轴类产品的视觉检测装置的制作方法
1.本公开涉及机器视觉技术领域,具体涉及一种轴类产品的视觉检测装置。
背景技术:
2.基于机器视觉对轴类产品进行无损检测,常用于检测区域的送料方式主要分为三大类:机械手装置、传送带装置以及转盘装置。
3.机械手装置的优点在于灵活性高、通用性好,其缺点也很明显,一是由于机械手基座位置固定,其作用范围非常有限,二是效率低,不太适用于对速度要求很高的检测领域,三是成本高。
4.传送带送料装置的优点在于结构简单、成本低廉、其检测速度可以是机械手装置的3~10倍,传统意义上的传送带送料装置的劣势和缺点有以下方面,一是基本采用透明传送带类型,通过在透明传送带下方放置背光源来对产品进行尺寸检测,很少使用传送带来对产品执行外观检测,二是基本选取较窄的传送带来输送产品,且采取横向长距离输送的形式运输产品,过窄及过长的传送带在长时间运动后极易造成松动,且上下震荡明显,影响检测精度,三是由于轴类产品易滚动,具有不稳定性。
5.转盘装置即以转动盘形式驱动产品旋转检测的装置,其优点在于通过伺服电机定位,能达到较高的机械定位精度,速度相比于传送带送料更快。其缺点也同样明显,一是转盘槽位及其深度影响检测精度,二是产品在转盘上高速运动影响检测精度,无法满足一般精度检测需求,三是结构通用性差,无法满足多尺度检测需求。
6.针对轴类产品,要想实现对于产品的全表面外观检测,首先需要满足产品在检测区域上转动这一条件。而目前传统的送料检测装置(上文所述的机械手装置、传送带装置以及转盘装置)均无法满足使产品旋转检测这一特定条件,因此基于上述装置制作出来的设备只能完成对于产品的简单尺寸检测,而无法对轴类产品全表面外观的检测。
技术实现要素:
7.为了解决相关技术中的问题,本公开实施例提供一种轴类产品的视觉检测装置。
8.本公开实施例中提供了一种轴类产品的视觉检测装置。
9.具体地,所述轴类产品的视觉检测装置包括:
10.具有导向通道的导向组件;
11.驱动组件,包括传送带;所述传送带位于所述导向通道下方;
12.图像采集组件,包括固定于所述导向组件上方的相机;
13.其中,所述导向通道包括与所述传送带的输送方向不同的倾斜通道部分,待测轴类产品在所述传送带的驱动下,在所述倾斜通道部分转动,并由所述相机采集图像。
14.可选地,所述导向通道的中部为倾斜通道部分,两个端部中至少一个端部为与所述输送方向相同的水平通道部分。
15.可选地,所述导向组件包括:第一导向板和第二导向板;所述第一导向板、第二导
向板间具有间隙,形成所述导向通道。
16.可选地,所述第一导向板包括:入口宽度调节板和固定板;所述第二导向板包括:出口宽度调节板和活动板;所述入口宽度调节板、出口宽度调节板分别位于所述导向通道的两端;
17.其中,所述固定板与所述活动板间形成所述倾斜通道部分;和/或
18.所述入口宽度调节板与所述活动板间形成所述水平通道部分;和/或
19.所述出口宽度调节板与所述固定板间形成所述水平通道部分。
20.可选地,所述入口宽度调节板、出口宽度调节板和活动板上设置有位置调节孔,其孔径大于设置在所述驱动组件上适配位置的固定孔。
21.可选地,所述倾斜通道部分的侧壁上设置有若干凸起部。
22.可选地,所述凸起部位于所述倾斜通道部分的中部。
23.可选地,所述凸起部为锯齿。
24.可选地,首个锯齿中接触所述待测轴类产品的一侧设置为倒角;其中,首个锯齿为所述待测轴类产品进入所述倾斜通道部分最先接触的锯齿。
25.可选地,还包括:
26.传感器,设置在所述导向组件上,用于在检测到待测轴类产品经过时,向控制器发送反馈信号,以使所述控制器向所述相机发送图像采集指令。
27.本公开实施例提供的技术方案可以包括以下有益效果:
28.本公开实施例提供的轴类产品的视觉检测装置,包括:具有导向通道的导向组件;驱动组件,包括传送带;所述传送带位于所述导向通道下方;图像采集组件,包括固定于所述导向组件上方的相机;其中,所述导向通道包括与所述传送带的输送方向不同的倾斜通道部分,待测轴类产品在所述传送带的驱动下,在所述倾斜通道部分转动,并由所述相机采集图像。该技术方案利用传送带输送轴类产品,轴类产品在导向通道内运动,经过与传送带的输送方向不同的倾斜通道部分,轴类产品在倾斜通道部分所在区域发生转动,从而将其全表面外观暴露在图像采集组件的视野范围,进而由相机采集图像,图像中包含了轴类产品的全表面外观信息,通过图像分析即可全面评估轴类产品的外观,实现了对轴类产品全表面外观的检测,避免表面有缺陷的产品的漏检,提高了检测的准确率。
29.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
30.结合附图,通过以下非限制性实施方式的详细描述,本公开的其它特征、目的和优点将变得更加明显。在附图中:
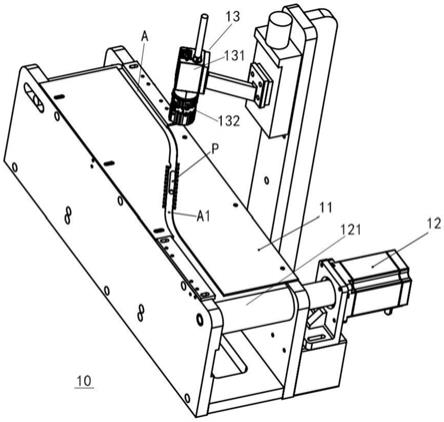
31.图1示出根据本公开实施例的轴类产品的视觉检测装置的结构示意图;
32.图2示出根据本公开实施例的导向组件的结构示意图;
33.图3示出根据本公开实施例的驱动组件的结构示意图。
具体实施方式
34.下文中,将参考附图详细描述本公开的示例性实施例,以使本领域技术人员可容
易地实现它们。此外,为了清楚起见,在附图中省略了与描述示例性实施例无关的部分。
35.在本公开中,应理解,诸如“包括”或“具有”等的术语旨在指示本说明书中所公开的特征、数字、步骤、行为、部件、部分或其组合的存在,并且不欲排除一个或多个其他特征、数字、步骤、行为、部件、部分或其组合存在或被添加的可能性。
36.另外还需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本公开。
37.针对轴类产品,要想实现对于产品的全表面外观检测,首先需要满足产品在检测区域上转动这一条件。而目前传统的送料检测装置(上文所述的机械手装置、传送带装置以及转盘装置)均无法满足使产品旋转检测这一特定条件,因此基于上述装置制作出来的设备只能完成对于产品的简单尺寸检测,而无法对轴类产品全表面外观的检测。
38.考虑到上述缺陷,本公开实施例提供的轴类产品的视觉检测装置,利用传送带输送轴类产品,轴类产品在导向通道内运动,经过与传送带的输送方向不同的倾斜通道部分,轴类产品在倾斜通道部分所在区域发生转动,从而将其全表面外观暴露在图像采集组件的视野范围,进而由相机采集图像,图像中包含了轴类产品的全表面外观信息,通过图像分析即可全面评估轴类产品的外观,实现了对轴类产品全表面外观的检测,避免表面有缺陷的产品的漏检,提高了检测的准确率。
39.下面通过具体实施例详细介绍本公开实施例的细节。
40.图1示出根据本公开实施例的轴类产品的视觉检测装置的结构示意图。如图1所示,所述轴类产品的视觉检测装置10包括:具有导向通道a的导向组件11、驱动组件12和图像采集组件13。其中,驱动组件12包括传送带121,所述传送带121位于所述导向通道a下方。图像采集组件13包括固定于所述导向组件12上方的相机131。导向通道a包括与所述传送带121的输送方向不同的倾斜通道部分a1,待测轴类产品p在所述传送带121的驱动下,在所述倾斜通道部分a1转动,并由所述相机131采集图像。
41.根据本公开的实施例,待测轴类产品p置于传送带121上,并由导向通道a进行输送方向的引导,放置待测轴类产品p(或称为产品)时,以其轴向方向与输送方向一致的方式放置,在倾斜通道部分a1所在区域,待测轴类产品p的输送方向会偏离轴向方向,这样在传送带121的驱动力的作用下产品会发生转动,倾斜通道部分a1会限制产品的活动范围,使其不会从传送带121上甩出。待测轴类产品p在倾斜通道部分a1所在区域转动可以将其与传送带121接触的外观表面曝露出来,通过相机131采集若干张图像,每张图像拍摄产品的部分外观,组合若干张图像可以获得待测轴类产品p的全表面外观,实现对诸如斑点、锈迹、划痕、凹坑、手印等多类型外观缺陷的有效检测和识别。其中,不同图像之间可以重叠产品的部分表面外观,以提高对外观缺陷识别的精度。
