一种自动捕捉或增强光源的三维扫描仪的制作方法
1.本发明涉及扫描技术领域,具体涉及一种自动捕捉或增强光源的三维扫描仪。
背景技术:
2.三维扫描仪是一种科学仪器,用来侦测并分析现实世界中物体或环境的形状(几何构造)与外观数据(如颜色等性质)。搜集到的数据常被用来进行三维重建计算,在虚拟世界中创建实际物体的数字模型。这些模型具有相当广泛的用途,举凡工业设计、瑕疵检测、逆向工程、机器人导引、地貌测量、医学信息、生物信息、刑事鉴定、数字文物典藏、电影制片、游戏创作素材等等都可见其应用。
3.三维扫描仪的制作并非仰赖单一技术,各种不同的重建技术都有其优缺点,成本与售价也有高低之分。并无一体通用之重建技术,仪器与方法往往受限于物体的表面特性。例如光学技术不易处理闪亮、镜面或半透明的表面,而激光技术不适用于脆弱或易变质的表面。
4.而通过三维扫描仪创建物体几何表面的点云,这些点可用来插补成物体的表面形状,越密集的点云进行逆向建模。现根据扫描物以及明暗的判断和区分,同时根据扫描场景的判断,进行调节内部光源。现有专利号为cn104165600a名为一种无线手持3d激光扫描系统的专利,该专利利用三目摄像与三束激光相结合的定位与采集方法,可实现对目标物体的快速定位与准确测量;同时自适应背景光源补偿,保证稳定的测量光源环境。但是针对该方案,未针对扫描物的明暗和扫描物是否反光和曝光进行判断和处理,直接进行光补偿,这样扫描易曝光过度点云不易显现,不利于后续打印。
技术实现要素:
5.本方案的目的在于提供一种自动捕捉或增强光源的三维扫描仪,以解决未根据扫描物明暗和反光情况直接光补偿而造成曝光等光斑的问题。
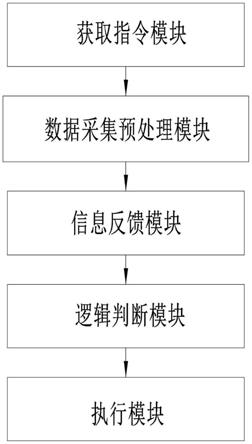
6.为了达到上述目的,本方案提供一种自动捕捉或增强光源的三维扫描仪,包括:获取指令模块,控制器控制扫描仪获取扫描采集指令;同时扫描仪镜头捕捉扫描物;数据采集预处理模块,扫描仪根据获得到的扫描采集指令,并进行数据采集,收集扫描物的物理信息;对扫描物进行扫描,同时根据扫描物的明暗和反光情况进行信息采集的预处理;信息反馈模块,根据采集到的扫描物信息进行采实时反馈;逻辑判断模块,经由反馈到的信息进行判断,由处理器输出指令;执行模块,收集控制器输出的特定指令,由软件进行三维建模;所述数据采集预处理模块包括光源调节子系统;所述光源调节子系统根据所述扫描仪扫描判断扫描物的明暗以及曝光情况进行调节。
7.本方案有益效果:本方案利用数据的采集,实现对扫描物明暗的判断采集,而后通
过信息反馈进行传输彩色信息,在通过判断模块进行明暗与反光的斑点的判断,而后输出信号。同时执行模块根据对数据的采集预处理,进行光源子系统的调节,从而实现光源的变化。
8.进一步,所述扫描仪镜头捕捉包括:对焦和角度调节。实现精准的实时聚焦,防止后续出现模糊的现象,影响扫描的效果。
9.进一步,所述物理信息包括:扫描物的大小、形状和结构。得到扫描物的具体信息。
10.进一步,所述预处理方法包括:扫描所有点云的采集和拼接。扫描后得到的并非具体的模型软件,而是根据具体特征,得到无数点,构成的点云图形。而后通过三维建模中逆向建模,通过扫描到的点云进行收集和拼接,在建模软件中进行逆向建模,形成具体的三维模型。
11.进一步,所述数据采集预处理模块包括用于扫描物的明暗和反光情况进行信息采集的ccd相机;所述光源调节子系统包括:光源;所述光源为led灯,且铰接设置在扫描仪内部;所述执行模块控制光源转动。
12.进一步,所述光源调节子系统包括:镜头采集模块,通过ccd相机对扫描物的明暗、阴影以及光斑的情况进行采集和收集;子系统反馈模块,且镜头采集定位,传输采集信息实时传输至处理器中;子系统判断模块,处理器判断明暗、阴影以及光斑的情况,判断定位的二维图形中曝光的明暗的位置,实时传输具体曝光或阴影点位,实时定位具体位置,并传输点位至子系统执行模块中;子系统执行模块,经由处理器判断。具体到二维图片定位具体位置,对照扫描物,执行调节led灯。
13.进一步,所述子系统执行模块包括反馈信号,且传输至镜头采集模块。对调节后的二维图形进行再次判断,对照之前的情况进行再次对应点位扫描。
14.进一步,所述数据采集预处理模块内包括识别子系统,识别子系统包括:图像处理子模块,对照扫描物的二维图形进行灰度或二值化的处理;查询子模块,查询处理后图片中色彩区别的所有点,并传输信号至处理器中;逻辑判断子模块,由处理器判断是否形成闭合多边形;筛分子模块,筛分闭合多边形的具体定位,筛选出在二维图片中扫描物轮廓内部的闭合多边形;确定光斑子模块,先行条件为扫描照射的光源和全彩扫描镜头不动的情况下,对照先后不同角度扫描物的二维图形。
