一种快速测量船舶高度的装置、船舶超高预警系统及方法
1.本发明属于船舶航行安全及电子信息技术领域,尤其涉及船舶航经不同限高水域时的超高主动预警方法,具体为一种快速测量船舶高度的装置、船舶超高预警系统及方法。
背景技术:
2.跨水桥梁作为连接两岸的重要枢纽,对交通运输业的发展起着重要作用。近年来,跨水桥梁特别是内河桥梁数量显著增加,仅长江干线已建通航桥梁就达115座,跨水架空线的数量也在不断增加。与此同时,桥梁/架空线对船舶通航带来了诸多约束,由于部分早期建设的桥梁/架空线通航净空尺度较小等原因,在船舶大型化的发展趋势下,由于船舶超高触碰桥梁/架空线的险情事故时有发生。经分析,其主要原因是船舶驾驶员对桥梁/架空线的通航净空高度尺度估计不足、瞒报船舶实际吃水或船舶高度、私自改造船舶上部结构(加高桅杆、信号杆等)等。
3.根据《内河通航标准》和《海轮航道通航标准》,通航净空高度为跨越航道建筑物、构筑物的通航孔通航范围内从满足通航要求的建筑物最低点至设计最高通航水位间的垂直距离。若要保证船舶通航安全,船舶水线以上至最高固定点高度必须要小于桥梁/架空线的通航净空高度。船舶通过限高水域前,海事监管部门掌握船舶水线以上高度尤为重要。
4.通常,受水位调控、汛期、潮汐等因素影响,航道实际水位会有一定的变化,船舶不同装载状态下的吃水也会影响到船舶水线以上高度,加之部分区域桥梁/架空线众多、尺度不一、水流复杂等原因,船舶在桥区/架空线区通航风险越发突显。如何准确掌握不同装载状态下船舶水线以上高度,快速筛选超高船舶并能自动跟踪,是监管部门关注的重点。
5.通航水域桥梁主要借助安装桥梁助航标志、警示牌等为船舶提醒、助航,也有的在桥区水域设置橡胶、浮球等实体防撞装置进行被动式防撞。由于被动式防撞装置一般设置于桥梁以外一定距离或者重点保护某个桥墩,船舶与桥梁顶部、桥墩发生触碰或即将发生碰撞时,被动式防撞装置难以起到有效防护。还有研究利用红外和可见光成像探测、超声波和红外线复合探测、视频处理技术、ais 数据统计分析及轨迹预测等方法自动检测运动船舶目标的主动防船撞系统,该类系统主要通过提取船舶静态、动态参数,进行碰撞风险预测,并给出船舶避碰操纵建议。该类主动防撞报警系统主要用于某一特定桥梁,且由于可见光、红外等作用距离较短,预警区域主要限于桥梁附近,但对于近距离的船舶,限于允许驾驶员操作反应的时间短,难以达到预期防撞成效。
6.经检索发现,公开号cn110031857a的中国专利于2019年7月19日公开了一种船舶超高预警系统,通过远距离激光对射传感器检测航道上航行的超高船只,该激光对射传感器只能检测到通航船舶是否超过预设高度,但不能检测得到通航船舶自身实际的高度。
7.公开号cn110299029a的中国专利于2019年10月1日公开了一种桥梁超高预警方法,在船舶靠近桥梁时通过探测阵列测得该船舶的高度信息,并将该高度信息与船舶的编号关联以形成该船舶的特征信息,进而可根据该特征信息进行超高判断。但是该专利存在以下缺陷:1)测得的船舶高度不是真实的船舶高度,而是最高位置的被触发的对射式激光
探测器的高度,未考虑船舶吃水及水位对测量结果的影响;2)最低对射式激光探测器至河道的最高水位距离达3m,当船舶吃水线低于或高于该最低对射式激光探测器时,都无法得到船舶水线以上真实高度;3)当船舶实际高度超过最高对射式激光探测器时,无法测得船舶最高点高度;4)测得的船舶高度不能用于下一限高水域的超高预警,一是因为船舶高度不是真实高度,二是因为不同水域的水位差别较大且船舶经过不同水域时的船舶吃水也会变化,可能会存在中途停靠港口装卸货的情况,因此,船舶经过下一限高水域时,水位、船舶吃水都可能变化,利用其测得的船舶高度可靠性不强;5)其探测阵列处于一直工作状态,耗能高且寿命短,不适用于长期应用;6)对近距离防撞不能起到有效的预警效果,主要是用于事后的防撞取证;7)由于不同区域桥梁通航净空高度、水位不同,仅适用于附近水域其他同级别桥梁预警。