42.根据本公开的实施例,相机131采用高分辨率面阵相机,竖直方向上垂直于导向组件11朝下放置,位于倾斜通道部分a1所在区域正上方且与导向组件11相距一定距离,例如p毫米以保证测量相机131到导向组件11的距离以及校准相机131的水平及垂直度,横向平行于传送带121的输送方向。
43.所选取的相机131满足最大采集帧率fr大于实际应连续采集图像数目这一必要条件,且具备一定范围的光圈调节能力。这样拍摄到的图像,待测轴类产品p在外观检测上不会出现过多遗漏的情况,所具备的全表面外观识别能力也更强。
44.根据本公开的实施例,相机131配置有视觉镜头132,视觉镜头132采用长焦距、超低畸变的fa镜头,且保证选取镜头的像面尺寸大于或等于相机131的靶面尺寸,以保证视野的充分。
45.例如,定义待测轴类产品p长l,产品在倾斜通道部分a1所在区域中旋转一圈所前进的距离lr,工作距离wd,焦距f,靶面宽度w,靶面高度h,实际视野宽度w,实际视野高度h,满足公式:
46.wd/w=f/w
47.wd/h=f/h
48.在确认实际视野宽度w=l+lr+res(单位:mm)的前提下,根据上述公式计算wd来得出合适的镜头放置高度以使产品在一整个检测周期中都位于镜头视野之内。res代表相机视野宽度方向上边缘留存的冗余部分来保证产品在检测区域里不靠近边缘,例如两侧边缘各冗余10mm,则res取值为20mm,确保在实际视野宽度尽可能小的情况下也能达到一个理想的检测效果。
49.由于选取了面阵相机的关系再加上待测轴类产品p存在水平方向上长度偏长的情况,所以使用低畸变镜头来减少视野边缘区域的畸变问题,以此来提高产品尺寸检测的精度。
50.根据本公开的实施例,所述导向通道a的中部为倾斜通道部分a1(或称斜轨区域),两个端部中至少一个端部为与所述输送方向相同的水平通道部分。
51.在本公开方式中,待测轴类产品p从导向通道a的一侧输送至另一侧,输送的起始端为水平通道部分(或称入口直轨区域)可以保障待测轴类产品p在放置时,其轴向与输送方向一致而不会发生转动,减少了从传送带121上被甩出的风险。当然也可以通过控制传送带121的速率、相机131的参数等条件,而将输送的起始端也设置为倾斜通道,同样可以实现产品全表面外观的检测,此时相机131的设置可以更加的灵活,本公开对此不做限制。
52.另外,输送的终点端也可以设置为水平通道部分(或称出口直轨区域),便于轴类产品在不发生转动的情况下被收集,然后进行后续处理。当然根据实际情况,也可以设置为倾斜通道,本公开对此不做限制。
53.下面具体说明由入口直轨区域、斜轨区域、出口直轨区域组成的导向通道a的实施方式。应当理解,该实施方式作为一种示意性说明,并不构成对本公开的限制。
54.请参考图2,所述导向组件11包括:第一导向板111和第二导向板112;所述第一导向板111、第二导向板间112具有间隙,形成所述导向通道a。其中,第一导向板111、第二导向板112具有间隙的一侧,通过调整两个导向板的侧壁形状来调整导向通道a的引导方向。如图2所示,箭头所示为传送带的输送方向(以水平方向做示意性说明),第一导向板111、第二导向板112的侧壁分为三部分,两端为水平面、中部为曲面,因此导向通道a也由三部分组成,从左往右依次形成入口直轨区域、斜轨区域、出口直轨区域。
55.继续参考图2,根据本公开的实施例,所述第一导向板111包括:入口宽度调节板111
‑
a和固定板111
‑
b;所述第二导向板112包括:出口宽度调节板112
‑
a和活动板112
‑
b;所述入口宽度调节板111
‑
a、出口宽度调节板112
‑