15.在扫描照射的光源和全彩扫描镜头不动的情况下,保证照射的条件相同。经由调节扫描物,判断先后图形中闭合多边形是否处于同一位置,若是同一位置,则判定为光斑。利用识别子系统进行光斑的判断,能够更好的对照扫描物,进行更好的扫描过程。
附图说明
16.图1为本发明实施例的结构示意图。
17.图2为本发明实施例的光源调节子系统的结构示意图。
18.图3为本发明实施例的识别子系统的结构示意图。
具体实施方式
19.下面通过具体实施方式进一步详细说明:如附图1所示:一种自动捕捉或增强光源的三维扫描仪,包括:获取指令模块,控制器控制扫描仪获取扫描采集指令;同时扫描仪镜头捕捉扫描物;其中,在对扫描物进行扫描过程,扫描仪镜头通过对焦和角度调节进行捕捉扫描物,实现精准的实时聚焦,防止后续出现模糊的现象,影响扫描的效果。
20.数据采集预处理模块,扫描仪根据获得道德扫描采集指令,并进行数据采集,收集扫描物的物理信息;对扫描物进行扫描,同时根据扫描物的明暗和反光情况进行信息采集的预处理;而后通过镜头对扫描物的物理信息进行判断后进行扫描,包括:扫描物的大小、形状和结构。充分的扫描到物体的特征信息。
21.信息反馈模块,根据采集到的扫描物信息进行采实时反馈;反馈到处理器中扫描物的所有信息。
22.逻辑判断模块,经由反馈到的信息进行判断,由处理器输出指令;执行模块,收集控制器输出的特定指令,由软件进行三维建模;扫描后得到的并非具体的模型软件,而是根据具体特征,得到无数点,构成的点云图形。
23.而后通过三维建模中逆向建模,通过扫描到的点云进行收集和拼接,在建模软件中(例如solidworks或nx)进行逆向建模,形成具体的三维模型。
24.如图2所示:数据采集预处理模块包括光源调节子系统;所述光源调节子系统根据所述扫描仪扫描判断扫描物的明暗以及曝光情况进行调节。
25.如图2所示:数据采集预处理模块包括用于扫描物的明暗和反光情况进行信息采集的ccd相机;所述光源调节子系统包括:光源;所述光源为led灯,且铰接设置在扫描仪内部;所述执行模块控制光源转动。
26.光源调节子系统,包括:镜头采集模块,通过ccd相机对扫描物的明暗、阴影以及光斑的情况进行采集和收集;其中具体涉及形成二维图形,判断图形中扫描物的信息。
27.子系统反馈模块,且镜头采集定位,传输采集信息实时传输至处理器中;子系统判断模块,处理器判断明暗、阴影以及光斑的情况,判断定位的二维图形中曝光或明暗的位置,实时传输具体曝光或阴影点位,实时定位具体位置,并传输点位至子系统执行模块中;子系统执行模块,经由处理器判断。具体到二维图片定位具体位置,对照扫描物,
执行调节led灯。
28.子系统执行模块包括反馈信号,且传输至镜头采集模块。对调节后的二维图形进行再次判断,对照之前的情况进行再次对应点位扫描。
29.例如,在二维扫描图片中,扫描曝光过度时,出现光斑颚情况,经由处理器判断具体位置时,子系统执行模块调节转动led灯,实现角度上差异,同时减小led灯的亮度,再通过镜头采集到的模块对扫描物进行再次采集,减小直接对照造成的光斑情况。能够增强对此处扫描的细节。
30.再例如,若是在二维扫描图中,出现阴影的情况,影响后续扫描的点云,处理器判断定位对应点位的暗度过低,传输信号至子系统执行模块中,子系统执行模块调节led灯转动,同时增强led灯亮度,镜头采集到的模块对扫描物进行再次采集,增强对此处扫描的细节。
31.如图3所示:对于扫描过程出现光斑情况,数据采集预处理模块内包括识别子系统,识别子系统包括:图像处理子模块,对照扫描物的二维图形进行灰度或二值化的处理;查询子模块,查询处理后图片中色彩区别的所有点,并传输信号至处理器中;逻辑判断子模块,由处理器判断是否形成闭合多边形;筛分子模块,筛分闭合多边形的具体定位,筛选出在二维图片中扫描物轮廓内部的闭合多边形;确定光斑子模块,先行条件为扫描照射的光源和全彩扫描镜头不动的情况下,对照先后不同角度扫描物的二维图形。
32.在扫描照射的光源和全彩扫描镜头不动的情况下,保证照射的条件相同。经由调节扫描物,判断先后图形中闭合多边形是否处于同一位置,若是同一位置,则判定为光斑。
33.利用识别子系统进行光斑的判断,能够更好的对照扫描物,进行更好的扫描过程。
34.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1