一种扭摆式微小推力测量装置及方法
1.本发明涉及一种扭摆式微小推力测量装置,属于推进技术中的微小推力测量领域。
背景技术:
2.随着国际航天事业发展,卫星姿轨控、星际航行、深空宇航等领域对推力器的需求越来越大,性能要求也不断提升,更小分辨率、更高比冲的电推力器成为目前研究关注的重点。
3.精确测量空间电推力器推力是评估电推力器工作性能最重要的参数,空间电推力器通过高压放电产生推力范围一般在0~100mn之间。当被测推力范围在牛顿量级时,仪器装置和环境对推力测量的影响相对较小。然而随着推力水平的降低,尤其是当推力降到毫牛量级甚至微牛量级时,仪器装置和环境对推力测量的影响使推力的精确测量变得越来越困难。微推力的精确测量可以真实、直观地反映推进器电参数、介质参数变化引起的推力变化,从而为推进器的研制、设计、参数选择及性能评价提供必要的技术途径。
4.目前,常见的扭摆式微推力测量装置可分为2种:
5.1.悬丝扭摆装置(参见:cn103335769a,赵凤鸣等,一种电推进器弱力测量装置),其典型结构如图1所示,由一扭丝悬提的水平横梁、配重、位移或角度传感器和阻尼器等构成。通过利用磁场与通电导体的安培力产生标准弱力对扭摆的角位移进行标定,得到扭丝偏转角与扭矩间的对应关系。再根据推力器工作时测得的偏转,经过数学关系计算得到推力大小。
6.但悬丝扭摆装置扭丝的承重有限,难以定位,当随着微推进器对质量和体积的要求较大时,扭丝的限重和定位难等缺点限制了其使用。
7.2.挠性枢轴支撑的旋转摆臂扭摆装置(参见:亚微牛级推力测量系统设计及实验研究,杨超等,中国光学,2019,12(03),526
‑
534页),其典型结构如图2所示,与悬丝扭摆原理相似,也是根据力矩平衡建立悬梁偏转量与推力之间关系,通过传感器测量悬梁转动角度或位移,间接得到推力器推力大小,旋转摆臂安装孔固定,通过测量主要部件重量,计算预估所需配重块的重量来进行重心调节。
8.扭摆式推力架的优点是推力器的重力与推力有效分离,从而消除了推力器及扭摆自重对恢复力的影响;执行部件对纵向振动不敏感,通过调整摆臂的长度可以调整灵敏度和线性度。
9.但基于偏转位移测量的扭摆式推力架,其缺点和问题如下:
10.扭摆式推力架在每次安装或更换推力器或部件后,旋转摆臂的重心就会发生变化,需要重新配平,特别是对于配重块安装位置无法固定的梁结构,配重位置无法自由调节,配重重量很难精细到所需的计算值。旋转摆臂通过挠性枢轴或轴承与推力架支撑结构连接,摆臂的水平度主要依靠轴承座的加工和安装精度来保证,或是调节推力架整体框架结构的水平度来间接调节,轴承座仅起安装与固定作用,而仅依靠加工与安装精度不足以
保障扭摆臂的水平度。暂无可直接调节扭摆臂水平度的设计方案。电推力器工作需要推进剂供给和供电。这些管路和线路引起的附加拖拽力很大程度上影响着微小推力测量的线性度和准确性,电推力器与推进剂储供系统间靠管路连接,难免会干扰旋转摆臂的转动。尤其是所测量的推力越微小,影响越严重。目前采用柔性软管或是对连接管路后的推力架进行再标定等手段尽可能降低该影响,但并未完全消除。
技术实现要素:
11.本发明的目的在于克服现有技术的不足,提供一种无拖拽、易调节的扭摆式微小推力测量装置及方法。
12.本发明的技术方案如下:
13.一种扭摆式微小推力测量装置,具体结构为:
