全向多波束探鱼仪发射探测信号扫描发射方法及系统与流程
1.本发明涉及扫描探测技术领域,特别是涉及一种全向多波束探鱼仪发射探测信号扫描发射方法及系统。
背景技术:
2.探鱼仪作为海洋渔业中使用最广泛、最典型的助渔仪器之一,是利用水声学方法进行海洋渔业捕捞作业过程探测鱼群的主要工具。全方位多波束探鱼仪利用圆柱型或圆环型换能器阵,可以实现多波束进行以渔船为中心的水平360度鱼群探测,大大提高了捕捞过程中鱼群探测范围,提高捕捞效率。全方位多波束探鱼仪发射过程可以进行全向发射,也可以进行指向性发射。全向发射过程方式发射时间短,盲区小,但发射信号指向性差,影响系统探测距离。指向性发射可以进行远距离水平方向扫描,缺点是存在较大的探测盲区。传统指向性发射时,以探鱼仪圆柱型或圆环型换能器阵为中心,将探测区域划分成为多个扫描扇区,在每个扇区进行多波束扫描,但由于波束成形特性的原因,当扫描角度加大时,波束成形效果较差,表现波束主瓣展宽,旁瓣增高,指向性增益降低,影响整个区域探测信号扫描的均匀分布,降低探测成像精度。
技术实现要素:
3.本发明的目的是提供一种全向多波束探鱼仪发射探测信号扫描发射方法及系统,以增强发射信号的指向性以及探测区域扫描的均匀性。
4.为实现上述目的,本发明提供了一种全向多波束探鱼仪发射探测信号扫描发射方法,所述方法包括:
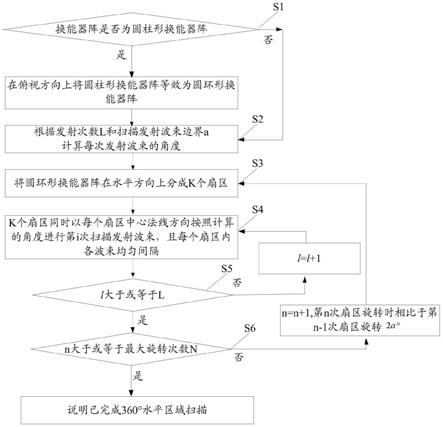
5.步骤s1:判断换能器阵为圆柱形换能器阵还是圆环形换能器阵;如果选取的是圆柱形换能器阵,则在俯视方向上将圆柱形换能器阵等效为圆环形换能器阵,并执行“步骤s2”;如果选取的是圆环形换能器阵,则执行“步骤s2”;
6.步骤s2:根据发射次数l和扫描发射波束边界a计算每次发射波束的角度;
7.步骤s3:将圆环形换能器阵在水平方向上分成k个扇区;
8.步骤s4:k个扇区同时以每个扇区中心法线方向按照计算的角度进行第l次扫描发射波束,且每个扇区内各波束均匀间隔;
9.步骤s5:判断l是否大于或等于l;如果l大于或等于l,则说明发射波束已结束,则执行“步骤s6”;如果l小于l,则令l=l+1,返回“步骤s4”;
10.步骤s6:判断扇区旋转次数n是否大于或等于最大旋转次数;如果扇区旋转次数n大于或等于最大旋转次数,则说明已完成360
°
水平区域扫描;如果扇区旋转次数n小于最大旋转次数,则令n=n+1,第n次扇区旋转时相比于第n
‑
1次扇区旋转2a
°
,并返回“步骤s3”。
11.可选地,扫描发射波束的范围为
‑
a到+a,其中,a=360
°
/(2*k*n),n为最大旋转次数,并且a小于30
°
。
12.可选地,所述根据发射次数l和扫描发射波束边界a计算每次发射波束的角度,具
体包括:
13.判断发射次数l是否为偶数;如果发射次数l为偶数,则根据ba(i)=a/l
‑
a*i/2l计算发射波束的角度;其中,ba(i)表示第i次发射波束的角度;如果发射次数l为偶数,则根据ba(i)=a*i/l计算发射波束的角度;其中,
14.本发明还提供一种全向多波束探鱼仪发射探测信号扫描发射系统,所述系统包括:
15.第一判断模块,用于判断换能器阵为圆柱形换能器阵还是圆环形换能器阵;如果选取的是圆柱形换能器阵,则在俯视方向上将圆柱形换能器阵等效为圆环形换能器阵,并执行“发射波束角度计算模块”;如果选取的是圆环形换能器阵,则执行“发射波束角度计算模块”;
