基于5G技术的室内定位方法与流程
基于5g技术的室内定位方法
1.本技术是以下专利申请的分案申请:
2.发明创造名称:基于5g技术的轮椅自动驾驶控制方法及自动驾驶轮椅
3.申请日:2020
‑
10
‑
27
4.申请号:2020111755706
技术领域
5.本发明的实施例涉及一种定位方法,具体而言,涉及基于5g技术的室内定位方法。
背景技术:
6.第五代移动通信技术(简称5g或5g技术)是最新一代蜂窝移动通信技术,也是继4g(lte
‑
a、wimax)、3g(umts、lte)和2g(gsm)系统之后的延伸。5g技术的性能目标是高数据速率、减少延迟、节省能源、降低成本、提高系统容量和大规模设备连接。itu imt
‑
2020规范要求速度高达20gbit/s,可以实现宽信道带宽和大容量mimo。
7.5g技术的其中一个重要应用领域为车联网,车联网技术经历了利用有线通信的路侧单元(道路提示牌)以及2g/3g/4g网络承载车载信息服务的阶段,正在依托高速移动的通信技术,逐步步入自动驾驶时代。根据中国、美国、日本等国家的汽车发展规划,依托传输速率更高、时延更低的5g网络,将在2025年全面实现自动驾驶汽车的量产。
8.然而,谈及自动驾驶技术,公众想到最多的应该是汽车,但是如果将5g技术和自动驾驶技术应用到轮椅中,使得提升现有轮椅的智能性,对肢体伤残者和行动不便人士或许能提供更大的帮助。
9.目前轮椅使用场景更多是在室内,而室内定位是卫星定位的一个盲点,因此如何进行准确的室内定位是自动驾驶的重要一步。
技术实现要素:
10.本发明的目的在于针对现有技术中的上述缺陷,提供一种基于5g技术的室内定位方法。
11.为实现上述发明目的,本发明采用了如下技术方案:
12.一种基于5g技术的室内定位方法,包括:
13.在室内布设至少4个5g微基站,其中一个5g微基站安装在电梯出入口处,其余5g微基站分散安装在室内,利用5g模组接入移动互联网、并获取室内地图信息,利用5g模组与电梯出入口处的5g微基站无线通信、并确定轮椅所在楼层,利用5g模组与所在楼层的至少3个5g微基站无线通信,并确定轮椅当前位置坐标;
14.其中,利用5g模组与电梯出入口处的5g微基站无线通信、并确定轮椅所在楼层,利用5g模组与所在楼层的至少3个5g微基站无线通信,并确定轮椅当前位置坐标包括:
15.a)当轮椅进入5g微基站的覆盖区域内时,5g模组与5g微基站进行无线通信,5g微基站向5g模组发送位置识别信号,位置识别信号内容包含:楼栋编号、楼层编号、伪距信号
和位置坐标信号;
16.b)5g模组根据接收到的信号的强度值选择距离最近的5g微基站判定为电梯出入口处的5g微基站,根据该电梯出入口处的5g微基站发出的位置识别信号中的楼栋编号和楼层编号确定当前所在楼栋和楼层;
17.c)5g模组根据楼层编号,选择含有相同楼层编号的位置识别信号为有用信号,根据被选择的位置识别信号中的伪距信号和位置坐标信号,并基于rssi极大似然估计定位算法计算轮椅当前位置坐标,并采用最小二乘法进行优化求解,求解方法为:
18.定义三个5g微基站的位置坐标分别为(x1,y1),(x2,y2),(x2,y2),5g模组的位置坐标为(x,y),三个5g微基站与5g模组的距离分别为d1、d2、d3,
19.建立以下方程组:
[0020][0021]
用上述的前n
‑
1个方程依次减去第n个方程,可以得到如下的矩阵表示形式:
[0022]
ax=y;
[0023]
其中:
[0024][0025][0026]
采用最小二乘求解,可以得到x=(a
t
a)
‑1a
t
y,x便是5g模组的坐标计算值;
[0027]
d)5g模组通过5g网络接入移动互联网并获取室内地图信息,室内地图信息为预先上传至云数据库的地图数据,5g模组访问云数据库读取室内地图信息,并根据位置识别信号中的楼栋编号和楼层编号下载相应的室内地图信息。
附图说明
[0028]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例或相关技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅涉及本发明的一些实施例,并非对本发明的限制。