8.结合实地调研与专家咨询,本发明设计一种快速测量船舶高度的装置及船舶超高预警方法,使得船舶在不同区域航行、装载状态(吃水)不同时,可依据船舶自身高度信息和吃水信息对船舶超高进行主动预警,该预警由监管部门发出,可有效降低船舶驾驶员判断失误概率。
技术实现要素:
9.为克服上述现有技术的不足,本发明提供一种快速测量船舶高度的装置、船舶超高预警系统及方法,以解决上述至少一个技术问题。
10.根据本发明说明书的一方面,提供一种快速测量船舶高度的装置,包括控制单元、ais基站单元、水位测量单元及相对设置在航道两侧的激光对射单元;所述ais基站单元,用于获取船舶信息并在船舶进入预设监测区时发送指令给激光对射单元和水位测量单元,同时发送船舶实时吃水给控制单元;所述激光对射单元,用于在接收到指令后启动激光对射并将因船舶遮挡激光对射通道产生的中断信号发送至控制单元;所述激光对射单元包括激光发射模块和激光接收模块;所述激光发射模块包括激光发射器,所述激光发射器通过光纤与光分束器相连,所述光分束器将激光均匀的分成多束发射激光并经由发射板发出,所述发射板上设有多个激光发射单元,多个所述激光发射单元沿竖直方向均匀布设;所述激光接收模块包括接收板,所述接收板上设有多个激光接收单元,多个所述激光接收单元沿竖直方向均匀布设且与多个激光发射单元相对应;所述水位测量单元,用于在接收到指令后发送测量区域的实时水位信息至控制单元;所述控制单元,分别与激光对射单元和水位测量单元相连,用于根据中断信号获取被遮挡激光对射通道的数量和高度值,得到船舶最高点高度与地平面的高度差,结合所述高度差与测量区域的实时水位信息、船舶实时吃水,计算得到船舶实际高度。
11.上述技术方案中,ais基站单元自动探测并获取船舶信息,当探测到船舶进入预设监测区内时,发送船舶高度测量指令给激光对射单元,同时发送水位测量指令给水位测量单元,发送船舶实时吃水信息给控制单元;激光对射单元启动激光对射,通过激光发射单元与激光接收单元之间形成的多个激光对射通道,采集船舶最高点高度信息,并发送给控制单元,用于得到船舶最高点高度与地平面的高度差;水位测量单元获取测量区域的实时水
位信息并发送给控制单元,用于与船舶最高点高度与地平面的高度差及船舶实时吃水结合起来,计算得到船舶的实际高度。
12.上述技术方案通过ais基站单元检测航行通过测量区域的船舶,确保每一艘经过测量区域的船舶都能够被测量得到船舶实际高度,以用于后续航行中的限高水域超高预警;同时,还通过ais基站单元设立预设监测区,只有在检测到船舶进入预设监测区时才启动激光对射单元进行船舶高度测量,一方面能够保证测量标的物是目标船舶,避免飞鸟、无人机等干扰,另一方面能够减少耗能,避免激光对射单元长时间处于工作状态造成的能耗大、使用寿命短的问题。
13.上述技术方案中,激光发射器发射的激光通过光纤传输至光分束器,由光分束器分成均匀的光束并通过多个发射孔配置的激光发射单元发射,然后通过激光对射通道送入对应的激光接收单元接收;当有船舶航行通过时,造成一个或多个激光对射通道中断,使对应的激光接收单元接收不到信号从而产生中断信号并发送给控制单元,控制单元根据发送中断信号的激光接收单元的数量及高度值得到船舶最高点高度与地平面的高度差。
