一种基于惯性组合导航数据的预估校正方法与流程
1.本发明涉及导航技术领域,具体涉及一种基于惯性组合导航数据的预估校正方法。
背景技术:
2.惯性导航的基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。作为第三代惯性导航传感器材料——mems(微电机系统)的出现,以及捷联惯性导航理论的发展和完善,使得导航系统的微型化得以实现。
3.惯导数据(惯性导航数据)是外来数据源,数据本身对硬件设备要求较高,如果精度不够,则数据容易出现较大偏差,特别是速度极低时更容易出现数据不准确现象。
4.另外,现有技术中还存在以下问题:
5.1、对数据的处理灵敏度不够,数据经处理后存在延后效应,无法完全满足导航流畅性需要。
6.2、在路况复杂区域(如环岛、部分转弯区域),存在数据跳跃情况,未能完全避开不合理数据。
7.因此,亟需可以解决上述技术问题的方案。
技术实现要素:
8.本发明提供一种基于惯性组合导航数据的预估校正方法,用以解决现有技术中对惯导数据处理灵敏度和精度不高的问题。
9.本发明提供一种基于惯性组合导航数据的预估校正方法,该方法包括:
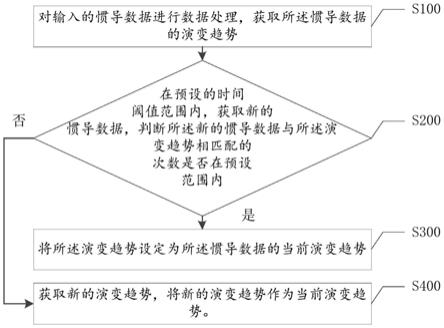
10.s100,对输入的惯导数据进行数据处理,获取所述惯导数据的演变趋势;
11.s200,在预设的时间阈值范围内,获取新的惯导数据,判断所述新的惯导数据与所述演变趋势相匹配的次数是否在预设范围内,若是,执行s300,若否,执行s400;
12.s300,将所述演变趋势设定为所述惯导数据的当前演变趋势;
13.s400,对新的惯导数据执行步骤s100,获取新的演变趋势,将新的演变趋势作为当前演变趋势。
14.优选的,所述s100包括:
15.s101,基于惯导数据确定所述惯导数据的速度变化趋势;
16.s102,基于惯导数据确定所述惯导数据的方向变化趋势;
17.s103,将所述速度变化趋势和所述方向变化趋势与当前路段的属性进行比对,确定惯导数据的综合变化趋势,将所述综合变化趋势设定为所述惯导数据的演变趋势。
18.优选的,所述s101之前包括:
19.s101-1,对输入的惯导数据的定位数据进行粗加工,判断所述定位数据是否在预设的合理数据范围内;所述定位数据包括速度数据和方向数据;所述方向数据包括经纬度
方向数据;若是,执行s101-2;若否,执行s101-3;
20.s101-2,将输入的定位数据作为输入的惯导数据;
21.s101-3,根据之前的定位数据和当前的定位数据进行比对,确定当前的定位数据,将确定的所述当前的定位数据作为输入的惯导数据。
22.优选的,所述s101-1之前,包括:
23.构建合理数据范围模型;
24.所述合理数据范围模型构建方法包括以下步骤:
25.根据路段大数据提供的数据,确定每个路段的属性;
26.根据每个路段的属性确定对应的定位数据的预设的合理数据范围;
27.相应的,所述s101-1包括:基于所述合理数据范围模型判断所述定位数据是否在预设的合理数据范围内。
28.优选的,所述路段包括路况复杂区域的特定路段;
29.所述路段属性包括:路线方向和限速范围。
30.优选的,所述s101-1包括:
31.基于惯导数据中的定位数据,判断所述定位数据中行驶速度和行驶方向是否处于合理数据范围内;所述合理数据范围包括预设速度范围和预设方向范围;
32.当所述行驶速度和行驶方向均处于预设范围内以及预设方向范围内,则所述判断结果为是,当所述行驶速度和行驶方向中任一项在合理数据范围之外,则所述判断结果为否。
33.优选的,所述s101包括:
34.导航系统基于所述惯导数据计算出短时间内导航的速度以及加速度,根据已设定的速度阈值以及加速度阈值,对新输入的惯导数据的前后速度以及加速度进行对比、校验和校正,形成速度变化趋势;
35.所述s102包括:
36.导航系统基于所述惯导数据计算出短时间内导航的方向角度加速度,根据已设定角度加速度阈值,对新输入惯导数据的方向进行合理性校验和校正,形成方向变化趋势;
37.所述s103包括:
38.根据推演计算的速度和加速度、以及方向角度加速度,分别与当前位置所在的路线属性进行比对,利用路线属性中的方向、限速进一步校正导航数据,经过校正,形成所述惯导数据的综合变化趋势。