a分别位于所述导向通道的两端;其中,所述固定板111
‑
b与所述活动板112
‑
b间形成所述倾斜通道部分;和/或所述入口宽度调节板111
‑
a与所述活动板112
‑
b间形成所述水平通道部分;和/或所述出口宽度调节板112
‑
a与所
述固定板111
‑
b间形成所述水平通道部分。
56.在本公开方式中,入口宽度调节板111
‑
a、固定板111
‑
b上设置有安装孔,通过安装孔固定于传送带121一侧,出口宽度调节板112
‑
a上设置有安装孔,通过安装孔固定于传送带121另一侧。所述入口宽度调节板111
‑
a、出口宽度调节板112
‑
a和活动板112
‑
b上设置有位置调节孔113,其孔径大于设置在所述驱动组件12上适配位置的固定孔(图中未示出)。活动板112
‑
b通过位置调节孔113固定于传送带121另一侧。通过调整入口宽度调节板111
‑
a和/或活动板112
‑
b上位置调节孔113的固定位置,实现对入口直轨区域的宽度的调整。固定板111
‑
b的位置保持不动,通过调整活动板112
‑
b上位置调节孔113的固定位置,实现对斜轨区域的宽度的调整,通过调整出口宽度调节板112
‑
a上位置调节孔113的固定位置,实现对出口直轨区域的宽度的调整。
57.根据本公开的实施例,定义直轨区域长度tl,直轨区域宽度tw。一般情况下,设计及调整满足如下要求:
58.3l<tl<3.5l
59.1.1l<tw<1.2l
60.以上两条件确保直轨中可累计的待测轴类产品p的数量适当且产品能在直轨处平稳前行。
61.对于轨道从直轨入斜轨或从斜轨出直轨的转弯半径及弧长无具体要求,但要求入斜轨后的斜线长度在一个产品长度以上,该条件用于完成对于待测轴类产品p由直转斜的过渡,即稳固产品的重心和运动方向,防止在进入斜轨区域后出现的不断震荡的现象。
62.具体地,取直轨中心直线与斜轨中心直线的连线相交于一点,定义交点角度θ,传送带121从左至右速度v,待测轴类产品p在斜轨的前进方向的速度va,待测轴类产品p在斜轨的转动线速度vr,转动角速度wr,待测轴类产品p半径为r=dia/2,dia为直径。则要求满足以下条件:
63.va=vcosθ
[0064][0065]
假定产品正常旋转满一周,则满足
[0066][0067]
根据本公开的实施例,所述倾斜通道部分a1的侧壁上设置有若干凸起部。通过设置凸起部,待测轴类产品p在转动时与凸起部接触,这样在拍摄得到的图像中,待测轴类产品p尺寸的边界能够清晰地界定,提高了产品尺寸(例如长度、直径等参数)的检测精度。例如控制相机在拍摄得到第一张图像时,待测轴类产品p的端部处于相邻凸起部间的凹陷位置,后续在进行图像处理时,即可利用图像处理工具准确标定该端部位置,检测得到的尺寸精度在0.01mm。
[0068]
根据本公开的实施例,所述凸起部位于所述倾斜通道部分a1的中部。在待测轴类产品p由入口直轨区域进入斜轨区域或者由斜轨区域进入出口直轨区域的阶段可以不设置凸起部,而仅在斜通道部分a1的中部设置凸起部,此时待测轴类产品p已经全部进入斜轨区域,设置凸起部的区域同时可作为待测轴类产品p全表面外观的检测区域,在相机131拍摄
的图片中可以实现同时检测产品尺寸以及外观。
[0069]
根据本公开的实施例,所述凸起部为锯齿。
[0070]
例如,定义凸起部设置区域同一侧各齿的齿距dt,齿长lt,齿宽wt,齿高ht,定义凸起部设置区域两侧齿间相距dtp,定义锯齿的齿数为nt。根据产品型号,上述各参数也不尽相同,考虑到齿数过于密集,则影响后续图像处理,齿数过于稀疏,则影响产品平滑过渡容易被锯齿卡住,因此,待测轴类产品p的长度范围内所设置的锯齿的数量可以为5个。
[0071]
也可以满足以下条件:
[0072]
0.8l<nt
×
lt+(nt
‑
1)
×
dt<l<nt
×
lt+(nt+1)
×
dt
[0073]