14.进一步地,所述激光对射单元设有至少2组,至少2组激光对射单元沿航道方向间隔预定距离。当两艘船舶在会遇场景下行驶通过测量区域时,可结合至少2组激光对射单元反馈的信息和船舶ais信息确定每艘船舶的高度,解决船舶在会遇场景下通过激光对射通道所导致的重叠干扰问题,同时也可提高水位变化较大区域的船舶高度测量精度。当仅一艘船舶通过时,根据该至少2组激光对射单元分别反馈的信号,取平均值作为该艘船舶最高点高度与地平面的高度差。
15.作为进一步的技术方案,所述激光发射模块具有第一激光测量杆,所述第一激光测量杆朝向激光接收单元的一侧设置有发射板,所述发射板上设置多个激光发射位,每个激光发射位上配置一个发射孔,每个发射孔配置一个激光发射单元;所述激光接收模块具有第二激光测量杆,所述第二激光测量杆朝向激光发射单元的一侧设置有接收板,所述接收板上设置多个激光接收位,每个激光接收位上配置一个接收孔,每个接收孔配置一个激光接收单元;所述发射孔与接收孔一一对应并形成多个激光对射通道。
16.上述技术方案通过第一激光测量杆安装激光发射模块,通过第二激光测量杆安装激光接收模块,且第一激光测量杆、第二激光测量杆上均设有相对应的多组刻度值,用于表示激光对射通道所处的高度,这些刻度值可预存在控制单元中。该技术方案中的发射板和接收板可与测量杆一体成型或与测量杆可拆卸连接固定。
17.所述第一、第二激光测量杆标有至少2组刻度值,测量杆的具体测量高度区间视最大可能通航船舶的高度、需引起关注的最小通航船舶的高度以及所处位置的海拔高度确定。所述第一、第二激光测量杆相对设置在水流两侧的岸面上或附加已有建筑上。所述第一、第二激光测量杆可优选设置在航道相对较窄、海拔适宜且视野开阔的地方。如果有多对测量杆,则多对测量杆的间隔距离应考虑水文条件(如波长)、航道条件(如深度)等因素来设定。
18.作为进一步的技术方案,所述控制单元预存有每个激光对射通道对应的高度值以及相邻两个激光对射通道之间的间隔距离,当接收到多个被遮挡激光对射通道的信号时,对多个所述激光对射通道对应的高度值进行比较,以最大高度值与二分之一的间隔距离之和作为实际测量值。当船舶最高点位于相邻两个激光对射通道之间,遮挡了下方的激光对
射通道而未遮挡相邻上方的激光对射通道的情况,该取值方法可提高测量精度。
19.作为进一步的技术方案,所述预设监测区为自激光对射装置向两侧航道方向各延伸一定距离所形成的区域。例如,可选择激光对射装置两侧向上下游各延伸500~1000米的区域作为预设监测区。该技术方案适用于ais基站与激光对射装置设置在同一位置的情况,ais基站可以自动探测到远距离的船舶,但只有在这些船舶进入预设监测区时才触发激光对射装置进行船舶高度测量,提高工作效率,且延长激光对射装置使用寿命。
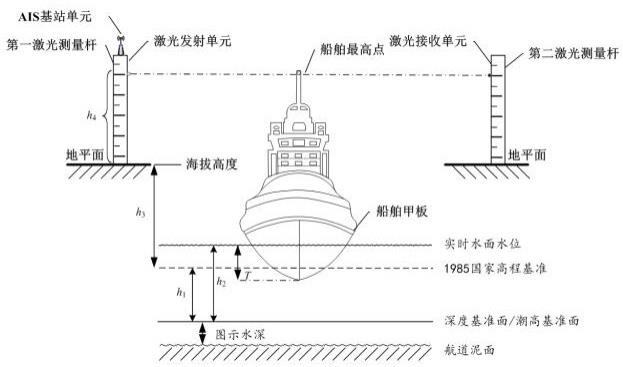
20.作为进一步的技术方案,当前船舶高度的计算公式为:式中:为船舶实际高度(m);为船舶实际吃水(m),通过船舶ais信息直接获取;为1985国家高程基准面与深度基准面/潮高基准面的高度差(m),由水文测量统计资料获取;为测量区域实时水位(m),由水位测量单元提供;为地平面与1985国家高程基准面的高度差(m);为船舶最高点高度与地平面的高度差(m)。