39.优选的,所述s200包括:
40.s201,预先设置时间阈值范围;所述时间阈值范围的大小根据实际情况设定;
41.s202,在所述设定的时间阈值范围内,判断是否有新的惯导数据输入;
42.s203,若没有新的惯导数据输入,清空原有的演变趋势,对后续输入的惯导数据采用步骤s100的方式重新计算,获得新的演变趋势;
43.s204,若有新的惯导数据输入,则计算所述新的惯导数据对应的新的演变趋势,判断所述新的演变趋势与原有演变趋势是否一致,若不一致,记录不一致的次数,当所述次数达到预设的次数上限阈值时,执行步骤s400,若未达到预设的次数上限阈值,则执行步骤s300。
44.优选的,所述s201,预先设置时间阈值范围包括:
45.基于路段属性中的复杂度将路段进行等级划分;
46.根据不同等级路段对应的速度要求,构建速度周期模型;
47.根据不同等级路段的速度和加速度要求,构建加速度的概率分布模型;
48.整合速度周期模型和所述加速度的概率分布模型,形成针对对应路段的周期更新模型,基于所述周期更新模型确定时间阈值范围。
49.优选的,所述s20中判断所述新的演变趋势与原有演变趋势是否一致,包括:
50.判断所述演变趋势中速度是否与原有的速度一致;
51.若速度与原有的速度一致,则判断加速度是否与原有的加速度一致,若加速度一致,则判断方向角度加速度是否与原有的方向角度加速度一致,若方向角度加速度一致,则所述新的演变趋势与原有演变趋势是一致的;若加速度不一致,判断所述加速度是否在预设的加速度范围内,若在其范围内,判断方向角度加速度是否在预设的方向角度加速度范围内,若在其范围内,则所述新的演变趋势与原有演变趋势是一致的;若加速度或方向角度加速度任一项不在预设的范围内,则所述新的演变趋势与原有演变趋势是不一致的;
52.若速度与原有的速度不一致,则判断速度是否在预设的速度范围内,若在速度范围内,判断所述加速度是否在预设的加速度范围内,若在加速度范围内,则判断方向角度加速度是否在预设的方向角度加速度范围内,若在其范围内,则所述新的演变趋势与原有演变趋势是一致的;若速度、加速度或方向角度加速度中任一项不在预设的范围内,则所述新的演变趋势与原有演变趋势是不一致的。
53.本发明提供了一种基于惯性组合导航数据的预估校正方法,通过本发明提供的方案通过设定的时间阈值范围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足,另外,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。
54.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
55.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
56.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
57.图1为本发明实施例中一种基于惯性组合导航数据的预估校正方法的流程图;
58.图2为本发明实施例中获取惯导数据的演变趋势的方法流程图;
59.图3为本发明实施例中输入的惯导数据的校正方法的流程图。
具体实施方式
60.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
61.本发明实施例提供了一种基于惯性组合导航数据的预估校正方法,图1为本发明
实施例中一种基于惯性组合导航数据的预估校正方法的流程图,请参照图1,该方法包括以下几个步骤:
62.s100,对输入的惯导数据进行数据处理,获取所述惯导数据的演变趋势;
63.s200,在预设的时间阈值范围内,获取新的惯导数据,判断所述新的惯导数据与所述演变趋势相匹配的次数是否在预设范围内,若是,执行s300,若否,执行s400;
64.s300,将所述演变趋势设定为所述惯导数据的当前演变趋势;
65.s400,对新的惯导数据执行步骤s100,获取新的演变趋势,将新的演变趋势作为当前演变趋势。
66.上述技术方案的工作原理为:本实施例采用的方案是对持续输入的惯导数据进行计算,得到演变趋势,从而解决惯导数据有时精度不准确带来的影响。
