燃料组件水下弯扭变形测量验证装置、方法、设备及介质与流程
1.本发明属于核辐射安全与检测技术领域,具体地,是一种燃料组件水下弯扭变形测量验证装置、方法、设备及介质。
背景技术:
2.核安全是核电发展的生命线,目前大多数商业运行的核电站是采用技术比较成熟、经济效益较好、安全可靠性较高的压水堆,压水堆堆芯由燃料组件及其他相关设备构成。其中燃料组件是堆芯中最重要的部分,组件变形严重时会影响燃料棒正常插入,导致燃料棒卡棒,危及反应堆安全运行。为避免发生卡棒危险,需要在一段合理的时间间隔内,对组件变形情况进行定期检测,通过检测结果评定变形是否处于安全范围内,提醒工作人员及时地更换燃料组件。
3.目前,核电站普遍采用的是水下摄像头的方式进行组件变形检测,通过安装在组件四周的摄像装置,在外利用监视屏观察组件的变形情况,这样的方式只能通过人的肉眼粗略的判断组件的变形,不能做到以模型和精确的测量数据量化地反映变形情况,而且一般的摄像装置所用的ccd等感光器件在反应堆的特殊环境中特别容易损坏,由核电厂的反馈中可知,摄像装置的更换是相当频繁的。
技术实现要素:
4.针对现有技术中的缺陷,本发明的目的是提供一种燃料组件水下弯扭变形测量验证装置、方法、电子设备及介质,能够快速准确测量燃料组件的弯扭变形。
5.根据本发明的一个方面,提供一种燃料组件水下弯扭变形测量验证装置,包括:
6.连接部,所述连接部用于实现集成安装;
7.测量部,所述测量部安装于所述连接部,用于实现对燃料组件的测量;
8.旋转部,所述旋转部与连接部连接,其控制连接部进行旋转,从而带动测量部实现旋转;
9.升降部,所述升降部与旋转部连接,其控制旋转部进行升降,从而带动测量部实现升降;
10.所述旋转部结合升降部,使得测量部升降和旋转,实现对燃料组件上、下、左、右全方位测量。
11.所述连接部包括连接杆;
12.所述测量部包括两组相同的测量单元,所述两组测量单元沿着所述连接杆上下布置;每组测量单元包括一个相机模块和一个激光模块;所述相机模块和激光模块安装于所述连接杆上;
13.所述旋转部包括旋转调整座,安装于所述连接杆顶部,控制连接杆旋转;
14.所述升降部包括升降调整座,安装于所述旋转调整座顶部,控制旋转调整座升降,从而带动所述连接杆升降。
15.优选地,所述相机模块包括:
16.工业相机,所述工业相机用于采集图像;
17.镜头,所述镜头与工业相机连接;
18.相机安装板,所述相机安装板上安装连接镜头后的工业相机;
19.相机模块外壳,所述相机模块外壳将拼装完成的工业相机、镜头和相机安装板包在其内部;所述相机模块外壳的靠近镜头的一端为相机模块窗口玻璃,另一端为密封板;
20.相机模块窗口玻璃,所述相机模块窗口玻璃与相机模块外壳固定密封,光线从所述玻璃窗口进入相机;
21.密封板,所述密封板与相机模块外壳通过耐高温防水胶固定密封;
22.数据线通过耐高温防水胶进行固定密封后外接与电源直接相连;
23.优选地,所述激光模块包括:
24.激光器,所述激光器用于发射激光;
25.激光器安装板,所述激光器安装板内部安装两个激光器,两个激光器间距30mm;
26.激光模块窗口玻璃,所述激光模块窗口玻璃与激光器安装板固定密封;激光从所述玻璃窗口投出。
27.数据线通过耐高温防水胶进行固定密封后外接与电源直接相连。
28.一个所述工业相机和两个所述激光器构成双光刀线激光三角测量。采用双光刀线激光三角测量原理,每组测量单元集成两个激光器,两组测量单元集成四个激光器,三维重建后,得到四束点云数据。
29.根据本发明的第二个方面,提供一种燃料组件水下弯扭变形测量验证方法,包括:
30.通过上、下两组测量单元,采集燃料组件的两组三维重建点云数据;
31.对所述点云数据进行筛选拟合处理,获得燃料组件重建外侧点及重建外侧点的拟合平面,对拟合平面进行三面求交获得求交结果;
32.基于所述求交结果,完成燃料组件弯扭变形测量。