21.上述技术方案充分考虑了船舶测量高度、实时水位数据和船舶吃水而计算得到船舶的真实高度,该真实高度不受水位或船舶吃水状态的影响,在不同限高水域内,可结合该船舶真实高度与船舶实时吃水得到船舶实时的水面以上高度,并通过与其他限高水域桥区/架空线区的通航净空高度限制要求比较,进而判断船舶是否超高,进一步决定是否需要主动发出超高预警。
22.根据本发明说明书的一方面,提供一种船舶超高预警系统,包括船舶高度测量装置和船舶超高预警平台,所述船舶高度测量装置包括控制单元、ais基站单元、水位测量单元及相对设置在航道两侧的激光对射单元;所述激光对射单元用于获取船舶最高点的高度数据并发送给控制单元;所述水位测量单元用于获取测量区域的实时水位数据并发送给控制单元;所述ais基站单元用于获取船舶实时吃水并发送至控制单元;所述控制单元用于根据测量的船舶最高点高度数据、水位数据和船舶实时吃水计算得到船舶实际高度并上传至船舶超高预警平台;所述ais基站单元还用于获取船舶信息并上传至船舶超高预警平台,以及触发激光对射单元进行激光对射,触发水位测量单元发送实时水位数据;所述船舶超高预警平台用于将船舶高度数据融合到船舶ais信息中,形成附有船舶高度的ais信息库并进行存储,当船舶航行到达限高水域时,通过调用所述附有船舶高度的ais信息对船舶进行主动的超高预警判断,已确定船舶是否能够通过该限高水域的桥区/架空线区。
23.上述技术方案在ais基站单元的触发信号下启动测量装置进行船舶高度测量,结合水位数据及船舶实时吃水计算得到真实的船舶高度,同时基于ais基站单元获取船舶的ais信息,并将真实的船舶高度和ais信息在船舶超高预警平台上进行融合,形成附有船舶真实高度的ais信息,然后当船舶处于限高水域时,由船舶超高预警平台基于融合后的ais信息进行船舶超高预警判断,并在必要时向船舶发送主动预警。该技术方案可实现由海事监管部门主动进行船舶超高预警判断和发送,避免因船舶驾驶员进行超高风险判断时所存在的侥幸心理及主观性强的问题,进一步提高船舶超高预警的可靠性。
24.进一步来说,可在多个水域进行船舶高度测量,并分别上传给各水域对应的海事监管部门,各海事监管部门可共享并上传本水域测量的船舶高度数据,形成附有船舶高度
的ais信息库并存储在船舶超高预警平台,提高超高预警的高效性、准确性和全面性。当船舶在不同区域航行、装载状态(吃水)不同时,海事监管部门可调取存储的船舶高度数据,结合船舶吃水数据、监管区域内水位情况及通航净空高度限制要求,筛选存在超高风险的船舶并进行重点跟踪、监管和校核,对超过安全高度阈值的船舶显示报警信号,进而对船舶驾驶员、系统平台值班员进行安全提醒。
25.根据本发明说明书的一方面,提供一种船舶超高预警方法,包括:获取船舶信息并在船舶进入预设监测区时发送船舶高度测量指令;启动船舶高度测量程序,获取被遮挡的激光对射通道的数量和对应的高度值,得到船舶最高点高度与地平面的高度差;获取测量区域的实时水位信息,结合船舶最高点高度与地平面的高度差,计算得到船舶高度;获取船舶的ais信息,将计算得到的船舶高度添加至对应船舶的ais信息中,形成附有船舶高度的ais信息库并存储;对存在船舶活动的限高水域进行监控,在监控到船舶进入限高预警水域时,从附有船舶高度的ais信息中主动获取船舶高度及实时吃水,结合限高水域的实际水位和通航净空高度限制要求判断船舶是否能通过该限高水域的桥区/架空线区;若经判断船舶不能通过该限高水域的桥区/架空线区,则主动向船舶发出超高预警信息。
