基于ROS的谐波雷达智能化探测系统和方法与流程
基于ros的谐波雷达智能化探测系统和方法
技术领域
1.本发明涉及机器人探测技术领域,具体地,涉及一种基于ros的谐波雷达智能化探测系统和方法。
背景技术:
2.谐波雷达是一种新型的非线性节点探测雷达,主要利用非线性目标的谐波再辐射特性,根据接收到的非线性目标的再辐射信号判别目标。传统的谐波雷达一般采用手持扫描,而且对操作人员专业性要求高,容易造成误差。并且传统的谐波雷达,没有成像功能,以探测目标的能量大小为主要判断依据,立体感不强,且对操作人员专业性要求高。本发明将ros(robot operating system,机器人操作系统)导航与谐波雷达相结合,进行路径规划扫描,并进行三维成像使得呈现的三维图像的谐波雷达地图更具立体感。更好的进行各种地面隐藏目标探测,包括窃听器、电子引信、定时爆炸物、地雷、未爆弹等带有pn结点的物体,适用于国防、安全、公安、港口等重要机关和部门。
3.专利文献cn106908771b(申请号:cn201710081095.8)公开了一种微波暗室中脉冲体制雷达目标探测模拟方法:第一步,利用间歇收发方式,获取目标回波信号:第二步,目标回波恢复:第三步,脉冲压缩获取目标信息;第四步,目标回波能量补偿信息重构。然而该专利谐波雷达一般采用手持扫描,容易造成误差,并且没有成像功能,以探测目标的能量大小为主要判断依据,立体感不强。
技术实现要素:
4.针对现有技术中的缺陷,本发明的目的是提供一种基于ros的谐波雷达智能化探测系统和方法。
5.根据本发明提供的基于ros的谐波雷达智能化探测系统,其特征在于,包括:pc端和谐波雷达探测agv机器人,所述谐波雷达探测agv机器人包括:谐波雷达、激光雷达、mcu中控和agv运动底盘;
6.所述pc端与谐波雷达探测agv机器人采用局域网通讯进行数据传输,所述谐波雷达、激光雷达、mcu中控和agv运动底盘采用串口进行通讯传输,基于ros系统的智能化谐波雷达对地面进行扫描,构建谐波雷达地图,进而进行目标检测。
7.优选的,所述pc端装有ros机器人系统,通过可视化攻击rviz显示建图、导航状况,以及三维全息图像。
8.优选的,所述激光雷达的测量距离为室内25m,扫描频率为16000次/秒,角度分辨率为0.3375,激光雷达放置在机器人上方20cm处,进行360
°
全方位扫描。
9.优选的,所述mcu中控发送运动指令给车辆底部控制板、发送采集指令给谐波雷达和激光雷达,并接收车辆底部控制板上传的里程计信息;
10.根据谐波雷达和激光雷达采集的数据建立激光雷达、谐波雷达对应的节点,并为ros系统提供的激光雷达消息格式,将各类数据传给pc端。
11.优选的,mcu中控的ros系统与激光雷达之间采用数据报文的通讯方式,ros系统发送请求报文,激光雷达发送返回报文,两者之间采用请求/应答模式,由ros系统首先发起,激光雷达启动后开始扫描工作,ros系统发送请求给激光雷达,激光雷达收到请求后再执行相关命令操作。
12.优选的,所述agv运动底盘包括车辆底层控制板、电机编码轮和四个全向轮,进行平台定位、导航和避障,当mcu中控的ros系统发送运动指令时,agv运动底盘通过pid控制算法进行相应运动。
13.优选的,所述谐波雷达用于数字调制波形,根据处理增益设置指令控制选择随机码本进行脉冲调制,并根据发射功率指令控制通过输出数据幅度调整实现发射信号功率调整精确控制。
14.优选的,所述谐波雷达用于谐波回波信号处理,包括本地相关信号获取与预处理、二次谐波回波信号采集与预处理,以及三次谐波回波信号采集、预处理、压缩和目标检测。
15.根据本发明提供的基于ros的谐波雷达智能化探测方法,执行包括:
16.步骤1:启动mcu中控和pc端的ros系统,配置局域网,通过安全外壳协议建立mcu中控与pc端之间的通讯;
17.步骤2:初始化agv运动底盘、激光雷达和谐波雷达,mcu中控的ros系统发送请求给激光雷达;
18.步骤3:mcu中控发送运动指令给车辆底部控制板,通过pid算法,控制agv运动底盘在室内行走,并上传里程计数据,同时mcu中控的ros系统请求激光雷达数据,激光雷达将采集室内数据以数据报文形式上传;