16.发射波束角度计算模块,用于根据发射次数l和扫描发射波束边界a计算每次发射波束的角度;
17.扇区划分模块,用于将圆环形换能器阵在水平方向上分成k个扇区;
18.扫描发射模块,用于k个扇区同时以每个扇区中心法线方向按照计算的角度进行第l次扫描发射波束,且每个扇区内各波束均匀间隔;
19.第二判断模块,用于判断l是否大于或等于l;如果l大于或等于l,则说明发射波束已结束,则执行“第三判断模块”;如果l小于l,则令l=l+1,返回“扫描发射模块”;
20.第三判断模块,用于判断扇区旋转次数n是否大于或等于最大旋转次数;如果扇区旋转次数n大于或等于最大旋转次数,则说明已完成360
°
水平区域扫描;如果扇区旋转次数n小于最大旋转次数,则令n=n+1,第n次扇区旋转时相比于第n
‑
1次扇区旋转2a
°
,并返回“扇区划分模块”。
21.可选地,扫描发射波束的范围为
‑
a到+a,其中,a=360
°
/(2*k*n),n为最大旋转次数,并且a小于30
°
。
22.可选地,所述发射波束角度计算模块,具体包括:
23.判断发射次数l是否为偶数;如果发射次数l为偶数,则根据ba(i)=a/l
‑
a*i/2l计算发射波束的角度;其中,ba(i)表示第i次发射波束的角度;如果发射次数l为偶数,则根据ba(i)=a*i/l计算发射波束的角度;其中,
24.根据本发明提供的具体实施例,本发明公开了以下技术效果:
25.本发明以圆环型换能器阵为中心,将探测区域划分扫描成多个扇区,在每个扇区内仅仅扫描正前方较小角度范围内的区域,这时扫描的各个波束相对质量较高,一致性较好。第n次扇区旋转时相比于第n
‑
1次扇区旋转2a
°
后重新划分探测扇区,并在这一扇区进行
较小角度范围内扫描,以此类推,完成整个360
°
水平区域扫描,实现增强发射信号的指向性以及探测区域扫描的均匀性。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
27.图1为传统多波束探鱼仪波束扫描角度波束图;
28.图2为本发明圆柱型换能器阵等效成圆环型换能器阵示意图;
29.图3为本发明全向多波束探鱼仪发射探测信号扫描发射方法流程图;
30.图4为本发明全向多波束探鱼仪发射探测信号扫描发射系统结构图;
31.图5为本发明扫描发射过程举例示意图。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.本发明的目的是提供一种全向多波束探鱼仪发射探测信号扫描发射方法及系统,以增强发射信号的指向性以及探测区域扫描的均匀性。
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
35.传统多波束探鱼仪指向性扫海,将探测区域划分成为多个扫描扇区,然后对每个扇区进行扫描,如图1所示,给出了波束扫描角度0
°
,
‑
10
°
,
‑
20
°
,
‑
30
°
,
‑
40
°
,
‑
50
°
,
‑
60
°
,
‑
70
°
的波束图,当波束扫描角度大于30
°
时,主波束变宽,旁瓣增强,当波束扫描角度大于60
°
时,旁瓣强度大于主波束强度,带来扫海探测强度误差和角度分辨率降低。当扇区数量较多时,可以减少每个扇区的扫描范围,但每个扇区参与波束成形的换能器阵子数量将减少,这样会影响波束成形指向性,降低探测范围,因此一般扇区数量划分4个以内。如果多波束探测扫海时,当采用2个扇区同时扫描,每个扇区的波束扫描范围将是以其正前方为法线