26.上述技术方案中,首先获取即将通过测量区域的船舶信息,当有船舶进入预设监测区时发送船舶高度测量指令给激光对射单元,对航经测量区域的船舶进行船舶高度测量,获取船舶高度并上传给船舶超高预警平台,同时获取船舶的ais信息并上传给船舶超高预警平台,在船舶超高预警平台上形成附加船舶高度的ais信息;在其他水域,船舶超高预警平台预测、追踪船舶航线,在监控到船舶到达限高水域时,主动获取附带船舶高度的ais信息,结合限高水域的实际水位和通航净空高度限制要求判断船舶是否能通过该限高水域的桥区/架空线区;并在船舶不能通过该限高水域的桥区/架空线区时,主动发出超高预警信息给对应船舶,实现由船舶超高预警平台主动进行船舶超高判断和预警,相较于现有技术依靠船舶自身进行超高判断并评估碰撞风险的方式而言,本发明方法更加高效、可靠、实用,避免船舶驾驶人员因个人判断失误或侥幸心理而导致不能通过限高水域桥区/架空线区而引发险情事故。
27.作为进一步的技术方案,所述方法进一步包括:船舶超高预警平台根据船舶的航向、航速、位置及航行计划判断船舶到达限高水域时,调用该船舶附有船舶高度的ais信息,获取该船舶的高度和实时吃水数据,判断船舶水线以上高度是否小于设定的安全高度阈值,并决定是否需要对船舶发出超高预警。
28.作为进一步的技术方案,所述方法进一步包括:当船舶接收到超高预警时,进一步校核实际吃水及水线以上高度信息,并通过调整船舶压载状态、收放桅杆或抛锚候潮的方式来降低通过限高水域桥区/架空线区的超高风险。
29.作为进一步的技术方案,所述船舶超高预警平台根据船舶航行计划获取船舶将要航经的多个限高水域,根据各限高水域的限高阈值在船舶ais信息库中快速筛选出超高船舶,在所述超高船舶到达相应限高水域前,主动进行超高预警并提醒船舶驾驶员复核船舶
吃水及水线以上高度。
30.与现有技术相比,本发明的有益效果在于:(1)本发明提供一种装置,通过ais基站单元获取船舶信息并在船舶进入预设监测区时发送船舶高度测量指令给激光对射装置,激光对射测量通航船舶的最高点与地平面的高度差,然后结合测量区域的水位信息、船舶实时吃水计算得到船舶高度;该装置采用光纤传导激光,采用光分束器将激光均匀分为多束激光,并通过发射板上的多个激光发射单元发射出去,形成一个竖直方向的激光发射面,确保发射激光能够覆盖到航经船舶的最高点,同时在激光接收端采用相对应的接收板接收,获取被遮挡的激光接收单元的数量及对应高度数据,然后通过控制单元计算得到船舶实际高度,实现对船舶高度的自动测量。
31.(2)本发明提供一种系统,该系统基于快速测量船舶高度的装置获取船舶高度,基于ais基站单元获取船舶的ais信息,并将获取的船舶高度和ais信息在船舶超高预警平台上进行融合,然后由船舶超高预警平台基于融合后的ais信息进行船舶超高预警判断;该系统可基于海事监管部门协同构建船舶超高预警平台,进而统筹实现对多个限高水域的船舶超高进行预警。
32.(3)本发明提供一种方法,首先获取即将通过测量区域的船舶信息,当有船舶进入预设监测区时发送船舶高度测量指令给激光对射单元,对航经测量区域的船舶进行船舶高度测量,获取船舶最高点高度数据并上传给船舶超高预警平台,同时获取船舶的ais信息和现场的水位数据并上传给船舶超高预警平台,在船舶超高预警平台上形成附加船舶高度的ais信息;在其他水域,船舶超高预警平台预测、追踪船舶航线,在监控到船舶到达限高水域时,主动获取附带船舶高度的ais信息,判断船舶是否能通过该限高水域的桥区/架空线区;并在船舶不能通过该限高水域的桥区/架空线区时,主动发出超高预警信息给对应船舶,实现由船舶超高预警平台主动进行船舶超高判断和预警,相较于现有技术依靠船舶自身进行超高判断并评估碰撞风险的方式而言,本发明方法更加高效、可靠、实用,避免船舶驾驶人员因个人判断失误或侥幸心理而导致不能通过限高水域桥区/架空线区而引发险情事故。