[0029]
图1是基于5g技术的自动驾驶轮椅的系统框图。
[0030]
图2是四个5g微基站的安装示意图。
[0031]
图3是can总线模块的电路图。
[0032]
图4是语音交互模块的电路图。
[0033]
图5是转向同步组件的结构示意图。
[0034]
图6是转向驱动组件其中一个实施例的结构示意图。
[0035]
图7是转向驱动组件另一个实施例的结构示意图。
[0036]
图8是行进执行机构的结构示意图。
[0037]
图9是差速器的结构示意图。
[0038]
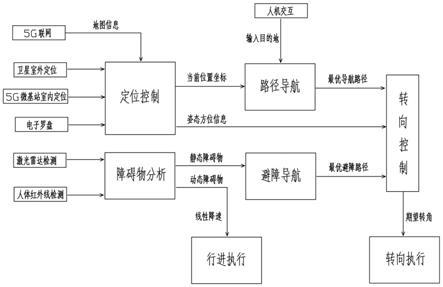
图10是轮椅自动驾驶控制方法的系统框图。
[0039]
图11是轮椅自动驾驶控制方法的流程图。
具体实施方式
[0040]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明技术方案作进一步非限制性的详细描述。
[0041]
由于轮椅的使用场景有一定限制性,而且行驶路径和路面情况也比较简单,本实施例的轮椅主要使用场景在医院,基于以上特点,本实施例针对轮椅的自动驾驶做出详细描述。
[0042]
本实施例公开一种基于5g技术的自动驾驶轮椅,见图1,其主要包括:行进执行机构6、转向执行机构7和自动驾驶控制组件。自动驾驶控制组件又主要包括定位导航模块1、避障控制模块2、路径跟踪控制模块3、can总线模块4和人机交互模块5。
[0043]
定位导航模块1用于获取其当前位置信息、姿态方位角和地图信息,并通过执行蚂蚁算法输出最优导航路径。定位导航模块1包括安装在轮椅本体上的卫星导航接收器10、5g模组11、第一微处理器12和电子罗盘13,以及分散安装在室内的至少四个5g微基站。
[0044]
卫星导航接收器10采用的是s1216f8
‑
bd型号的双模卫星导航接收器(北斗、gps),该接收器通过串口与第一微处理器12耦接,第一微处理器12采用的是stm32型单片机。卫星导航接收器10与导航卫星通信,在接收到卫星信号后将所接收到的卫星信号处理成字段头为$gprmc的nmea0183标准格式报文,并通过串口发送给第一微处理器12。
[0045]
5g模组11采用华为公司的5g车载模组mh5000,其通过串口与第一微处理器12耦接。5g模组11通过5g网络接入移动互联网,访问地图数据库并实时下载地图信息,地图信息包括卫星地图信息和室内地图信息,并通过串口发送给第一微处理器12。
[0046]
本实施例选用四个5g微基站,分别是第一基站14a、第二基站14b、第三基站14c和第四基站14d。见图2,第一基站14a安装在电梯出入口处,第二基站14b、第三基站14c和第四基站14d分散安装在同一楼层内,该四个5g微基站可分别基于5g通信协议与5g模组进行无线通信,并分别向5g模组发送室内位置信息,室内位置信息内容包含:楼栋编号、楼层编号、伪距信号和位置坐标信号;5g模组11将室内地图信息和室内位置信息转送给第一微处理器12,第一微处理器12可基于rssi极大似然估计定位算法计算出室内位置坐标。
[0047]
第一微处理器12将卫星导航接收器10报文分割成以导航语句为基本单元的多个片段,然后在相应的数据域的对应字段中提取导航的定位参数,并对一部分数据进行数据转换,完成导航数据的解析,并通过执行蚂蚁算法输出最优导航路径。另外,第一微处理器12基于其计算出的室内位置坐标,同样通过执行蚂蚁算法输出最优导航路径。
[0048]
电子罗盘13采用lp3200
‑
232eab
‑
d50型号高精度平面电子罗盘,计算轮椅本体当前的姿态方位角,即罗盘指北轴线在水平面的投影和地磁北线在地面投影的夹角,然后通过rs232接口发送给第一微处理器12,在由第一微处理12打包处理后经can总线模块4发送
给路径跟踪控制模块3
[0049]