67.需要说明的是,通过本实施例提供的方案,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。另外通过设定的时间阈值范围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足。
68.具体的,首先对输入的惯导数据进行数据处理,获取所述惯导数据的演变趋势;其次,在预设的时间阈值范围内,获取新的惯导数据,判断所述新的惯导数据与所述演变趋势相匹配的次数是否在预设范围内,若是,将所述演变趋势设定为所述惯导数据的当前演变趋势,若否,对新的惯导数据执行步骤s100,获取新的演变趋势,将新的演变趋势作为当前演变趋势。
69.上述技术方案的有益效果为:通过本实施例提供的方案通过设定的时间阈值范围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足,另外,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。
70.在另一实施例中,图2为本发明实施例中获取惯导数据的演变趋势的方法流程图,请参照图2,所述s100,对输入的惯导数据进行数据处理,获取所述惯导数据的演变趋势的过程,包括:
71.s101,基于惯导数据确定所述惯导数据的速度变化趋势;
72.s102,基于惯导数据确定所述惯导数据的方向变化趋势;
73.s103,将所述速度变化趋势和所述方向变化趋势与当前路段的属性进行比对,确定惯导数据的综合变化趋势,将所述综合变化趋势设定为所述惯导数据的演变趋势。
74.上述技术方案的工作原理为:本实施例采用的方案是基于惯导数据确定所述惯导数据的速度变化趋势和方向变化趋势,将所述速度变化趋势和所述方向变化趋势与当前路段的属性进行比对,确定惯导数据的综合变化趋势,将所述综合变化趋势设定为所述惯导数据的演变趋势。
75.具体的实施方式如下:根据短时间内输入的导航数据,计算导航速度变化趋势,计算出导航速度加速度,根据已设定的速度加速度阈值,对输入导航数据的前后速度进行对比、校验、校正;计算方向变化,计算导航方向角度加速度,根据已设定角度加速度阈值,对新输入导航数据的方向进行合理性校验、校正;根据推演计算的速度和方向加速度,同当前点位所在的路线属性进行比对,利用路线的方向、限速进一步校正导航数据。
76.上述技术方案的有益效果为:通过本实施例提供的方案通过设定的时间阈值范围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足,另外,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。
77.在另一实施例中,图3为本发明实施例中输入的惯导数据的校正方法的流程图,请参照图3,所述s101之前包括:
78.s101-1,对输入的惯导数据的定位数据进行粗加工,判断所述定位数据是否在预设的合理数据范围内;所述定位数据包括速度数据和方向数据;所述方向数据包括经纬度方向数据;若是,执行s101-2;若否,执行s101-3;
79.s101-2,将输入的定位数据作为输入的惯导数据;
80.s101-3,根据之前的定位数据和当前的定位数据进行比对,确定当前的定位数据,将确定的所述当前的定位数据作为输入的惯导数据。
81.上述技术方案的工作原理为:本实施例采用的方案是对输入的惯导数据的定位数据进行粗加工,判断所述定位数据是否在预设的合理数据范围内;所述定位数据包括速度数据和方向数据;所述方向数据包括经纬度方向数据,若是,将输入的定位数据作为输入的惯导数据;若否,根据之前的定位数据和当前的定位数据进行比对,确定当前的定位数据,将确定的所述当前的定位数据作为输入的惯导数据。
82.具体的,对输入的定位数据进行“粗加工”,比对数据的速度、方向等是否在合理区间,如果不合理则根据之前的定位数据经纬度和当前数据经纬度进行计算得出新的速度和方向。
83.上述技术方案的有益效果为:通过本实施例提供的方案通过设定的时间阈值范围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足,另外,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。
84.在另一实施例中,所述s101-1之前,包括:
85.构建合理数据范围模型;
86.所述合理数据范围模型构建方法包括以下步骤:
87.根据路段大数据提供的数据,确定每个路段的属性;
88.根据每个路段的属性确定对应的定位数据的预设的合理数据范围;
89.相应的,所述s101-1包括:基于所述合理数据范围模型判断所述定位数据是否在预设的合理数据范围内。
90.上述技术方案的工作原理为:本实施例采用的方案是构建合理数据范围模型;所述合理数据范围模型构建方法包括以下步骤:根据路段大数据提供的数据,确定每个路段的属性;根据每个路段的属性确定对应的定位数据的预设的合理数据范围;基于所述合理数据范围模型判断所述定位数据是否在预设的合理数据范围内。
91.上述技术方案的有益效果为:通过本实施例提供的方案通过设定的时间阈值范围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足,另外,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。
92.在另一实施例中,所述路段包括路况复杂区域的特定路段;
93.所述路段属性包括:路线方向和限速范围。
94.上述技术方案的工作原理为:本实施例采用的方案是所述路段包括路况复杂区域的特定路段;所述路段属性包括:路线方向和限速范围。针对路况复杂区域(例如:如环岛、部分转弯区域),一般会存在数据跳跃情况,采用本实施例的方案通过重新计算了导航演变趋势,避开不合理数据,防止原有趋势的干扰,提高了灵敏度。另外,针对该路段的特殊性,利用其限速、路段方向进一步修正了导航数据,避免了数据跳跃情况。
95.上述技术方案的有益效果为:通过本实施例提供的方案通过设定的时间阈值范围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足,另外,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。
96.在另一实施例中,所述s101-1包括:
97.基于惯导数据中的定位数据,判断所述定位数据中行驶速度和行驶方向是否处于合理数据范围内;所述合理数据范围包括预设速度范围和预设方向范围;
98.当所述行驶速度和行驶方向均处于预设范围内以及预设方向范围内,则所述判断结果为是,当所述行驶速度和行驶方向中任一项在合理数据范围之外,则所述判断结果为否。
99.上述技术方案的工作原理为:本实施例采用的方案是基于惯导数据中的定位数据,判断所述定位数据中行驶速度和行驶方向是否处于合理数据范围内;所述合理数据范围包括预设速度范围和预设方向范围;当所述行驶速度和行驶方向均处于预设范围内以及预设方向范围内,则所述判断结果为是,当所述行驶速度和行驶方向中任一项在合理数据范围之外,则所述判断结果为否。
100.具体的,对输入的定位数据进行“粗加工”,比对数据的速度、方向等是否在合理区间,如果不合理则根据之前的定位数据经纬度和当前数据经纬度进行计算得出新的速度和方向。
101.上述技术方案的有益效果为:通过本实施例提供的方案通过设定的时间阈值范围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足,另外,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。
102.在另一实施例中,所述s101包括:
103.导航系统基于所述惯导数据计算出短时间内导航的速度以及加速度,根据已设定的速度阈值以及加速度阈值,对新输入的惯导数据的前后速度以及加速度进行对比、校验和校正,形成速度变化趋势;
104.所述s102包括:
105.导航系统基于所述惯导数据计算出短时间内导航的方向角度加速度,根据已设定角度加速度阈值,对新输入惯导数据的方向进行合理性校验和校正,形成方向变化趋势;
106.所述s103包括:
107.根据推演计算的速度和加速度、以及方向角度加速度,分别与当前位置所在的路线属性进行比对,利用路线属性中的方向、限速进一步校正导航数据,经过校正,形成所述
惯导数据的综合变化趋势。