33.(4)本发明方法可根据船舶高度及不同限高水域的限高阈值筛选出超高船舶,对超高船舶进行重点监管,在超高船舶到达限高水域之前,主动提醒船舶驾驶员对船舶吃水及水线以上高度进行复核,并在必要时依据船舶超高预警平台的判断发出超高预警,使超高船舶能够及早掌握超高风险点,通过调整船舶压载状态、收放桅杆、抛锚侯潮等有效方式,保障安全通过桥区/架空线区。
附图说明
34.图1为根据本发明实施例的一种快速测量船舶高度的装置的示意图。
35.图2为根据本发明实施例的船舶高度测量计算示意图。
36.图3为根据本发明实施例的船舶超高预警系统的结构图。
37.图4为根据本发明实施例的船舶超高预警方法的流程图。
具体实施方式
38.以下将结合附图对本发明各实施例的技术方案进行清楚、完整的描述,显然,所描述发实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本
领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施例,都属于本发明所保护的范围。
39.实施例1本实施例提供一种快速测量船舶高度的装置,如图1所示,包括控制单元、ais基站单元、水位测量单元及相对设置在航道两侧的激光对射单元。
40.所述激光对射单元包括激光发射模块和激光接收模块。所述激光对射单元,用于在接收到指令后启动激光对射并将因船舶遮挡激光对射通道产生的中断信号发送至控制单元。
41.所述激光发射模块具有第一激光测量杆,所述第一激光测量杆朝向激光接收单元的一侧设置有发射板,所述发射板上设置多个激光发射位,每个激光发射位上配置一个发射孔,每个发射孔配置一个激光发射单元。所述激光发射模块包括激光发射器,所述激光发射器通过光纤与光分束器相连,所述光分束器将激光均匀的分成多束发射激光并经由发射板发出,所述发射板上设有多个激光发射单元,多个所述激光发射单元沿竖直方向均匀布设。
42.所述激光接收模块具有第二激光测量杆,所述第二激光测量杆朝向激光发射单元的一侧设置有接收板,所述接收板上设置多个激光接收位,每个激光接收位上配置一个接收孔,每个接收孔配置一个激光接收单元。所述激光接收模块包括接收板,所述接收板上设有多个激光接收单元,多个所述激光接收单元沿竖直方向均匀布设且与多个激光发射单元相对应。
43.所述发射孔与接收孔一一对应并形成多个激光对射通道。相邻激光对射通道的间隔为0.1~1m。
44.所述第一、第二激光测量杆标有刻度值,具体测量高度区间视最大可能通航船舶的高度、需引起关注的最小通航船舶的高度以及所处位置的海拔高度确定。
45.激光测量杆相对设置在水流两侧的岸面上或附加已有建筑上,多对激光测量立杆的间隔距离应具有一定的代表性,如需考虑水文条件(如波长)、航道条件(如深度)等。
46.具体的激光对射通道的数量可按照精度要求合理,间隔为0.1~1m等。
47.所述ais基站单元,用于获取船舶信息并在船舶进入预设监测区时发送指令给激光对射单元和水位测量单元,同时发送船舶实时吃水给控制单元。获取的船舶信息包括船舶名称、mmsi、实时吃水等。
48.所述预设监测区为激光对射装置向两侧航道方向各延伸500~1000米所形成的区域。
49.所述ais基站单元设置在某个测量杆顶端或附近合适建筑物上方。