33.优选地,所述通过上、下两组测量单元,采集燃料组件的两组三维重建点云数据,包括:
34.s101,对上、下两组测量单元进行空气和水中多姿态标定,辨识相机参数;
35.s102,对上、下两组测量单元进行光平面标定,计算上、下两组测量单元的光平面参数;
36.s103,对上、下两组测量单元进行全局标定。
37.优选地,所述点云数据进行筛选拟合,获得燃料组件重建外侧点及重建外侧点的拟合平面,对拟合平面进行三面求交获得求交结果,包括:
38.s201,选用一组测量单元三维重建获得的两束点云数据,根据左上、左下、右上、右下四个方向,将上述两束点云拆分成左上、左下、右上、右下四段点云数据,并采用最小二乘法原理,拟合获得相应的四条直线方程;
39.将四段点云数据依次分别代入所述四条直线方程,通过方程的正负判断该点是否位于相应直线外侧;筛选获得四条直线外侧的点云数据;
40.s202,设定相邻点之间距离的阈值,通过比较相邻两点之间的距离和阈值的大小关系,将同一直线外侧点云数据拆分为多个不同椭圆弧的点云数据;
41.通过比较每段椭圆弧不同外侧点到该拟合直线的距离,确定每段椭圆弧距离拟合直线的外侧最远点;
42.s203,基于最小二乘法原理,将四段拟合直线的所有外侧最远点,根据上、下、左、右四个方向,分别拟合成上、下、左、右四个平面,将左平面、右平面、上下平面分中面(上平面和下平面之间的中间平面)进行三面求交,计算相应的边缘点;
43.s204,将s201的两束点云数据,根据左、右两个方向,拆分左、右两段点云,分别沿s203拟合的左平面、右平面法线方向进行整体偏移,对偏移后的点云数据,按照s201-s203方法,基于最小二乘法原理,进行上、下、左、右四平面拟合,将左平面、右平面、上下平面分中面进行三面求交,计算相应的中心点;
44.s205,另一组测量单元三维重建获得的两束点云数据作与s201-s204相同处理,获得相应的边缘点和中心点。
45.优选地,所述根据所述边缘点和中心点,获得燃料组件弯扭变形量,包括:以上测量单元的中心点为弯扭变形计算坐标系原点构建坐标系,以下测量单元中心点相较于上测量单元中心点的距离(bowx、bowy)作为弯曲变形数值;
46.以下测量单元的边缘点和中心点矢量相较于上测量单元的边缘点和中心点矢量的夹角(twist)作为扭曲变形数值,规定逆时针方向为正方向。
47.根据本发明的第三个方面,提供一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现上述的燃料组件水下弯扭变形测量验证方法。
48.根据本发明的第四个方面,提供一种计算机可读存储介质,所述存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由处理器加载并执行上述的燃料组件水下弯扭变形测量验证方法。
49.与现有技术相比,本发明具有如下的有益效果:
50.本发明上述的燃料组件水下弯扭变形测量验证装置和方法,具有抗干扰能力强、稳定性高、精度高、速度快的优点,可以实现燃料组件弯扭变形的实时在线测量,具备一定的水密性能。
附图说明
51.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
52.图1为本发明一实施例的燃料组件水下弯扭变形测量验证装置的结构示意图;
53.图2为本发明一实施例的燃料组件水下弯扭变形测量验证装置的结构正视图;
54.图3为本发明一实施例的燃料组件水下弯扭变形测量验证装置的结构左视图;
55.图4为本发明一较优实施例的燃料组件水下弯扭变形测量验证装置的相机模块结构示意图;
56.图5为本发明一较优实施例的燃料组件水下弯扭变形测量验证装置的激光模块结构示意图;
57.图6为本发明一较优实施例的燃料组件水下弯扭变形测量验证方法的数据处理流
程图;
58.图7为本发明一较优实施例的燃料组件水下弯扭变形测量验证方法的坐标系传递链示意图;
