一种基于毫米波雷达的全屋人员追踪方法与流程
1.本发明涉及毫米波雷达应用领域,具体涉及一种基于毫米波雷达的全屋人员追踪方法。
背景技术:
2.安防科技与智能化相结合是一个全屋智能系统的大发展方向。目前,现有技术中常用的全屋监控系统使用视频监控或者红外传感监控,视频监控涉及到人员隐私容易引起被监测方抵触,而红外人体感应只能用于判定人员的有无状态,难以获取人员的精确位置信息。
技术实现要素:
3.本发明所要解决的技术问题是:提出一种基于毫米波雷达的全屋人员追踪方法,在保证室内人员精确追踪检测的同时,保护隐私。
4.本发明解决上述技术问题采用的技术方案是:
5.一种基于毫米波雷达的全屋人员追踪方法,包括以下步骤:
6.s1、在全屋相应区域部署毫米波雷达;
7.s2、建立全屋模型;
8.s3、在应用时,定时采样部署的各个雷达上报的目标人员数据并转换为全屋坐标数据,将全屋坐标数据记录在全屋模型中;
9.s4、在全屋模型中对各雷达上报的目标人员数据创建全屋全局标识,用于全屋追踪;
10.s5、在全屋追踪过程中,根据各个检测分区的门线区域内的目标人员丢失/新增情况,判断是否发生跨域事件,若发生跨域事件,则将该跨域的目标人员信息继承到新的区域中的相应新增点位上。
11.作为进一步优化,步骤s1中,所述在全屋相应区域部署毫米波雷达的方法包括:
12.获取房屋户型平面图,在房屋户型平面图的基础上标定毫米波雷达安装点位,确保房屋全部区域都能够被雷达照射。
13.作为进一步优化,步骤s2中,所述建立全屋模型的方法包括:
14.以房屋户型平面图作为模型基础,按照雷达所在房屋区域对全屋检测区域进行物理或者逻辑分区获得检测分区,并以相邻两个检测分区的通道交汇处一定范围内的区域作为相应检测分区的门线区域;
15.根据各雷达的成像区域和其安装位置确定雷达成像的边界;在对雷达监测区域中的目标人体的识别判断时仅针对边界内的数据进行分析;
16.将部署的各个雷达的位置坐标以及雷达探测的目标位置转换为以房屋户型结构外接矩形为整体图像的世界坐标系中的坐标。
17.作为进一步优化,将雷达探测的目标位置转换为以房屋户型结构外接矩形为整体
图像的世界坐标系中的坐标的方法包括:
18.将以房屋户型结构外接矩形为整体图像的左上角作为坐标原点,坐标原点向右为x轴增量方向,坐标原点向下为y轴增量方向;则有:
19.雷达探测的目标位置的世界坐标x轴分量=雷达安装位置世界坐标x轴分量+雷达坐标系探测点位x轴分量*cos(alpha角度)+雷达坐标系探测点位y轴分量*sin(alpha角度);
20.雷达探测的目标位置的世界坐标y轴分量=雷达安装位置世界坐标y轴分量+雷达坐标系探测点位x轴分量*sin(alpha角度)
‑
雷达坐标系探测点位y轴分量*cos(alpha角度);
21.其中,alpha角度是雷达法线方向沿逆时针旋转到世界坐标系y轴负半轴的角度。
22.作为进一步优化,步骤s5中,所述根据各个检测分区的门线区域内的目标人员丢失/新增情况,判断是否发生跨域事件,具体包括:
23.通过对雷达影像的前、后帧做差,判断在检测分区是否发生了目标人员丢失或者有新增的目标人员,若有目标人员丢失或者有新增的目标人员,且丢失的位置或新增的目标人员的位置位于门线区域内,则判定为发生跨域事件。
24.作为进一步优化,步骤s5中,所述若发生跨域事件,则将该跨域的目标人员信息继承到新的区域中的相应新增点位上,具体包括:
25.判断发生跨域事件的区域的相邻区域中是否出现新增的目标人员或者丢失的目标人员,若有,且当前位置与本区域发生跨域事件时丢失的目标人员或者新增的目标人员的点位的距离小于设定阈值,则将丢失的目标人员的信息继承到相邻区域中相应新增的目标人员点位上。
26.作为进一步优化,步骤s5还包括:
27.若在检测分区的非门线区域发生目标人员丢失,则将丢失的目标人员的点位标记为静态点,后续如果在该检测分区发现非门线区域的新增目标人员,且所述新增目标人员的点位与静态点的距离小于设定阈值,则将所述静态点的目标人员信息继承到所述新增目标人员的点位上。
28.本发明的有益效果是:
29.利用毫米波雷达对动态物体追踪,建模形成一个依据房屋结构和覆盖房屋结构中的雷达对人体成像的点位数据构建的全屋追踪模型,该模型对全屋检测区域进行物理或者逻辑分区获得检测分区,并通过相邻检测分区的门线区域内的检测目标丢失/新增来判断目标跨域;因此,该模型可以用来跨雷达区域(跨房间或者房屋功能区)对人体进行跟踪,实现全屋或分区域人员数目统计,人员定位,人员身份持续保持。
30.由于毫米波雷达能够实现精确定位,且成像点数相对于视频检测的图像的像素要少很多,因此,本发明能够在保证检测精度的同时提供隐私的保护,极大的增加了人员动态追踪进入家庭或者隐私敏感领域的可能性,非常适用于居家环境或者有需要人员动态追踪的公共场所。
附图说明
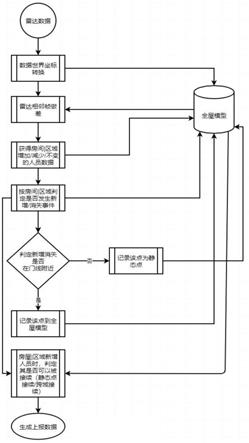