该条件保证了产品左右两端正好位于齿缝位置,为总长的测量提供便利。同时,可以对直径进行四段式测量,提高了直径测量精度。
[0074]
也可以满足以下条件:
[0075]
0.2dt<lt<0.4dt
[0076]
0.4dia<wt<0.5dia
[0077]
该条件用于提高齿缝入射光的通光量,使图像采集组件所采集的被检测产品的图像足够清晰,利于直径测量。
[0078]
也可以满足以下条件:
[0079]
0.4dia<ht<0.5dia
[0080]
该条件用于减弱双侧多个锯齿对于产品表面的潜在干扰,同时又不至于使产品在转动过程中脱离斜轨区域。
[0081]
也可以满足以下条件:
[0082]
1.1l<dtp<1.2l
[0083]
该条件既保证了产品能在检测区域中平稳转动又保证了产品运动范围的可控性。
[0084]
根据本公开的实施例,首个锯齿中接触所述待测轴类产品的一侧设置为倒角;其中,首个锯齿为所述待测轴类产品进入所述倾斜通道部分最先接触的锯齿。通过设置为倒角,用于减弱大量产品在入弯后对于该锯齿所造成的重复撞击,同时也起到减少产品震荡的作用。
[0085]
根据本公开的实施例,轴类产品的视觉检测装置还包括:传感器,设置在所述导向组件上,用于在检测到待测轴类产品经过时,向控制器发送反馈信号,以使所述控制器向所述相机发送图像采集指令。具体地,传感器可以设置在首个锯齿所在位置,也可以设置在入口直轨区域,本公开对此不做限制。
[0086]
请参考图3,驱动组件12还包括:步进电机122、电机座123、联轴器124、主动轮125、从动轮126、后壁板127、前壁板128、底板129和电机垫块130。其中,电机座123用于固定步进电机122,步进电机122通过联轴器124把扭矩传递给主动轮125,主动轮125用于驱动传送带121输送待测轴类产品p,传送带121采用pvc材质,结构稳定,表面设计为不透明白色无花纹类型,从动轮126用于被动的驱动传送带121移动和转动,同时作为张紧轮,起到束缚传送带121的作用,保证传送带121不会松动。后壁板127用于约束传送带121后侧边缘区域,前壁板128用于约束传送带前侧边缘区域,底板129起到稳固整个驱动组件12的作用,电机垫块130用于承载电机座123。
[0087]
根据本公开的实施例,步进电机122采用单个60型两相步进电机,定义扭矩t,要
求:t>3n
·
m作为最低扭矩条件,该条件保证了电机可以驱动传送带进行正常转动且传送带与联轴器不产生滑动现象。
[0088]
根据本公开的实施例,后壁板127上设置有固定孔,出口宽度调节板112
‑
a和活动板112
‑
b固定于后壁板上。
[0089]
根据本公开的实施例,前壁板128上设置有固定孔,入口宽度调节板111
‑
a和固定板111
‑
b固定于前壁板上。
[0090]
本公开实施例的轴类产品的视觉检测装置至少具有以下优点:
[0091]
(1)降低了因使用线阵相机对轴类产品进行外观检测所产生的成本。
[0092]
(2)解决了使用面阵相机对于轴类产品进行外观及尺寸检测的难题。
[0093]
(3)没有使用特殊检测方案对产品的曲面特性和端面进行破坏,检测的可扩展性良好。
[0094]
(4)一定程度上节省了相机及机械上的资源,大幅降低了装置成本。
[0095]
(5)整体方案都较为简易,且通用性强、传输速度快。
[0096]
(6)在斜轨区域内,除了上下锯齿的影响外,基本上不受其他因素干扰,一定程度上提高了检测精度。
[0097]
以上描述仅为本公开的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本公开中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本公开中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1