1.本发明涉及车辆导航领域,具体而言,涉及一种车辆导航方法以及计算机可读存储介质。
背景技术:2.随着车载导航系统的普及,越来越多的车辆配备了车载导航系统,当前车载导航遇到高架路等复杂路况时,往往无法及时识别出车辆驶入高架路还是保持原路行驶,无法为用户提供准确的车辆定位以及重新规划导航路线,影响用户体验。
3.所以,很有必要针对包括上述这些情况在内的现有问题或弊端进行充分研究,以便加以改进。
技术实现要素:4.本发明提出一种车辆导航方法,其能够根据路况重新规划车辆导航路线。
5.根据本发明一个方面提出的车辆导航方法,所述车辆导航方法包括以下步骤:a)获取道路坡度信息,b)计算车辆的高度变化,c)将车辆的高度变化与道路坡度信息相比较,判断车辆的高度变化与道路坡度信息是否匹配,d)如果车辆的高度变化与道路坡度信息不匹配,则重新规划车辆导航路线。
6.根据本发明一个方面提出的车辆导航方法,道路坡度信息预先存储在车辆导航系统中,并且/或者道路坡度信息能够通过与远程的存储设备通讯而更新。
7.根据本发明一个方面提出的车辆导航方法,在车辆上设有三轴加速计以及车速传感器,用于计算车辆的高度变化。
8.根据本发明一个方面提出的车辆导航方法,根据所述三轴加速计以及所述车速传感器来计算车辆的俯仰角,并且通过所得的俯仰角来计算车辆的高度变化。
9.根据本发明一个方面提出的车辆导航方法,根据所述三轴加速计以及所述车速传感器来计算车辆在各个时刻的俯仰角,并且通过所得的车辆在各个时刻的俯仰角来计算车辆在各个时刻的高度变化,接着通过对车辆在各个时刻的高度变化进行积分得到车辆在一个时间段内的高度变化。
10.根据本发明一个方面提出的车辆导航方法,通过所述三轴加速计来测量车辆在前进方向的加速度(x
t
),通过所述车速传感器来测量车辆沿着路面的速度(v)。
11.根据本发明一个方面提出的车辆导航方法,车辆的俯仰角(θ)根据以下公式得出:,其中g为重力加速度。
12.根据本发明一个方面提出的车辆导航方法,在步骤c)中,如果车辆的高度变化与道路坡度信息之差超过了一定的阈值,则车辆的高度变化与道路坡度信息不匹配。
13.根据本发明一个方面提出的车辆导航方法,在步骤d)中,根据车辆的高度变化与道路坡度信息的差值来判断车辆是进入高架还是隧道,再重新规划车辆导航路线。
14.根据本发明一个方面提出的计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现根据本发明的方法的步骤。
15.本发明的有益效果包括:在根据本发明的车辆导航方法中,在获取道路坡度信息的基础上计算车辆的高度变化,并且将车辆的高度变化与道路坡度信息相比较,如果车辆的高度变化与道路坡度信息不匹配则重新规划车辆导航路线。通过这样的方式,该车辆导航方法能够根据车辆实际行驶的路况进行调整并且重新规划车辆导航路线。
附图说明
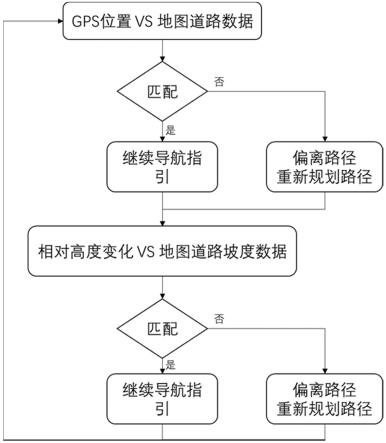
16.参照附图来说明本发明的公开内容。应当了解,附图仅仅用于说明目的,而并非意在对本发明的保护范围构成限制。在附图中,除非另有说明,相同的附图标记用于指代相同的部件。其中:图1示意性显示了根据本发明一个实施方式提出的车辆导航方法的工作原理。
具体实施方式
17.容易理解,根据本发明的技术方案,在不变更本发明实质精神下,本领域的一般技术人员可以提出可相互替换的多种结构方式以及实现方式。因此,以下具体实施方式以及附图仅是对本发明的技术方案的示例性说明,而不应当视为本发明的全部或者视为对本发明技术方案的限定或限制。
18.下面对本文中所建立的坐标系进行说明。坐标系的原点o与车辆的质心重合,xoz处于汽车左右对称的平面中。当车辆在水平路面上处于静止状态时,x轴平行于地面指向前方,y轴指向驾驶员左侧,z轴通过质心指向上方。