108.上述技术方案的工作原理为:本实施例采用的方案是导航系统基于所述惯导数据计算出短时间内导航的速度以及加速度,根据已设定的速度阈值以及加速度阈值,对新输入的惯导数据的前后速度以及加速度进行对比、校验和校正,形成速度变化趋势;导航系统基于所述惯导数据计算出短时间内导航的方向角度加速度,根据已设定角度加速度阈值,对新输入惯导数据的方向进行合理性校验和校正,形成方向变化趋势;根据推演计算的速度和加速度、以及方向角度加速度,分别与当前位置所在的路线属性进行比对,利用路线属性中的方向、限速进一步校正导航数据,经过校正,形成所述惯导数据的综合变化趋势。
109.具体的实施方式如下:根据短时间内输入的导航数据,计算导航速度变化趋势,计算出导航速度加速度,根据已设定的速度加速度阈值,对输入导航数据的前后速度进行对比、校验、校正;计算方向变化,计算导航方向角度加速度,根据已设定角度加速度阈值,对新输入导航数据的方向进行合理性校验、校正;根据推演计算的速度和方向加速度,同当前点位所在的路线属性进行比对,利用路线的方向、限速进一步校正导航数据。
110.上述技术方案的有益效果为:通过本实施例提供的方案通过设定的时间阈值范围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足,另外,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。
111.在另一实施例中,所述s200包括:
112.s201,预先设置时间阈值范围;所述时间阈值范围的大小根据实际情况设定;
113.s202,在所述设定的时间阈值范围内,判断是否有新的惯导数据输入;
114.s203,若没有新的惯导数据输入,清空原有的演变趋势,对后续输入的惯导数据采用步骤s100的方式重新计算,获得新的演变趋势;
115.s204,若有新的惯导数据输入,则计算所述新的惯导数据对应的新的演变趋势,判断所述新的演变趋势与原有演变趋势是否一致,若不一致,记录不一致的次数,当所述次数达到预设的次数上限阈值时,执行步骤s400,若未达到预设的次数上限阈值,则执行步骤s300。
116.上述技术方案的工作原理为:本实施例采用的方案是预先设置时间阈值范围;所述时间阈值范围的大小根据实际情况设定;在所述设定的时间阈值范围内,判断是否有新的惯导数据输入;若没有新的惯导数据输入,清空原有的演变趋势,对后续输入的惯导数据进行数据处理,获取所述惯导数据的新的演变趋势,若有新的惯导数据输入,则计算所述新的惯导数据对应的新的演变趋势,判断所述新的演变趋势与原有演变趋势是否一致,若不一致,记录不一致的次数,当所述次数达到预设的次数上限阈值时,对新的惯导数据执行步骤s100,获取新的演变趋势,将新的演变趋势作为当前演变趋势。若未达到预设的次数上限阈值,将所述演变趋势设定为所述惯导数据的当前演变趋势。
117.具体的,设定时间阈值范围,在该时间阈值范围内无导航数据输入时,清空原有演变趋势,重新计算新的演变趋势,以提高导航灵敏度。另外,若新输入的导航数据多次同原有趋势不一致,且形成了新的趋势,则舍弃原有演变趋势,采用新的演变趋势,上述多次是指设定次数上限阈值。
118.上述技术方案的有益效果为:通过本实施例提供的方案通过设定的时间阈值范
围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足,另外,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。
119.在另一实施例中,所述s201,预先设置时间阈值范围包括:
120.基于路段属性中的复杂度将路段进行等级划分;
121.根据不同等级路段对应的速度要求,构建速度周期模型;
122.根据不同等级路段的速度和加速度要求,构建加速度的概率分布模型;
123.整合速度周期模型和所述加速度的概率分布模型,形成针对对应路段的周期更新模型,基于所述周期更新模型确定时间阈值范围。
124.上述技术方案的工作原理为:本实施例采用的方案是基于路段属性中的复杂度将路段进行等级划分;根据不同等级路段对应的速度要求,构建速度周期模型;根据不同等级路段的速度和加速度要求,构建加速度的概率分布模型;整合速度周期模型和所述加速度的概率分布模型,形成针对对应路段的周期更新模型,基于所述周期更新模型确定时间阈值范围。通过对不同路段设置不同等级,而不同等级的路段对应不同的时间阈值范围,因此,对不同情况的路段进行个性化区分,进一步提升导航的灵敏度。