‑
90
°
到+90
°
范围内区域;当采用3个扇区同时扫描,每个扇区的波束扫描范围将是以其正前方为法线
‑
60
°
到+60
°
范围内区域,扫描区域边缘的波束成形效果有所改善,但这是指向性指数比2个扇区时降低1.7db;当采用4个扇区同时扫描,每个扇区的波束扫描范围将是以其正前方为法线
‑
45
°
到+45
°
范围内区域,扫描区域边缘的波束成形效果进一步改善,但这是指向性指数比2个扇区时降低3db;如果划分的扫描区域更多,呈现的扫海效果以此类推,即覆盖均匀性提高,探测信号强度降低。因此,传统指向性扫海扫描的均匀度和扫描波束强度之间成为一种相互制约的关系,不能达到两者兼顾的作用。
36.实施例1
37.如图3所示,本发明公开一种全向多波束探鱼仪发射探测信号扫描发射方法,所述
方法包括:
38.步骤s1:判断换能器阵为圆柱形换能器阵还是圆环形换能器阵;如果选取的是圆柱形换能器阵,则在俯视方向上将圆柱形换能器阵等效为圆环形换能器阵,并执行“步骤s2”;如果选取的是圆环形换能器阵,则执行“步骤s2”。
39.步骤s2:根据发射次数l和扫描发射波束边界a计算每次发射波束的角度。
40.步骤s3:将圆环形换能器阵在水平方向上分成k个扇区。
41.步骤s4:k个扇区同时以每个扇区中心法线方向按照计算的角度进行第l次扫描发射波束,且每个扇区内各波束均匀间隔。
42.步骤s5:判断l是否大于或等于l;如果l大于或等于l,则说明发射波束已结束,则执行“步骤s6”;如果l小于l,则令l=l+1,返回“步骤s4”。
43.步骤s6:判断扇区旋转次数n是否大于或等于最大旋转次数;如果扇区旋转次数n大于或等于最大旋转次数,则说明已完成360
°
水平区域扫描;如果扇区旋转次数n小于最大旋转次数,则令n=n+1,第n次扇区旋转时相比于第n
‑
1次扇区旋转2a
°
,并返回“步骤s3”。
44.下面对各个步骤进行详细论述:
45.步骤s2:根据发射次数l和扫描发射波束边界a计算每次发射波束的角度,具体的,判断发射次数l是否为偶数;如果发射次数l为偶数,则根据ba(i)=a/l
‑
a*i/2l计算发射波束的角度;其中,ba(i)表示第i次发射波束的角度,a表示扫描范围边界;如果发射次数l为偶数,则根据ba(i)=a*i/l计算发射波束的角度;其中,
46.步骤s4:k个扇区同时以每个扇区中心法线方向按照计算的角度进行第l次扫描发射波束,且每个扇区内各波束均匀间隔。本实施例中,扫描发射波束范围为
‑
a到+a,其中,a=360
°
/(2*k*n),n为最大旋转次数,并且a小于30
°
。
47.本实施例中,最大旋转次数、扇区的个数以及发射次数l是实验前就给定的。
48.实施例2
49.如图4所示,本发明还公开一种全向多波束探鱼仪发射探测信号扫描发射系统,所述系统包括:
50.第一判断模块401,用于判断换能器阵为圆柱形换能器阵还是圆环形换能器阵;如果选取的是圆柱形换能器阵,则在俯视方向上将圆柱形换能器阵等效为圆环形换能器阵,并执行“发射波束角度计算模块402”;如果选取的是圆环形换能器阵,则执行“发射波束角度计算模块402”;
51.发射波束角度计算模块402,用于根据发射次数l和扫描发射波束边界a计算每次发射波束的角度;
52.扇区划分模块403,用于将圆环形换能器阵在水平方向上分成k个扇区;
53.扫描发射模块404,用于k个扇区同时以每个扇区中心法线方向按照计算的角度进行第l次扫描发射波束,且每个扇区内各波束均匀间隔;