避障控制模块用于检测行进路径前方的动态障碍物和静态障碍物,并执行人工势场法输出最优避障路径。动态障碍物主要是行人,静态障碍物主要是临时摆放的固体物质(比如仪器设备,箱体等),基于轮椅的使用场景分析,在行进路径上遇到动态障碍物的概率较大。避障控制模块包括第二微处理器20、激光雷达传感器21和人体红外传感器22,其中的激光雷达传感器21安装在轮椅本体的前端并位于左扶手下方,人体红外传感器22安装在轮椅本体的前端并位于右扶手的下方,激光雷达传感器21和人体红外传感器22均与第二微处理器20耦接。本实施例,激光雷达传感器21采用为德国西克(sick)牌的lms111激光扫描雷达,通过串口向第二微处理20实时传输数据,用于障碍物测量和防撞。本实施例,人体红外传感器22采用型号为hc
‑
sr501的人体红外感应模块,通过串口向第二微处理20实时传输数据,用于探测人体辐射。本实施例,第二微处理器20同样采用stm32型单片机,接收激光雷达传感器21和人体红外传感器22的数据,并首先判断障碍物类型,然后依据人工势场法计算输出最优避障路径。第二微处理器20通过can总线模块3与路径跟踪控制模块3耦接,将最优避障路径的数据发送给路径跟踪控制模块3。
[0050]
路径跟踪控制模块3包括第三微处理30和角度传感器31,第三微处理器30内置有自适应模糊pid控制器,自适应模糊pid控制器主要由模糊控制器321、pid控制器322和限幅器323组成。第三微处理器30通过can总线模块3接收到当前位置坐标(室外位置坐标或室内位置坐标)、当前姿态方位角、最优导航路径和最优避障路径,并将当前位置坐标与最优导航路径或最优避障路径进行比对计算得到横向偏差,将当前姿态方位角与最优导航路径或最优避障路径进行对比计算得到航向角偏差,两个偏差值被输入到自适应模糊pid控制器中执行模糊自适应pid算法计算输出期望转角,期望转角通过串口传送给转向执行机构。期望转角实为脉冲信号。
[0051]
角度传感器31用于实时采集所述转向执行机构转动的转角值,其采用北京通磁伟业公司的wyt
‑
at
‑3‑
360无触点角度传感器,为电流输出型传感器,其电流信号经电流环接收芯片rcv420转换成电压信号,再经过op07放大电路将电压按比例转换成0~3.3v后送入第三微处理器30,最终传送给自适应模糊pid控制器,作为pid控制反馈。
[0052]
见图3,can总线模块4包括can
‑
bus和若干个外接的监控节点,每个监控节点都包括philip公司的tja1050tcan总线驱动芯片u5和外围抗干扰电路。外围抗干扰电路包括耦接在总线驱动芯片u5的rxd端的第一光耦u6,以及耦接在总线驱动芯片u5的txd端的第二光耦u4,第一光耦u6和该第二光耦u4的va、vb通过dc
‑
dc模块或者带有多个隔离输出的开关电源进行隔离。can总线模块3是基于iso11783标准的can总线技术,通过can总线连接各个网络节点,形成多主机控制器局域网。
[0053]
人机交互模块与第一微处理12耦接,其包括语音识别模块和触摸屏模块,语音识别模块主要用于语音输入终点,触摸屏模块主要用于手动输入终点和显示行驶路径。其中,见图4,语音识别模块包括话筒mk1、语音放大电路(lm386型芯片u1及其外围电路)和音频信号调制器(lm567型芯片u2及其外围电路),音频信号调制器的输出端耦接第一微处理器12。
[0054]
转向执行机构包括两个转向轮(前轮)、转向同步组件和转向驱动组件。见图5,转向同步组件包括固定杆60、平动杆61、第一连接件62、第二连接件63、第一连杆64、第二连杆65和固定架66。固定杆60和固定架66固定配接,呈长方形桁架结构,而该桁架结构与轮椅本
体固定连接,用于将整个转向执行机构固定安装在轮椅本体下方前端。第一连接件62和第二连接件63的截面大致呈“匚”形,并分别铰接在固定杆60的两端,其外侧分别通过转轴和轴承与两个转向轮50、51一对一配接。在第一连接件62上设置有第一支杆67和第二支杆68,在第二连接件63上设置有第三支杆69,第一支杆67和第三支杆69分别与平动杆61的两端铰接,第二支杆68与第一连杆64的其中一端铰接,第一连杆64的另一端与第二连杆65的其中一端铰接,第二连杆65的另一端则与转向驱动组件配接。见图6,转向驱动组件包括驱动电机70、主动轮71、从动轮72和输出轴73。驱动电机70为直流步进电机,其与第三微处理30耦接,用于接收自适应模糊pid控制器输出的期望转角(脉冲信号),由期望转角控制其角位移(即角度)。驱动电机70通过其电机轴与主动轮71相固定配接,主动轮71又与从动轮72相啮合,而从动轮72与输出轴73的其中一端相固定配接,输出轴73的另一端与第二连杆65相固定配接。