50.所述水位测量单元,用于在接收到指令后发送测量区域的实时水位信息至控制单元;所述水位测量装置设置在激光测量杆附近或引用临近水位观测站数据。
51.所述控制单元,分别与激光对射单元和水位测量单元相连,用于根据中断信号获取被遮挡激光对射通道的数量和高度值,得到船舶最高点高度与地平面的高度差,结合所述高度差与测量区域的实时水位信息和船舶实时吃水,计算得到船舶实际高度。
52.所述控制单元预存有每个激光对射通道对应的高度值以及相邻两个激光对射通道之间的间隔距离,当接收到多个被遮挡激光对射通道的信号时,对多个所述激光对射通
道对应的高度值进行比较,以最大高度值与二分之一的间隔距离之和作为实际测量值。
53.如图2所示,当前船舶高度的计算公式为:式中:为船舶实际高度(m);为船舶实际吃水(m),通过船舶ais信息直接获取;为1985国家高程基准面与深度基准面/潮高基准面的高度差(m),由水文测量统计资料获取;为测量区域实时水位(m),由水位测量单元提供;为地平面与1985国家高程基准面的高度差(m);为船舶最高点高度与地平面的高度差(m)。
54.进一步地,当已获得实际高度值的船舶再次经过测量区域时,通过本实施例可再获取一次船舶高度值,并对最新获取的船舶高度值和历史获取的船舶高度值进行处理,以两者的平均值作为该船舶的实际高度值并在船舶的ais信息中更新。
55.作为一种实施方式,所述激光对射单元可设至少2组,该至少2组激光对射单元沿航道方向间隔预定距离。当两艘船舶在会遇场景下行驶通过测量区域时,可结合2组激光对射单元反馈的信息和船舶ais信息确定每艘船舶的高度。当仅一艘船舶通过时,根据该至少2组激光对射单元分别反馈的信号,取平均值作为该艘船舶最高点高度与地平面的高度差。
56.本实施例充分考虑到船舶测量高度和实时水位数据计算得到船舶的真实高度,该真实高度不受水位或船舶吃水状态的影响,在不同限高水域内,可结合该船舶真实高度与船舶实时吃水得到船舶实时的水面以上高度,并通过与其他限高水域桥区/架空线区的限高值比较,进而判断船舶是否超高,进一步决定是否需要主动发出超高预警。
57.实施例2本实施例提供一种船舶超高预警系统,如图3所示,包括船舶高度测量装置和船舶超高预警平台,所述船舶高度测量装置包括控制单元、ais基站单元、水位测量单元及相对设置在航道两侧的激光对射单元。
58.所述船舶高度测量装置包括控制单元、ais基站单元、水位测量单元及相对设置在航道两侧的激光对射单元。
59.所述激光对射单元用于获取船舶最高点的高度数据并发送给控制单元。
60.所述ais基站单元用于获取船舶实时吃水并发送至控制单元,以及获取船舶信息并上传至船舶超高预警平台,以及触发激光对射单元和水位测量单元工作。
61.所述水位测量单元用于获取测量区域的实时水位数据并发送给控制单元。
62.所述控制单元用于根据测量的船舶最高点高度数据、实时水位数据及船舶实时吃水计算得到船舶实际高度并上传至船舶超高预警平台。
63.所述船舶超高预警平台用于将船舶高度数据融合到船舶ais信息中,形成附有船舶高度的ais信息并进行存储,当船舶航行到达限高水域时,通过调用所述附有船舶高度的ais信息对船舶进行主动的超高预警判断。
64.本实施例在ais基站单元的触发下启动测量装置进行船舶高度测量,启动水位测量单元发送实时水位数据,然后结合ais基站单元发送的船舶实时吃水计算得到真实的船舶高度;将ais基站单元获取的船舶ais信息发送至船舶超高预警平台,并将真实的船舶高度和ais信息在船舶超高预警平台上进行融合,形成附有船舶真实高度的ais信息,然后当