19.根据本发明的一实施方式结合图1示出。车辆导航方法包括以下步骤:a)获取道路坡度信息,b)计算车辆的高度变化,c)将车辆的高度变化与道路坡度信息(例如道路坡度变化)相比较,判断车辆的高度变化与道路坡度信息是否匹配,d)如果车辆的高度变化与道路坡度信息不匹配,则重新规划车辆导航路线。
20.在根据本发明的车辆导航方法中,在获取道路坡度信息的基础上计算车辆的高度变化,并且将车辆的高度变化与道路坡度信息相比较,如果车辆的高度变化与道路坡度信息不匹配则重新规划车辆导航路线。通过这样的方式,该车辆导航方法能够根据车辆实际行驶的路况进行调整并且重新规划车辆导航路线。
21.例如,道路坡度信息预先存储在用于执行车辆导航方法的车辆导航系统(例如娱乐系统)中,并且/或者道路坡度信息能够通过与远程的存储设备通讯而更新。
22.示例性地,在车辆上设有三轴加速计以及车速传感器,用于计算车辆的高度变化。具体地,根据所述三轴加速计以及所述车速传感器来计算车辆的俯仰角,并且通过所得的俯仰角来计算车辆的高度变化。更具体地,将一个时间段划分为多个时刻,各个时刻之间形成一个微时段,根据所述三轴加速计以及所述车速传感器来计算车辆在各个时刻的俯仰角,并且通过所得的车辆在各个时刻的俯仰角来计算车辆在各个时刻(即各个微时段内)的高度变化,接着通过对车辆在各个时刻的高度变化进行积分得到车辆在一个时间段内的高
度变化,再将该一个时间段内的高度变化与道路坡度信息相比较,判断车辆的高度变化与道路坡度信息是否匹配。
23.示例性地,通过所述三轴加速计来测量车辆在前进方向的加速度x
t
,通过所述车速传感器来测量车辆沿着路面的速度v。由此,车辆的俯仰角θ根据以下公式得出:,其中g为重力加速度。
24.对应地,车辆的高度变化h根据以下公式得出:h =dist*sinθ,其中dist为车辆的行驶路程。
25.根据本发明的一实施方式,在步骤c)中,如果车辆的高度变化与道路坡度信息之差超过了一定的阈值(例如2m,3m,4m,5m或6m),则判断车辆的高度变化与道路坡度信息不匹配。车辆的高度变化与道路坡度信息不匹配的可能原因是车辆不在当前的导航路线的道路上行驶,例如车辆进入了高架或者隧道。
26.根据本发明的一实施方式,在步骤d)中,根据车辆的高度变化与道路坡度信息的差值来判断车辆是进入高架还是隧道,再重新规划车辆导航路线。
27.通常在车辆上,tbox模块提供gps位置,娱乐系统模块进行数据融合和执行导航功能。tbox模块和娱乐系统模块为分离的模块,通过can总线或以太网进行通讯。娱乐系统模块通过融合tbox模块发来的gps信息和三轴加速计计算得到的相对高度信息,实现水平路况和高架路况的立体导航。
28.在用户开启路线导航时,在道路没有岔路口情况下,车辆按照导航引导行驶。在遇到水平岔路口时,通过tbox发来的gps位置识别车辆是否按照导航指引行驶,如果车辆偏离导航指引,则重新规划路线。在遇到包含高架路的岔路口时,计算车辆相对高度变化,与地图中道路坡度进行对比,从而识别车辆是否跟随导航指引。在用户未开启路线导航,即车辆巡航时,默认车辆跟随主路行驶。
29.在开启导航路线指引情况下,实时对比gps位置与地图道路数据中的位置,在未开始路线导航时,默认使用主路位置。如果gps位置与地图道路数据匹配,则继续进行导航;如果两者不匹配,则说明驾驶员偏离路线指引,重新规划路线。在水平位置匹配的情况下,计算车辆的相对高度变化,实时检测相对高度变化与地图数据中道路坡度变化是否匹配。如果车辆的相对高度变化与地图数据中道路坡度变化匹配,则继续进行导航指引;如果不匹配,说明车辆未按照规划道路行驶,车辆偏离路线,需重新规划路线。
30.本发明还包括一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现前述的任意一项或多项实施方式所述的方法的步骤,其因此带有的技术特征以及具有的技术效果相应于前面的描述,故在此不再赘述。
31.本发明的技术范围不仅仅局限于上述说明中的内容,本领域技术人员可以在不脱离本发明技术思想的前提下,对上述实施例进行多种变形和修改,而这些变形和修改均应当属于本发明的保护范围内。