[0055]
本实施例的转向执行机构的执行过程为:驱动电机70
‑
主动轮71
‑
从动轮72
‑
输出轴73
‑
第二连杆65
‑
第一连杆64
‑
第一连接件62
‑
平动杆61
‑
第二连接件63,通过齿轮和连杆结构,实现了转向驱动和转向同步。
[0056]
见图7,为了提供手动控制转向的应急功能,还提供另一实施例的转向驱动组件。转向驱动组件包括驱动电机70、主动轮71、从动轮72、输出轴73、拉杆74、转向杆75、手动转向齿轮76和套环77。驱动电机70为直流步进电机,其与第三微处理30耦接,用于接收自适应模糊pid控制器输出的期望转角(脉冲信号),由期望转角控制其角位移(即角度)。驱动电机70通过其电机轴与主动轮71相固定配接,主动轮71又与从动轮72相啮合,而从动轮72可滑动地套装在输出轴73的上端部,输出轴73的下端部与第二连杆65相固定配接。手动转向齿轮76套接在转向杆75的下端部,并且位于从动轮72的上方,可以与从动轮72选择性啮合,即,从动轮72可沿输出轴73滑动地切换与手动转向齿轮76啮合。在从动轮72上方设置有环槽部78,套环77可旋转地套设在环槽部78外,拉杆8的下端固定连接在套环77上。当需要调节为手动转向时,拉动拉杆74,从动轮72上升并与手动转向齿轮76啮合,转动转向杆75即可实现手动控制转向。
[0057]
本实施例的转向执行机构的增加了手动转向功能,其与电动转向的不同之处仅在于:动力由转向杆75输入,并经手动转向齿轮76带动从动轮72,从而带动输出轴73。本实施例的手动控制转向仅为应急措施。
[0058]
见图8,行进执行机构包括两个行进驱动轮80a、80b(后轮)、行进驱动电机81和差速器82。行进驱动电机81为直流伺服电机,其与第二微处理20耦接,受第二微处理20逻辑控制其转速和转矩。见图9,差速器包括壳体,以及设置在壳体内的主动锥齿轮821、从动锥齿轮822、行星轮架823、两个行星轮824和两个太阳轮825。两个行星轮824相互对称设置,并分别通过轴承连接在行星轮架823内;两个太阳轮825相互对称设置,并分别与两个行星轮824相啮合,两个行进驱动轮80a、80b分别通过左轮轴826和右轮轴827与两个太阳轮825一对一相固定配接;从动锥齿轮822固定套接在其中一根轮轴(本实施例是左轮轴826)上;主动锥齿轮821与行进驱动电机81的电机轴相配接,并且与从动锥齿轮822相啮合。
[0059]
本实施例的行进执行机构通过设计差速器实现一个电机控制行进,同时实现平稳转向。
[0060]
见图10和图11,本实施例还提供一种基于5g技术的轮椅自动驾驶控制方法,该控
制方法与上述的“基于5g技术的自动驾驶轮椅”相适应,具体地,其包括如下步骤:
[0061]
1)定位控制,包括:室外定位和室内定位,
[0062]
1.1)室外定位的方法为:卫星导航接收器与导航卫星通信,通过卫星定位获取轮椅当前位置坐标。5g模组通过5g网络接入移动互联网并获取室外地图信息,该室外地图信息可通过触摸屏模块进行实时显示,显示界面为地图2d界面,具体可调用高德地图或百度地图接口,当前位置坐标在地图2d界面实时显示。电子罗盘进行方向定位、并获取轮椅姿态方位角。
[0063]
1.2)室内定位的方法为:
[0064]
a)在室内布设4个5g微基站,其中一个5g微基站安装在电梯出入口处,其余三个5g微基站分散安装在室内。如果室内面积较大,隔间较多,可以适当增加5g微基站数量。当轮椅进入5g微基站的覆盖区域内时,5g模组与5g微基站进行无线通信,所有5g微基站都可以向5g模组发送位置识别信号,位置识别信号内容包含:楼栋编号、楼层编号、伪距信号和位置坐标信号。伪距信号指的是:向5g模组发送信号的5g微基站与5g模组之间的大概距离。位置坐标信指的是:5g微基站其本身固定的位置坐标。
