一种智能驾驶能量消耗与续驶里程的测试系统及方法与流程
1.本发明涉及汽车测试技术领域,特别涉及一种智能驾驶能量消耗与续驶里程的测试系统及方法。
背景技术:
2.当今世界能源和环保问题日渐严重,为了解决此类问题,几乎所有国家都在寻找替代能源,新能源汽车由于其低排放而成为一种理想的选择。相对于传统家用乘用车,新能源乘用车的最大劣势是续驶里程问题,目前智能驾驶途中实际能量消耗与续航里程如何标定以及直观体现还存在问题,科学的对新能源汽车进行续驶里程和能量消耗量进行测试,可以很好的带动新能源汽车的发展。
技术实现要素:
3.有鉴于此,本发明实施例提供了一种智能驾驶能量消耗与续驶里程的测试系统及方法,保证能量消耗与续驶里程测试的准确性。
4.本发明实施例公开一种智能驾驶能量消耗与续驶里程的测试系统,包括数据采集装置和数据处理装置,数据采集装置包括载荷传感器模块、电流传感器、电压传感器和车速传感器,数据处理装置包括上位机和测试软件,数据采集装置和上位机软件组态,
5.载荷传感器模块用于采集智能驾驶道路载荷;
6.电流传感器用于采集智能驾驶过程中车辆的电流;
7.电压传感器用于采集智能驾驶过程中车辆的电压;
8.车速传感器用于采集智能驾驶过程中车辆的车速。
9.进一步的,上位机软件由labview编写。
10.进一步的,包括驱动层、测试层、主函数层;
11.驱动层对外部的传感器和上位机进行初始化以及设定组态,并且利用传感器读取测量值或者特定的资料;
12.测试层的子vi不可以互相呼叫,测试层中的每一个子vi都互相独立,完成测试子功能;
13.主函数层用于设定或者修改参数、对测试结果进行直观显示。
14.进一步的,数据采集装置采集车辆在变速过程和恒速过程中的电流、电压和车速。
15.本发明实施例还公开一种智能驾驶能量消耗与续驶里程的测试方法,包括以下步骤:
16.打开测试软件,数据采集装置与上位机自动进行初始化并进行组态;
17.组态成功后,数据采集装置自动采集智能驾驶道路载荷,智能驾驶过程车辆的电压、电流和车速,数据采集装置对测量值进行读取传输给上位机;
18.按照驱动层、测试层、主函数层三层结构,数据处理装置对传输的测量值进行处理,得到能量消耗值以及续驶里程,对处理数据进行图形化直观显示。
19.测量值处理如下:
20.根据以下公式计算出续驶里程ber,以及不符合cltc的能量消耗量ec与符合cltc的能量消耗量ec
dc
,
[0021][0022][0023]
ber为续驶里程,单位为千米(km);
[0024]
e
reess,ccp
为常规工况法测试前后,车载可充电储能系统即reess的电能变化量,单位为瓦时(wh);
[0025]
ec
dc
为基于reess电能变化量的能量消耗量,单位为瓦时每千米(wh/km);
[0026]
c为测试循环的序号;
[0027]
n为常规工况法测试结束后,车辆所行驶的完整的测试循环数量,不含未运行完成的测试循环;
[0028]
ec
dc,c
为基于reess电能变化量的第c个测试循环的能量消耗量,单位为瓦时每千米(wh/km);
[0029]
kc为第c个测试循环的权重系数。
[0030]
当车速小于乘用车循环工况时,智能驾驶消耗量为:
[0031][0032]
ec为基于从外部获取的能量消耗量,单位为瓦时每千米(wh/km);
[0033]
e
ac
为按照规定测量得到的来自外部的电量,单位为瓦时(wh)。
[0034]
当车速为乘用车循环工况时,智能驾驶过程中的电能消耗量为:
[0035][0036]
车辆测试结束后,车辆在2h内进行充电,充电方式应与测试前一致,当车载或外部仪器显示reess已完全充电时,判定为充电完成,来自外部的电量为e
ac
。
[0037]
采取交流充电方式时电量测量设备安装于车辆插头和供电设备之间;如果车辆仅有直流充电方式,或检验机构确定选择了直流充电方式,则电量测量设备安装于供电设备和电网之间。
[0038]
本发明实施例解决了智能驾驶途中对能量消耗与续驶里程的测试,操作简单,测试结果曲线显示,方便查看,数据特性清晰明了,保证了能量消耗与续驶里程测试的准确性。
附图说明
[0039]
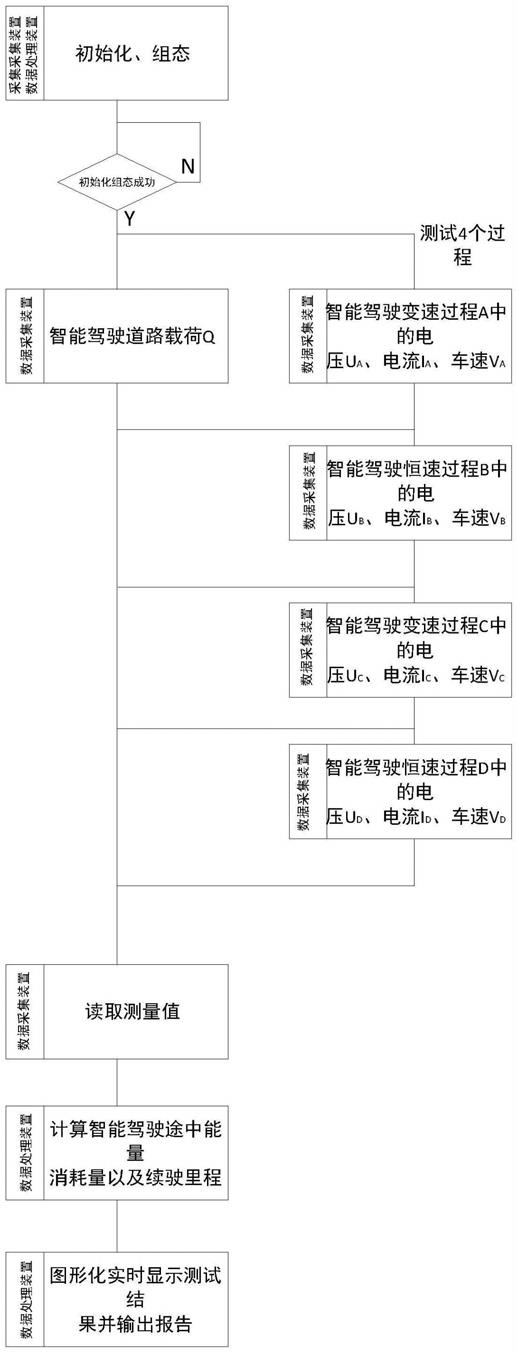
图1为本发明一实施例流程图。