14.包括扭摆式推力架静架、旋转摆臂、h型枢轴安装座、挠性枢轴、电路桥接装置、液封导气连接件及配平校准件,其特征在于:所述静架搭建成龙门架式结构,安放于真空容器内,用于支撑整个测量装置;位移传感器、永磁铁固定到所述静架底部两根水平地梁上,安装位置可调节;所述旋转摆臂两端分别安装电推力器与阻尼平行铜板,所述旋转摆臂与所述静架之间通过挠性枢轴以及挠性枢轴上端的h型枢轴安装座连接;所述h型枢轴安装座设置于挠性枢轴上端并与旋转摆臂的下表面相连接以调节旋转摆臂的水平度;所述挠性枢轴通过紧定螺栓固定在h型枢轴安装座上;所述液封导气连接件下端安装在旋转摆臂上方;所述电路桥接装置下端安装在旋转摆臂侧面,并正对挠性枢轴中心;所述液封导气连接件上端、电路桥接装置上端安装于静架顶部横梁;所述配平校准件安装于正对挠性枢轴中心的旋转摆臂正上方。
15.优选地,所述测量装置还包括十字槽配重块安装座,配重安装于配重块安装座的位置能够自由调节。
16.优选地,所述配平校准件具有两条互相垂直的槽线,对旋转摆臂在长、宽两个方向上的重心进行校验。
17.优选地,所述h型枢轴安装座一端通过紧定螺栓连接挠性枢轴,另一端设置四个支撑臂;在所述四个支撑臂的末端安装孔与旋转摆臂之间加装预紧弹簧,通过调节所述预紧弹簧固定螺栓旋入深度即预紧弹簧压缩长度来调整旋转摆臂的水平度。
18.优选地,所述液封导气连接件包括上下两个互相嵌套的管道进行气体输送,上套管为进气套管包括进气接口,下套管为出气套管包括出气接口,两套管之间设置液封装置。
19.优选地,所述静架及旋转摆臂由铝型材制成。
20.一种采用扭摆式微小推力测量装置的微小推力测量方法,包括如下步骤:
21.步骤1:旋转摆臂重心调节,在所述旋转摆臂上安装好电推力器、平行铜板、电路桥接装置、h型枢轴安装座,并连接和固定电推力器供电线缆和供气管后,估算所需配重的质量,并选择加装在该质量区间内的配重数量,在正对挠性枢轴中心的旋转摆臂正上方安装配平校准件;将所述旋转摆臂倒置,使所述配平校准件的一条槽线置于水平悬丝上方;通过微调配重的前后安装位置,当旋转摆臂达到随遇平衡时,垂直于该槽线方向的重心调节校准完成;再将配平校准件的另一条槽线置于水平悬丝上方,进行相同操作;保证所述旋转摆臂的重心与轴心重合;
22.步骤2:旋转摆臂水平度调节,调整好配重后,将所述旋转摆臂上的h型枢轴安装座与挠性枢轴对接,通过紧定螺栓和定位孔进行固定;通过调节h型枢轴安装座四个支撑臂上的预紧弹簧固定螺栓旋入深度,即预紧弹簧压缩长度来调整旋转摆臂的水平度;
23.步骤3:推进剂供给,取下所述配平校准件,将液封导气连接件的下部出气接口固定到旋转摆臂上,而将上部进气接口对准后与静架固定,连接好进、出气接头管路;
24.步骤4:推力测量,调整、安装电路桥接装置、永磁铁、平行铜板、位移传感器,完成后进行电推力器的微小推力测量。
25.优选地,所述液封导气连接件采用硅油或液态金属密封,防止漏气的同时起到阻尼作用。
26.优选地,由永磁铁和平行铜板组成阻尼系统,利用涡流损耗原理抑制旋转摆臂的晃动,通过调节永磁铁与铜板的间距来调节系统阻尼比,根据实验测量来确定最佳阻尼比,即永磁铁与铜板的最佳间距。
27.与现有技术相比,本发明的扭摆式微小推力测量装置及方法的优势在于以下几点:
28.1、本发明的一种扭摆式微小推力测量装置及方法,可精准调控旋转摆臂的重心,使其与支撑挠性枢轴的轴线重合,保证推力力矩测量不受重力分量的影响,解决了现有技术中的旋转摆臂重心调节不便和调节可靠性不高的问题;
29.2、本发明的一种扭摆式微小推力测量装置及方法,扭摆式推力架能调节悬梁臂水平度,保证推力器推力在水平面内,消除重力对推力结果的测量,解决了现有技术中的旋转摆臂水平度调节的问题,简化设计,且方便实用;