[0065]
b)由于目前的轮椅不具备爬梯功能,因此目前所有的轮椅想要上楼必须依靠电梯,因此可以设定逻辑判断:5g模组根据接收到的位置识别信号中的伪距信号选择距离最近的5g微基站判定为电梯出入口处的5g微基站,根据该电梯出入口处的5g微基站发出的位置识别信号中的楼栋编号和楼层编号确定当前所在楼栋和楼层。
[0066]
c)5g模组接收并保存多个5g微基站的位置识别信号,并根据楼栋编号和楼层编号,选择含有相同楼栋编号和楼层编号的位置识别信号为有用信号,其余信号进行丢包。根据被选择的三个5g微基站的位置识别信号中的伪距信号和位置坐标信号,第一微处理器基于rssi极大似然估计定位算法中的三角定位算法计算出5g模组的位置坐标,即,轮椅的当前位置坐标。三角定位算法为,假设三个5g基站到5g模组的距离分别为r1,r2,r3,则以三个基站坐标为圆心,以三个基站到5g模组的距离为半径可以画出三个相交的圆,5g模组的位置坐标即为三圆相交点。
[0067]
但是,在实际测量中,往往由于测量的误差,使三个圆并不交于一点,而相交于一块区域,可以再采用最小二乘法进行优化求解。
[0068]
假设三个5g微基站的位置坐标分别为(x1,y1),(x2,y2),(x2,y2),5g模组的位置坐标为(x,y)。三个5g微基站与5g模组的距离分别为d1、d2、d3。
[0069]
建立以下方程组:
[0070][0071]
用上述的前n
‑
1个方程依次减去第n个方程,可以得到如下的矩阵表示形式:
[0072]
ax=y;
[0073]
其中:
[0074][0075][0076]
采用最小二乘求解,可以得到x=(a
t
a)
‑1a
t
y,x便是5g模组的坐标计算值。
[0077]
d)5g模组通过5g网络接入移动互联网并获取室内地图信息,该室内地图信息可通过触摸屏模块进行实时显示,显示界面为地图2d界面。室内地图信息为预先上传至云数据库的地图数据,5g模组访问云数据库读取室内地图信息,并根据位置识别信号中的楼栋编号和楼层编号下载相应的室内地图信息。
[0078]
e)电子罗盘进行方向定位、并获取轮椅姿态方位角。
[0079]
2)路径导航控制,包括:
[0080]
2.1)通过语音识别模块或触摸屏模块输入目的地,该目的地应该是选择项,即,只能选取系统内存储的目的地。
[0081]
2.2)将步骤1)确定的轮椅当前位置信息作为起点,输入的目的地作为终点,第一微处理执行蚂蚁算法进行路径规划,输出最优导航路径(全局路径规划)。蚂蚁算法是设定一个起点,其他的都是需要拜访的点,所有点设为一个数组,循环设置每个点为起点,5g模组通过5g网络接入移动互联网并调用高德api获取这个点与其他各点之间的距离,自身点设为无穷大,获取到的是一个二维数组,为了性能,调用的是高德api的批量接口,防止频繁请求接口,得到的二维数组既是一个点与各个点之间的距离,通过模拟蚂蚁算法,得到最优解。
[0082]
3)避障导航控制,包括:
[0083]
3.1)利用激光雷达和人体红外线进行障碍检测,根据检测结果进行障碍物判断。对第二微处理进行逻辑设定,即,激光雷达和人体红外均检测到的物体定义为动态障碍物,激光雷达检测到、人体红外未检测到的物体定义为静态障碍物。激光雷达还用于障碍物测量和防撞控制。
[0084]
3.2)如果是静态障碍物,则采取主动避让方式(即轮椅主动避让静态障碍物)。根据激光雷达测量到的障碍物的距离及其所在方位,第二微处理器执行人工势场法对障碍物产生斥力,得出无碰撞的引力引导下的最优避障路径(局部路径规划);所述方位包括正前方、左前方和右前方。
[0085]
人工势场包括引力场和斥力场,其中目标点对物体产生引力,引导物体朝向其运动,障碍物对物体产生斥力,避免物体与之发生碰撞,物体在路径上每一点所受的合力等于这一点所有斥力和引力的和。
[0086]
3.3)如果是动态障碍物,则采取被动避让方式(即动态障碍物主动避让轮椅)。当检测到动态障碍物在正前方2