19.步骤4:mcu中控通过订阅的ros节点,接收到传输的里程计数据与激光数据,利用ros提供的功能包进行构建栅格地图,并在pc端利用ros工具包中的rviz可视化工具以可视化窗口形式进行显示;
20.步骤5:将建立好的室内栅格地图重新导入pc端的ros系统中,结合全局路径规划与局部路径规划法进行全覆盖路径规划,通过弓字型搜索进行全路径覆盖;
21.步骤6:当agv运动底盘进行完全遍历路径规划法运动时,控制谐波雷达工作,采集谐波雷达数据,并以激光雷达数据格式传回至mcu中控的ros系统中;
22.步骤7:mcu中控将传回的里程计数据与谐波雷达数据进行匹配关联,转化成直角坐标系,并传回pc端的ros系统中;
23.步骤8:待室内地图全部遍历完成后,运用matlab的surf函数和mesh函数,或是画网格曲面,将数据点在空间中描出,连成网格并将数据点所表示曲面画出,最终建立二维、三维立体的谐波雷达地图;
24.步骤9:根据三维地图的谐波雷达地图,进行各种地面隐藏目标探测,在探测完成后结束巡航。
25.优选的,agv运动底盘上传里程计信息包括位置、转角、前进速度和转向速度。
26.与现有技术相比,本发明具有如下的有益效果:
27.1、本发明实现了具有自主定位、自主导航及自主路径规划功能的谐波雷达智能化扫描系统,提高了工作人员对隐蔽目标的探测和定位的效率,可以进行大范围扫描;
28.2、本发明实现了谐波雷达特定重复关注区域的精细化扫描;
29.3、本发明建立具有全方位谐波雷达二维、三维地图,使得各种隐藏电子目标探测实现了可视化,更直观、快速、准确进行探测活动。
附图说明
30.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
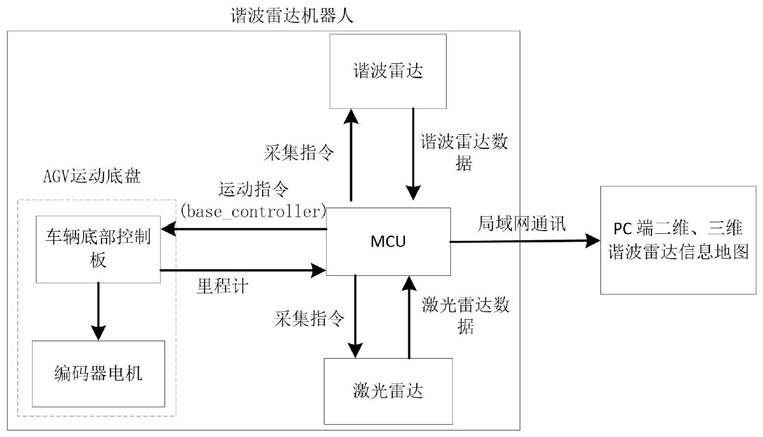
31.图1为本发明的架构图;
32.图2为谐波雷达系统框架图;
33.图3为整个工作流程图;
34.图4为弓字型搜索路径规划式示意图;
35.图5为改进版的路径规划式示意图。
具体实施方式
36.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
37.实施例:
38.如图1,是本发明基于ros系统的谐波雷达智能化探测方法架构图,该系统包括pc端、谐波雷达探测agv机器人,其中谐波雷达探测agv机器人包括:谐波雷达、激光雷达、mcu中控和agv运动底盘。
39.所述pc端与谐波雷达探测agv机器人采用局域网通讯进行数据传输,谐波雷达、激光雷达、mcu中控、agv运动底盘采用串口进行通讯传输,基于ros系统的智能化谐波雷达对地面进行扫描,构建谐波雷达地图,进而进行更准确、快速的目标检测,提高检测精度和扩宽应用范围。
40.介绍每部分的具体实现方式:
41.pc端:为一台装有ros kinetic kame机器人系统、matlab的笔记本,用rviz显示建图、导航状况,以及三维全息图像。
42.激光雷达:采用思岚科技(slamtec)的rplidara3激光雷达,其测量距离为室内25m,扫描频率:16000次/秒,角度分辨率为0.3375,激光雷达放置在机器人上方20cm出,保证360
°
全方位扫描。mcu的ros系统与雷达之间采用数据报文的通讯方式,ros系统发送请求报文,雷达发送返回报文,两者之间采用请求/应答模式,由ros系统首先发起,激光雷达启动后,核心测距模块就已经开始扫描工作,ros系统发送请求给激光雷达,激光雷达收到请求后再执行相关命令操作。
43.mcu中控,发送运动指令给车辆底部控制板、发送采集指令给谐波雷达和激光雷达;并接收车辆底部控制板上传的里程计信息,建立激光雷达、谐波雷达对应的节点,以及谐波雷达的幅度相位数据sensor_msgs/holoscan,以及激光雷达的数据为ros系统提供的最基础的激光雷达消息格式sensor_msgs/laserscan;并且将各类数据传给pc端。
44.agv运动底盘,由车辆底层控制板、电机编码轮、四个全向轮组成,完成了平台的定
位、导航、避障等基本功能,当mcu的ros系统发送运动指令,agv运动底盘通过pid控制算法进行相应运动。