54.第二判断模块405,用于判断l是否大于或等于l;如果l大于或等于l,则说明发射
波束已结束,则执行“第三判断模块”;如果l小于l,则令l=l+1,返回“扫描发射模块404”;
55.第三判断模块406,用于判断扇区旋转次数n是否大于或等于最大旋转次数;如果扇区旋转次数n大于或等于最大旋转次数,则说明已完成360
°
水平区域扫描;如果扇区旋转次数n小于最大旋转次数,则令n=n+1,第n次扇区旋转时相比于第n
‑
1次扇区旋转2a
°
,并返回“扇区划分模块403”。
56.与实施例1相同的内容在此不再一一赘述。
57.实施例3
58.本发明采用圆柱型或圆环型换能器阵,圆柱型换能阵可以增加垂直方向的波束俯仰角控制,但在俯视方向,圆柱型换能器阵可以等效为圆环型换能器阵,如图2所示,在水平扫海过程中,水平扫描方式应当是相同的过程。另外,图2中每列或每个阵子,可以进行单独的发射控制,还可以进行指向性发射扫描,进行指向性发射扫描时按以下几步进行:
59.第一步,将换能器水平方向的阵子分成k个扇区,k个扇区同时以每个扇区中心法线方向进行扫描,扫描范围为
‑
a到+a,其中a为360
°
/2*k*n,n为正整数,并且a小于30
°
,在这个区域里依次进行l次发射,发射波束相对于扇区法线方向角度分别均匀间隔的指向性多波束扫描。
60.当l为偶数时,发射角度依次为:
61.ba(i)=a/l
‑
a*i/2l;其中,
62.当l为奇数时,发射角度依次为:
63.ba(i)=a*i/l;其中,
64.第二步,将换能器水平方向的阵子创新划分分成k个扇区,此时的k个扇区相较于第一步的k个扇区旋转了角度2a。之后,k个扇区同时以每个扇区中心法线方向进行扫描,扫描范围为
‑
a到+a,在这个区域里进行l次均匀间隔的指向性多波束扫描。l次扫描的角度相较于旋转后的扇区法线方向与步骤一中的角度一致。
65.以此类推,一共进行n次扇区旋转,进行了k*n*l次指向性波束扫描,完成对整个区域的发射多波束覆盖。
66.实施例4
67.下面举一个例子进一步说明这一扫描发射方法,如图5如果将扫描区域分成4个扇区,每个进行3次指向性波束发射,进行8次扇区旋转。也就是执行如下步骤:
68.第一步,将整个换能器阵水平分成k=4个扇区,进行n=8次扇区旋转。每一个扇区指向性扫描发射覆盖左右各a=5.625
°
范围,也就是在每个扇区
‑
5.625
°
到+5.625
°
,每个扇区分别依次发射l=3个波束,分别对应每个扇区法向
‑
3.75
°
、0
°
、+3.75
°
。
69.第二步,将换能器水平方向的阵子创新划分分成4个扇区,此时的4个扇区相较于第一步的4个扇区旋转了角度11.25
°
。之后,4个扇区同时以每个扇区中心法线方向进行扫描,扫描范围为
‑
5.625
°
到+5.625
°
,每个扇区分别依次发射l=3个波束,分别对应每个扇区法向
‑
3.75
°
、0
°
、+3.75
°
。
70.以此类推,一共进行8次扇区旋转,进行了96次指向性波束扫描,完成对整个区域
的发射多波束覆盖。8次扇区旋转之后示意图分别如图5中的(a)
‑
(h)所示。
71.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
72.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1