30.3、本发明的一种扭摆式微小推力测量装置及方法,针对扭摆式推力架,设计电推力器气路供给的无拖拽连接装置,消除了电推力器气路供给管路对旋转摆臂直接作用力,结合基于液盒设计的电路桥接设计,实现无拖拽的微小推力扭摆测量,提高测量精度。
31.4、本发明的一种扭摆式微小推力测量装置及方法,推力架主体采用标准铝型材搭建,成本低;有配套的标准组装连接件,加工、安装与调整极为方便和快捷,可根据实际情况调节、替换、增添组件,适用性广,在其他微小推力测量系统中也可以参考和推广使用。
附图说明
32.图1为现有技术中的悬丝扭摆装置结构示意图;
33.图2为现有技术中的旋转摆臂扭摆装置结构示意图;
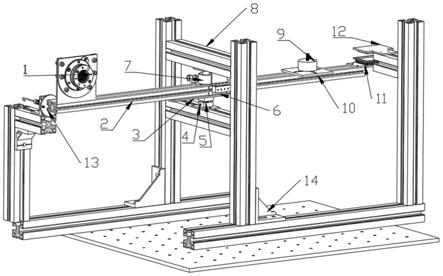
34.图3为本发明一种扭摆式微小推力测量装置整体结构示意图;
35.图4为本发明一种扭摆式微小推力测量装置的配平校准件结构示意图;
36.图5为本发明一种扭摆式微小推力测量装置的h型枢轴安装座结构示意图;
37.图6为本发明一种扭摆式微小推力测量装置的气路桥接装置结构示意图。
38.附表标记说明:
[0039]1‑
电推力器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑
旋转摆臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ3‑
h型枢轴安装座
[0040]4‑
紧定螺栓
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ5‑
挠性枢轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ6‑
电路桥接装置
[0041]7‑
液封导气连接件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ8‑
静架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ9‑
配重
[0042]
10
‑
配重块安装座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
‑
铜板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
‑
永磁铁
[0043]
13
‑
位移传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
‑
角件
具体实施方式
[0044]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0045]
本发明提出一种扭摆式微小推力测量装置,其具体结构如图3所示,包括:扭摆式推力架静架8和旋转摆臂2,静架8由6根铝型材搭建成龙门架式结构,安放于真空容器内,用于支撑整个测量装置;位移传感器13、永磁铁12通过铝型材固定到静架8底部两根水平地梁上,安装位置可根据需要进行随意调节。旋转摆臂2为一根铝型材,两端分别用于安装电推力器1与阻尼铜板11,旋转摆臂2与静架8之间通过挠性枢轴5以及挠性枢轴5上端的h型枢轴安装座3和下端的安装底座连接。h型枢轴安装座3设置于挠性枢轴5上端并与旋转摆臂2的下表面相接;h型枢轴安装座3通过紧定螺栓4固定挠性枢轴5,并可调节旋转摆臂2的水平度。液封导气连接件7下部安装在旋转摆臂2上方,电路桥接装置6下部安装在旋转摆臂2侧面,位置与挠性枢轴5中心正对;液封导气连接件7上部、电路桥接装置6上部安装在静架8最上方的横梁,分别与旋转摆臂2的正对。