125.上述技术方案的有益效果为:通过本实施例提供的方案通过设定的时间阈值范围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足,另外,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。
126.在另一实施例中,所述s20中判断所述新的演变趋势与原有演变趋势是否一致,包括:
127.判断所述演变趋势中速度是否与原有的速度一致;
128.若速度与原有的速度一致,则判断加速度是否与原有的加速度一致,若加速度一致,则判断方向角度加速度是否与原有的方向角度加速度一致,若方向角度加速度一致,则所述新的演变趋势与原有演变趋势是一致的;若加速度不一致,判断所述加速度是否在预设的加速度范围内,若在其范围内,判断方向角度加速度是否在预设的方向角度加速度范围内,若在其范围内,则所述新的演变趋势与原有演变趋势是一致的;若加速度或方向角度加速度任一项不在预设的范围内,则所述新的演变趋势与原有演变趋势是不一致的;
129.若速度与原有的速度不一致,则判断速度是否在预设的速度范围内,若在速度范围内,判断所述加速度是否在预设的加速度范围内,若在加速度范围内,则判断方向角度加速度是否在预设的方向角度加速度范围内,若在其范围内,则所述新的演变趋势与原有演变趋势是一致的;若速度、加速度或方向角度加速度中任一项不在预设的范围内,则所述新的演变趋势与原有演变趋势是不一致的。
130.上述技术方案的工作原理为:本实施例采用的方案是判断所述演变趋势中速度是否与原有的速度一致;若速度与原有的速度一致,则判断加速度是否与原有的加速度一致,若加速度一致,则判断方向角度加速度是否与原有的方向角度加速度一致,若方向角度加速度一致,则所述新的演变趋势与原有演变趋势是一致的;若加速度不一致,判断所述加速度是否在预设的加速度范围内,若在其范围内,判断方向角度加速度是否在预设的方向角度加速度范围内,若在其范围内,则所述新的演变趋势与原有演变趋势是一致的;若加速度
或方向角度加速度任一项不在预设的范围内,则所述新的演变趋势与原有演变趋势是不一致的;若速度与原有的速度不一致,则判断速度是否在预设的速度范围内,若在速度范围内,判断所述加速度是否在预设的加速度范围内,若在加速度范围内,则判断方向角度加速度是否在预设的方向角度加速度范围内,若在其范围内,则所述新的演变趋势与原有演变趋势是一致的;若速度、加速度或方向角度加速度中任一项不在预设的范围内,则所述新的演变趋势与原有演变趋势是不一致的。
131.采用上述方案可以更加精确的计算或区分新的演变趋势与原有的演变趋势之间的关系,根据两者的关系进一步确定是采用新的演变趋势还是原有的演变趋势,从而解决惯导数据有时精度不准确的问题。
132.上述技术方案的有益效果为:通过本实施例提供的方案通过设定的时间阈值范围,重新计算了导航演变趋势,防止原有趋势的干扰,提高了灵敏度,导航流畅性得到了满足,另外,对于惯导数据持续输入,推算导航数据演变趋势,对新输入的导航数据进行预估和校正,防止异常数据或不合理数据影响导航。
133.在另一实施例中,基于路段拥堵信息的相关数据,确定每条路段的综合参数,获取每条路段的综合参数的公式如下:
[0134][0135]
其中,v
ij
为第i路线第j间隔的实际运行速度,v
ij
′
为第i路线第j间隔的参考运行速度,i=1,2
…
n,j=1,2
…
m,n为总的路线数量,m为总的间隔数量,li为第i路线的权重系数,k=1,2
…
n,n为统计的第i路线的记录数目;k
ij
为客流量影响因素,t
ij
为时间成本因素,a为客流量矩阵的特征向量,α为道路拥堵信息的权重,β为乘客流量以及时间成本的权重;
[0136]
对所述综合参数进行标准化处理,获得每条路段的最终参数,所述标准化处理所采用的公式如下:
[0137][0138]
其中,xi为第i条路线的综合参数,i=1,2
…
n,n=5,ε(t)为阶跃函数。
[0139]
基于上述方法确定每个路段的拥堵情况参数,并将上述参数作为路段属性作为对路段进行等级划分或路段复杂情况的鉴定。
[0140]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1