相导线上故障信号在周围空间产生的工频磁场信号、空间电场信号、行波磁场信号和行波电场信号;
[0166]
s200、对工频磁场信号、空间电场信号分别进行优选,以分别获得工频磁场目标信号数组和空间电场目标信号数组;
[0167]
s300、对工频磁场目标信号数组、空间电场目标信号数组分别进行重构,以分别获得工频磁场基波信号和空间电场基波信号;
[0168]
s400、根据工频磁场基波信号、空间电场基波信号判断该线路是否发生故障,若为是,则通过行波磁场信号、行波电场信号进一步定位故障点,若为否,则线路无故障。
[0169]
实施例9
[0170]
本实施例为在实施例8的基础上所进行的进一步改进,其具体如下:
[0171]
对工频磁场信号进行有效信号优选具体为:
[0172]
获取非接触式故障监测终端1各采集通道故障触发时所上传的多路工频磁场信号,并判断最后一路上传的磁场信号是否饱和,记为ad
n
,假设ad
n
对应的波形数组为y[n],自第一个数据点起,往后提取一个周期的数据长度n0,并计算有效值:
[0173][0174]
按照同样方式,依次从第二个点、第三个点
……
往后取n0长度计算有效值,依次得到e(2)、e(3)、e(4)
……
,当某一点往后数据点不足n0时,停止计算;
[0175]
依次判断e(1)、e(2)、e(3)
……
与的大小,其中e
′
为ad
n
通道量程幅值的绝对值,ε%为偏差系数;
[0176]
当任意时,认为该路信号饱和,反之当所有e(1)、e(2)、e(3)
……
都小于等于时,ad
n
路信号不饱和;
[0177]
若ad
n
饱和,则ad
n
路信号无效,则取ad
n
‑1信号进行饱和判断,若依然饱和,则进一步向前判断ad
n
‑2,直至找到第一个不饱和的信号,此时该信号作为目标信号,等待进入下一步
计算;
[0178]
重复上述过程,以获得工频磁场目标信号数组。
[0179]
通常情况下,工频周期为20ms。
[0180]
实施例10
[0181]
本实施例为在实施例9的基础上所进行的进一步改进,其具体如下:
[0182]
对工频磁场目标信号数组的重构具体为:
[0183]
依次计算以下复数:
[0184][0185][0186]
……
[0187][0188]
e为自然对数,j为复数单位,有j2=
‑
1;
[0189]
当上述公式起始点往后数据点不足n0时,停止计算;
[0190]
所计算的复数对应的相角依次为∠z(1)、∠z(2)、
……
、∠z(n);
[0191]
重构的工频磁场基波信号为y0,那么有:
[0192]
y0(1)=e(1)
×
cos∠z(1)
[0193]
y0(2)=e(2)
×
cos∠z(2)
[0194]
……
[0195]
y0(n)=e(n)
×
cos∠z(n)。
[0196]
实施例11
[0197]
本实施例为在实施例10的基础上所进行的进一步改进,其具体如下:
[0198]
故障判断:
[0199]
工频磁场目标信号数组e(1)、e(2)、e(3)
……
e(n)中最大值记为e
max
,最小值记为e
min
;
[0200]
从e(1)、e(2)、e(3)
……
e(n)依次遍历,找到满足下式的e值:
[0201][0202]
首次找到两个满足上式的e值,假设为e(m)和e(n),相应的工频磁场基波信号y中元素y(m)和y(n)对应的时间分别为t
n
,t
m
;
[0203]
若满足:|t
m
‑
t
n
|∈[20,100]
[0204]
则判断该线路发生故障,反之若所有工频磁场基波信号都不满足该式,则认为该线路未发生故障。
[0205]
实施例12
[0206]
本实施例为在实施例11的基础上所进行的进一步改进,其具体如下:
[0207]
故障点精确定位
[0208]
当判断出该线路发生故障时,则对判定为故障相关联的行波磁场信号和行波电场信号时间匹配的行波进行两两双端行波定位计算,得到故障点精确位。
[0209]
对于实施例8~12而言,对空间电场信号进行优选的方法与工频磁场信号进行优选的方法相同,故在此不进行详细赘述。
[0210]
而行波磁场信号和行波电场信号均不进行优选,即低频进行优选,而高频则不进行优选;
[0211]
对空间电场目标信号数组进行重构的方法与工频磁场目标信号数组进行重构的方法相同,故在此不进行详细赘述。
[0212]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1