31.图1是实施例在应用全屋模型进行人员追踪过程的雷达数据交互流程。
具体实施方式
32.本发明旨在提出一种基于毫米波雷达的全屋人员追踪方法,在保证室内人员精确追踪检测的同时,保护隐私。由于毫米波雷达的特性,获取的雷达波反射回来的点云信号中包含的人体特征信号非常少,仅有极少量的人体位置特征,因此,不会侵犯到隐私。基于此,本发明采用毫米波雷达进行人体目标探测,并建模形成一个依据房屋结构和覆盖房屋结构中的雷达对人体成像的点位数据构建的全屋追踪模型,按照区域划分,拼接各个雷达照射的有效范围,通过算法将各个区域不停穿插的人员分别进行全局唯一性标记,实现人员在屋内活动的全追踪。
33.在具体实现上,首先,在全屋相应区域部署毫米波雷达:获取房屋户型平面图,在房屋户型平面图的基础上标定毫米波雷达安装点位,确保房屋全部区域都能够被雷达照射。由于我们采用的毫米波雷达成像角度达到了120
°
,成像距离达到8米,在将其安装在房间的一角时,可以完全覆盖一个矩形区域的房间;而由于雷达具有穿透性,边界以外仍然可以成像,因此,我们需要对雷达的有效检测区域进行约束,将其约束到房间几何形态,在对雷达监测区域中的目标人体的识别判断时仅针对边界内的数据进行分析,以避免雷达信号穿墙带来的检测干扰。
34.全屋模型的建立是以房屋户型平面图作为模型基础,由于单个雷达只能覆盖一个矩形区域,我们将房屋划分成多个区域,按照雷达所在房屋区域对全屋检测区域进行物理或者逻辑分区获得检测分区,其中物理分区可以以房间的门为界限,而逻辑分区是以功能划分,设置虚拟的界限,比如:对于客厅和餐厅共用一个雷达的情况,可以在客厅和餐厅之间设置一道虚拟的门作为分区的界限。而为了提高对跨分区人员检测跟踪的准确性,我们以相邻两个检测分区的通道交汇处一定范围(如:20cm)作为相应检测分区的门线区域;如果在某个检测分区的门线区域内出现目标丢失,并且在相邻检测分区的门线区域内出现新增目标,两者之间的位置比较接近,则可以判定为目标跨域,进而通过将该丢失的目标的信息继承到相邻区域新的点位上,来实现全屋的人员追踪。
35.在通过全屋模型进行全屋人员追踪时,还存在雷达成像坐标与全屋世界坐标的转换问题。具体转换方式为:是以房屋户型结构外接矩形为整体图像的左上角为坐标原点,坐标原点向右为x轴增量方向,坐标原点向下为y轴增量方向;则有:
36.雷达探测的目标位置的世界坐标x轴分量=雷达安装位置世界坐标x轴分量+雷达坐标系探测点位x轴分量*cos(alpha角度)+雷达坐标系探测点位y轴分量*sin(alpha角度);
37.雷达探测的目标位置的世界坐标y轴分量=雷达安装位置世界坐标y轴分量+雷达坐标系探测点位x轴分量*sin(alpha角度)
‑
雷达坐标系探测点位y轴分量*cos(alpha角度);
38.其中,alpha角度是雷达法线方向沿逆时针旋转到世界坐标系y轴负半轴的角度。
39.实施例:
40.本实施例在应用全屋模型进行人员追踪过程的雷达数据交互流程如图1所示,其包括:
41.1、定时采样雷达上报的数据,根据雷达的房屋和区域标号,按照雷达的安装位置和角度信息转换采样数据为全屋坐标数据,将数据记录在全屋模型中;
42.2、对雷达上报的目标数据创建一个全屋全局标识,此标识用于全屋跟踪;
43.3、在全屋追踪过程中,根据各个检测分区的门线区域内的目标人员丢失/新增情况,判断是否发生跨域事件,若发生跨域事件,则将该跨域的目标人员信息继承到新的区域中的相应新增点位上。
44.当目标人员在实体分区/虚拟分区中跨区域移动时,由于人员移动会触发两种事件:
①
离开区域事件(人员在区域边缘消失)
②
进入区域事件(人员在区域边缘出现)。这两种事件会成对发生,统称为“跨域事件”,且跨域事件发生的区域一定是在相邻的分区交界(实体门或者虚拟门)附近,那么,将门线区域作为观察区,就能够将成对出现的离开和进入事件在空间上进行比对,当发生跨区域事件后,我们将当前区域丢失的目标人员的信息通过配对携带到相邻区域对应新增的点位上,这样就实现了全屋的人员追踪。
45.具体配对操作为:通过比较当前区域在门线区域中丢失的目标人员最后的坐标位置与相邻区域在门线区域出现新增人员的坐标位置之间的距离,如果距离小于阈值,表明两个点位非常接近,从而可以判定为相邻区域新增的目标即为在当前区域丢失的目标,从而进行人员信息的接续。
46.此外,由于毫米波雷达对人体的判定是依照物体运行轨迹进行识别,所以存在当人体完全静止不动(比如躺下,坐下,静止站立)一段时间会发生静态丢失的问题。在本实施例中,当人体在屋内非门线附近丢失(静态丢失),那么我们将会记录这个丢失位置标记为静态点,如果目标重新运动被雷达发现,我们在静态点中去判定新的动态人体点位和静态丢失点位在位置上是否几何接近,如果几何接近那么我们就可以判定该动态点就是对应静态点的接续,从而让该动态点继承静态点的人员标识,实现跟踪的接续。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1