‑
3米处时,第二微处理器则控制行进执行机构线性降速;当检测到动态障碍物在正前方1
‑
2米处时,第二微处理器则控制行进执行机构由线性降速直至
停止。当激光雷达和人体红外线检测到动态障碍物转移至左前方或右前方,或者距离轮椅正前方大于3米时,第二微处理器则控制行进执行机构线性提速直至额定转速。当激光雷达测量到动态障碍物距离1米以内,并且该动态障碍物无位移时,则将该动态障碍物转认定为静态障碍物,操作3.2步骤;
[0087]
4)转向控制,包括:
[0088]
4.1)在第三微处理器内运行计算,将步骤2.2的最优导航路径或者步骤3.2的最优避障路径,与轮椅当前位置坐标和当前姿态方位角进行比对,得到横向偏差e和航向角偏差θ
e
,将两个偏差输入到内置在第三微处理器内的自适应模糊pid控制器中,控制器通过执行模糊自适应pid算法计算输出期望转角,其中,
[0089]
横向偏差的计算方法,包括:
[0090]
a)在最优导航路径或最优避障路径上取a、b两点,a、b两点连线为路径参考线;
[0091]
b)轮椅当前位置为d点,通过步骤1.1和步骤1.2确定d点的位置坐标;
[0092]
c)横向偏差e等于d点到路径参考线ab的垂线段距离l;
[0093]
航向角偏差的计算方法,包括:
[0094]
a)在最优导航路径或最优避障路径上取a、b两点,a、b两点连线为路径参考线,计算出路径参考线ab与中央子午线正北方的第一夹角θ1;
[0095]
b)轮椅当前位置为d点,通过步骤1.1和步骤1.2确定d点的位置坐标;
[0096]
c)根据电子罗盘的姿态方位角计算出当前行进方向与中央子午线正北方的第二夹角θ2;
[0097]
d)航向角偏差θ
e
等于第一夹角θ1和第二夹角θ2相减得到的值;
[0098]
模糊自适应pid算法的步骤,包括:
[0099]
a)输入变量模糊化,输入变量包括横向偏差e和航向角偏差θ
e
,其中,
[0100]
设定横向偏差e的基本论域为[
‑
12cm,12cm],给定量化因子k
d
为2,量化论域为[
‑
6,
‑
5,
‑
4,
‑
3,
‑
2,
‑
1,0,1,2,3,4,5,6];
[0101]
设定航向角偏差θ
e
的基本论域为[
‑
18
°
,18
°
],给定量化因子k
e
为3,量化论域为[
‑
6,
‑
5,
‑
4,
‑
3,
‑
2,
‑
1,0,1,2,3,4,5,6];
[0102]
b)定义输入和输出隶属度函数,对模糊控制的输入和输出变量均采用三角形隶属度函数,其中输出变量为期望转角θ
u
;
[0103]
c)建立模糊规则,包括:对横向偏差e、航向角偏差θ
e
、期望转角θ
u
各定义7个模糊子集,并分别表示为[nb,nm,ns,ze,ps,pm,pb],制定模糊规则如下:
[0104]
[0105][0106]
d)模糊推理,在模糊控制器中进行,设置模糊逻辑推理类型为mamdani型,模糊逻辑推理的各参数设置如下:
[0107]
参数设置值and methodminor methodmaximplicationminaggregationmaxdefuzzificationcentroid
[0108]
e)反模糊化,包括:找到输出隶属度函数曲线与坐标轴的横轴所围成面积的重心,将这个重心作为输出变量的代表点,对输出范围内几个连续点的重心进行计算,最终得出确定的控制量;
[0109]
f)pid运算,将步骤e)得出的控制量输入pid控制器中,经pid运算后得出期望转角;
[0110]
g)限幅输出,将步骤f)得出的期望转角输入限幅器中,对期望转角限幅输出,其中,限幅器设置输出上限幅为15
°
,下限幅为
‑
15
°
。
[0111]
4.2)转向执行机构将期望转角执行为实际转角;
[0112]
4.3)实时检测转向执行机构的实际转角,并作为自适应模糊pid控制器的反馈,实时校正期望转角,控制轮椅行驶至目的地。
[0113]
需要指出的是,上述较佳实施例仅为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1