[0046]
其中,配平校准件结构如图4所示,配平校准件具有两条互相垂直的槽线,可以对旋转摆臂2在长、宽两个方向上的重心进行校验。同时设计十字槽配重块安装座10,可自由调节配重9的安装位置。在安装或更换电推力器1、配重9以及其他部件后,将配平校准件安装到旋转摆臂2的正上方,使其中心与挠性枢轴5同心。将旋转摆臂2上的配平校准件的一条槽线置于悬丝上,再微调配重9的安装位置,使旋转摆臂2达到平衡,此时旋转摆臂2在该方向的重心调节校准完成。再将配平校准件的另一条槽线置于悬丝上,进行相同操作。即可保证旋转摆臂2的重心与轴心严格重合,可方便快速且可靠准确地调节推力架重心位置。
[0047]
其中,h型枢轴安装座3的结构如图5所示,h型枢轴安装座3一方面与挠性枢轴5通过紧定螺栓4来连接,另一方面在四个支撑臂的末端安装孔与旋转摆臂2之间加装预紧弹簧,通过调节预紧弹簧固定螺栓旋入深度即预紧弹簧压缩长度来调整旋转摆臂2的水平度。
[0048]
其中,液封导气连接件7的结构如图6所示,包括上下两个互相嵌套的管道进行气体输送,上套管为进气套管,下套管为出气套管,两套管之间设置液封装置;两套管间可采用液态金属等液体来液封防止漏气,同时起到阻尼作用,替代供气管与旋转摆臂上的电推力器直接连接。
[0049]
扭摆式微小推力测量装置的阻尼系统由永磁铁12和平行铜板11组成,利用涡流损耗原理抑制旋转摆臂2的晃动,通过调节永磁铁12与铜板11的间距来调节系统阻尼比,根据实验测量来确定最佳阻尼比,即永磁铁12与铜板11的最佳间距。
[0050]
本发明提出一种扭摆式微小推力测量方法,包括如下步骤:
[0051]
步骤1:旋转摆臂重心调节,在旋转摆臂2上安装好电推力器1、平行铜板11、电路桥接装置6、h型枢轴安装座3,并连接和固定电推力器1供电线缆和供气管后,估算所需配重9的质量,并选择加装在该质量区间内的配重9数量,在正对挠性枢轴5中心的旋转摆臂2正上方安装配平校准件。将旋转摆臂2倒置,使配平校准件的一条槽线置于水平悬丝上方。通过
微调配重9的前后安装位置,当旋转摆臂2达到随遇平衡时,垂直于该槽线方向的重心调节校准完成。再将另一条槽线置于水平悬丝上方,进行相同操作。保证旋转摆臂2的重心与轴心重合;
[0052]
步骤2:旋转摆臂水平度调节,调整好配重9后,将旋转摆臂2上的h型枢轴安装座与挠性枢轴5对接,通过紧定螺栓4和定位孔进行固定。通过调节h型枢轴安装座四个支撑臂上的预紧弹簧固定螺栓旋入深度,即预紧弹簧压缩长度来调整旋转摆臂2的水平度;
[0053]
步骤3:推进剂供给,取下配平校准件,将液封导气连接件7的下部出气接口固定到旋转摆臂2上,而将上部进气接口对准后与支撑架固定,用硅油密封,若是考虑油分子扩散污染真空舱,亦可用液态金属代替,连接好进、出气接头管路即可;
[0054]
步骤4:推力测量,调整、安装电路桥接装置6、永磁铁12、平行铜板11、位移传感器13,也可采用其他弱力产生装置或标准砝码对推力架进行标定,完成后即可进行电推力器的微小推力测量。
[0055]
以上所述之实施例仅为本发明的较佳实施例,并非对本发明做任何形式上的限制。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,利用上述揭示的技术内容对本发明技术方案作出更多可能的变动和润饰,或修改均为本发明的等效实施例。故凡未脱离本发明技术方案的内容,依据本发明之思路所作的等同等效变化,均应涵盖于本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1