[0040]
图2为本发明一实施例架构图。
具体实施方式
[0041]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0042]
本发明实施例公开一种智能驾驶能量消耗与续驶里程的测试系统,包括数据采集装置和数据处理装置,数据采集装置包括载荷传感器模块、电流传感器、电压传感器和车速传感器,数据处理装置包括上位机和测试软件,数据采集装置和上位机软件组态,
[0043]
载荷传感器模块用于采集智能驾驶道路载荷q;
[0044]
电流传感器用于采集智能驾驶过程中车辆的电流i;
[0045]
电压传感器用于采集智能驾驶过程中车辆的电压u;
[0046]
车速传感器用于采集智能驾驶过程中车辆的车速v。
[0047]
在本发明实施例中,上位机软件由labview编写。
[0048]
在本发明实施例中,包括驱动层、测试层、主函数层;
[0049]
驱动层对外部的传感器和上位机进行初始化以及设定组态,并且利用传感器读取测量值或者特定的资料;数据采集装置属于驱动层。
[0050]
测试层的子vi不可以互相呼叫,测试层中的每一个子vi都互相独立,完成测试子功能;
[0051]
主函数层用于设定或者修改参数、对测试结果进行直观显示。数据处理装置属于测试层和主函数层。
[0052]
在本发明实施例中,数据采集装置采集车辆在变速过程和恒速过程中的电流、电压和车速。本发明实施例的采集2种变速过程和2种恒速过程。即总共采集4种车辆运行状态的电流、电压和车速。
[0053]
本发明实施例还公开一种智能驾驶能量消耗与续驶里程的测试方法,包括以下步骤:
[0054]
打开测试软件,数据采集装置与上位机自动进行初始化并进行组态;
[0055]
组态成功后,数据采集装置自动采集智能驾驶道路载荷,智能驾驶过程车辆的电压、电流和车速,数据采集装置对测量值进行读取传输给上位机;
[0056]
按照驱动层、测试层、主函数层三层结构,数据处理装置对传输的测量值进行处理,得到能量消耗值以及续驶里程,对处理数据进行图形化直观显示。
[0057]
测量值处理如下:
[0058]
根据以下公式计算出续驶里程ber,以及不符合cltc的能量消耗量ec与符合cltc的能量消耗量ec
dc
,
[0059][0060][0061]
ber为续驶里程,单位为千米(km);
[0062]
e
reess,ccp
为常规工况法测试前后,车载可充电储能系统即reess的电能变化量,单位为瓦时(wh);
[0063]
ec
dc
为基于reess电能变化量的能量消耗量,单位为瓦时每千米(wh/km);
[0064]
c为测试循环的序号;
[0065]
n为常规工况法测试结束后,车辆所行驶的完整的测试循环数量,不含未运行完成的测试循环;
[0066]
ec
dc,c
为基于reess电能变化量的第c个测试循环的能量消耗量,单位为瓦时每千米(wh/km);
[0067]
kc为第c个测试循环的权重系数。
[0068]
本发明根据计算得到的实时智能驾驶能量消耗与续驶里程数据绘制出特性曲线(可按照需求定制化,比如横坐标为时间或横坐标为个数等),并输出报告(可按照需求定制化,比如可输出某个时间内的数据、测试人员及测试时间等)。
[0069]
当车速小于乘用车循环工况(cltc)时,智能驾驶消耗量为:
[0070][0071]
ec为基于从外部获取的能量消耗量,单位为瓦时每千米(wh/km);
[0072]
e
ac
为按照规定测量得到的来自外部的电量,单位为瓦时(wh)。
[0073]
当车速为乘用车循环工况时,智能驾驶过程中的电能消耗量为:
[0074][0075]
车辆测试结束后,车辆在2h内进行充电,充电方式应与测试前一致,当车载或外部仪器显示reess已完全充电时,判定为充电完成,来自外部的电量为e
ac
。采取交流充电方式时电量测量设备安装于车辆插头和供电设备之间;如果车辆仅有直流充电方式,或检验机构确定选择了直流充电方式,则电量测量设备安装于供电设备和电网之间。
[0076]
以上所述仅为本发明的较佳的手动驱动实施例而已,但其他驱动包括但不限于电机驱动及其其他的驱动源,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1