45.图2为谐波雷达系统框架图,主要包括数字调制波形发生和谐波回波信号处理两个部分,其中数字调制波形根据处理增益设置指令控制来选择随机码本,然后完成脉冲调制,并根据发射功率指令控制通过输出数据幅度调整来实现发射信号功率调整精确控制。谐波回波信号处理单元包括本地相关信号获取与预处理、二次谐波回波信号采集与预处理以及三次谐波回波信号采集与预处理、相关压缩与目标检测等。
46.图3是基于ros系统的谐波雷达智能化探测方法的整个工作流程图,其步骤如下:
47.(1)初始化:启动mcu、pc端的ros系统,配置局域网,通过ssh(secure shell,安全外壳协议)建立mcu中控模块与pc端之间的通讯。
48.(2)初始化agv(automated guidedvehicle,自动导引运输车)运动底盘、激光雷达、谐波雷达,mcu的ros系统发送请求给激光雷达请求数据。
49.(3)中控模块发送运动指令给车辆底部控制板,通过pid算法,控制agv运动底盘在室内行走,并上传里程计数据,同时mcu的ros系统请求激光雷达数据,激光雷达将采集室内数据以数据报文上传。agv运动底盘上传里程计信息,一、是位姿(位置和转角),即(x,y,θ)二、是速度(前进速度和转向速度)。
50.(4)中控模块通过订阅的ros节点,接收到传输的里程计数据与激光数据,利用ros提供的slam_gmapping功能包,进行构建栅格地图,并在pc利用ros工具包中的rviz可视化工具rviz进行可视化窗口进行显示。
51.(5)将建立好的室内栅格地图,重新导入pc端的ros系统中,结合全局路径规划与局部路径规划法,实现全覆盖路径规划,实现全路径覆盖,进行弓字型搜索,像耕地一样一趟一趟得进行搜索。
52.(6)当运动底盘进行完全遍历路径规划法运动的时候,同时控制谐波雷达工作,采集谐波雷达数据,并通过sensor_msgs/holoscan传回mcu中控模块的ros系统中。
53.(7)mcu将传回的里程计数据与谐波雷达数据进行匹配关联,转化成直角坐标系,使得采集到的谐波雷达数据均有位置信息,并传回pc端的ros系统中。
54.(8)待室内地图全部遍历完成以后,运用matlab提供的surf函数和mesh函数,或是画网格曲面,将数据点在空间中描出,并连成网格,画完整曲面,将数据点所表示曲面画出,最终建立二维、三维立体的谐波雷达地图。
55.(9)根据三维地图的谐波雷达地图,进行各种地面隐藏目标探测。
56.(10)结束巡航。
57.所述配置局域网,包括但不仅限于通过随身wifi、路由器等,搭建无限通讯通道,便于使用者进行远距离操作监控。
58.所述中控模块,采用安装ros系统的x86架构的mcu,其体积小、重量轻、耗能低,适合搭载在移动机器人平台上,接收里程计信息、谐波雷达、激光雷达数据,下发运动与采集指令给车辆底部控制板、谐波雷达、激光雷达。
59.所述agv运动底盘,由车辆底层控制板、电机编码轮、四个全向轮组成,承载了平台的定位、导航、避障等基本功能,帮助机器人实现智能行走。
60.所述完全遍历路径规划法,移动机器人必须穿过所有目标区域内所有点,完成全
覆盖,并且覆盖的路径是连续且有序的,实现如耕地一样一趟一趟得进行搜索。
61.所述谐波雷达,由天线、发射射频前端、接受射频前端、系统控制单元和数据采集二维信号处理系统等几部分组成,搭载在agv运动底盘底部,发射雷达信号,接收发射电磁波,并接收发射回来的电磁波信号。
62.所述三维成像模块,将带有位置信息的谐波雷达数据与地图相结合,并运用matlab提供的进行三维地图绘制,最终绘制谐波雷达地图,实现对隐藏目标探测的目的。
63.图4为弓字型搜索路径规划式示意图,这种路径规划方法会在区域内耕地一样一趟一趟得进行搜索。这种路径规范,扫描效率高,且可以在完成区域扫描后回到原点。
64.图5为改进版本的路径规划,当存在障碍物时,通过合理的安排路径,高效的完成区域内精细化的扫描,且该路径规划方案以在多。
65.本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
66.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1