船舶处于限高水域时,由船舶超高预警平台基于融合后的ais信息进行船舶超高预警判断,并在必要时向船舶发送主动预警。
65.本实施例可实现由海事监管部门主动进行船舶超高预警判断和发送,避免因船舶驾驶员进行超高风险判断所存在的侥幸心理及主观性强的问题,进一步提高预警可靠性。
66.本实施例可在多个水域进行船舶高度测量,并分别上传给各水域对应的海事监管部门,各海事监管部门可共享并上传本水域测量的船舶高度数据,形成附有船舶高度的ais信息库并存储在船舶超高预警平台,提高超高预警的高效性、准确性和全面性。
67.当船舶在不同区域航行、装载状态(吃水)不同时,海事监管部门可调取存储的船舶高度数据,结合船舶吃水数据、监管区域内水位情况及通航净空高度限制要求,筛选存在超高风险的船舶并进行重点跟踪、监管和校核,对超过安全高度阈值的船舶显示报警信号,进而对船舶驾驶员、系统平台值班员进行安全提醒。
68.实施例3本实施例提供一种船舶超高预警方法,如图4所示,基于实施例2的船舶超高预警系统实现。所述方法包括:步骤一,发送船舶高度测量指令:通过ais基站单元获取船舶信息并在船舶进入预设监测区时发送船舶高度测量指令。
69.步骤二,启动船舶高度测量程序:通过激光对射单元获取被遮挡的激光对射通道的数量和高度值,得到船舶最高点高度与地平面的高度差。
70.步骤三,计算得到船舶真实高度:通过水位测量单元获取测量区域的水位信息,通过ais基站单元获取船舶实时吃水,然后结合船舶最高点高度与地平面的高度差,计算得到船舶的真实高度。
71.步骤四,形成附有船舶高度的ais信息:通过ais基站单元获取船舶的ais信息,将计算得到的船舶高度添加至对应船舶的ais信息中,形成附有船舶高度的ais信息库并存储。
72.步骤五,判断船舶是否能通过桥区/架空线区:对存在船舶活动的限高水域进行监控,在监控到船舶进入限高预警水域时(可视情设置,需预留船舶应急操纵时间),从船舶ais信息主动获取船舶高度及实时吃水,结合限高水域的实际水位和通航净空高度限制要求等信息判断船舶是否能通过该限高水域桥区/架空线区。
73.步骤六,主动发出超高预警信息:当监测到船舶不能通过该限高水域桥区/架空线区时,主动发出超高预警信息给对应船舶。
74.进一步而言,船舶超高预警平台根据船舶的航向、航速、位置及航行计划判断船舶到达限高水域时,调用该船舶附有船舶高度的ais信息,获取该船舶的高度和实时吃水数据,并判断是否需要对船舶发出超高预警。
75.所述方法进一步包括:当船舶接收到超高预警时,进一步校核实际吃水及水线以上高度信息,并通过调整船舶压载状态、收放桅杆或抛锚候潮等方式来降低通过限高水域桥区/架空线区的超高风险。
76.所述船舶超高预警平台根据船舶航行计划获取船舶将要航经的多个限高水域,根据各限高水域的限高阈值在船舶ais信息库中快速筛选出超高船舶,在所述超高船舶到达相应限高水域时,主动进行超高预警并提醒船舶驾驶员复核船舶吃水及水线以上高度。
77.本实施例通过对采集船舶高度信息并融合ais信息进行存储后,当船舶在不同区域航行、装载状态(吃水)不同时,海事监管部门可结合船舶吃水数据、监管区域内水位情况及通航净空高度限制要求,筛选存在超高风险的船舶并进行重点跟踪、监管和校核,对超过安全高度阈值的船舶显示报警信号,进而对船舶驾驶员、系统平台值班员进行安全提醒,及时消除安全隐患,降低船舶触碰桥梁/架空线的概率。
78.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1