59.图8为本发明一较优实施例的燃料组件水下弯扭变形测量验证方法的燃料组件弯扭计算示意图。
60.图中:1为升降调整座、2为旋转调整座、3为相机模块、31为相机模块外壳、32为相机模块固定板、33为工业相机、34为镜头、35为密封板、36为相机安装板、37为相机模块窗口玻璃、4为激光模块、41为激光模块固定板、42为激光器、43为激光模块窗口玻璃、44为激光器安装板、5为连接杆。
具体实施方式
61.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
62.核燃料组件的工作环境及自身特点决定了其变形情况的测量只能选择非接触式测量方法。非接触式测量能够测工作环境特殊或表面忌伤痕的物体,被广泛应用于生产检测。基于此,本发明实施例提供一种燃料组件水下弯扭变形测量验证装置和方法,采用非接触式测量,可以实现燃料组件弯扭变形的实时在线测量。
63.具体的,本发明提供一个实施例,即燃料组件水下弯扭变形测量验证装置,包括:连接部、测量部、旋转部和升降部,其中:连接部具备集成安装功能;测量部安装于连接部,用于实现对燃料组件的测量;旋转部与连接部连接,其控制连接部进行旋转,从而带动测量部实现旋转;升降部与旋转部连接,其控制旋转部进行升降,从而带动测量部实现升降;旋转部结合升降部,使得测量部升降和旋转,实现对燃料组件上、下、左、右全方位测量。
64.参照图1、图2和图3所示,作为一个优选实施例,连接部包括连接杆5。测量部包括两组相同的测量单元,两组测量单元沿着连接杆5上下布置,两组测量单元间距500mm;其中,每组测量单元包括一个相机模块3和一个激光模块4,相机模块3和激光模块4安装于连接杆5上。旋转部包括旋转调整座2,固定于连接杆5顶部,控制连接杆5旋转;升降部包括升降调整座1,设置于旋转调整座2顶部,控制旋转调整座2升降,从而控制连接杆5升降。如图1中所示,两组测量单元的相机模块3和激光模块4分别通过相机模块固定板32和激光模块固定板41固定于连接杆5,相机模块3和激光模块4之间保持一定的夹角和距离。升降调整座1可升降连接杆5,旋转调整座2可旋转连接杆5,二者搭配使用,可保证连接杆5上的相机模块3和激光模块4进行升降和旋转,实现对燃料组件的上、下、左、右全方位检测。
65.具体的,本实施例中的连接杆5为一根竖向放置的杆件,可以采用8080铝合金型材,总长1500mm。当然,在其他实施例中,也可以采用其他材料制成其他长度。
66.具体的,本实施例中的相机模块3和激光模块4之间夹角27
°
,间距300mm。当然,在其他实施例中,也可以采用其他的夹角和间距。
67.参照图4所示,为本发明一较优实施例的燃料组件水下弯扭变形测量验证装置的相机模块结构示意图。本实施例中,相机模块包括:相机模块外壳31、工业相机33、镜头34、
密封板35、相机安装板36以及相机模块窗口玻璃37,其中:工业相机33用于采集图像;镜头34与工业相机33连接;相机安装板36用于安装连接镜头34后的工业相机33;相机模块外壳31将拼装完成的工业相机33、镜头34和相机安装板36包在其内部,且相机模块外壳31的靠近镜头34的一端为相机模块窗口玻璃37,另一端为密封板35。相机模块窗口玻璃37、密封板35均使用耐高温防水胶与相机模块外壳31实现固定密封,数据线通过耐高温防水胶进行固定密封后外接与电源直接相连。
68.参照图5所示,为本发明一较优实施例的燃料组件水下弯扭变形测量验证装置的激光模块结构示意图。本实施例中,激光模块包括:激光器42、激光模块窗口玻璃43和激光器安装板44,激光器42用于发射激光;激光器安装板44内部安装两个激光器42。可见,将2个激光器42置于激光器安装板44,激光模块窗口玻璃43通过耐高温防水胶进行固定密封,数据线通过耐高温防水胶进行固定密封后外接与电源直接相连。基于激光扫描测量的燃料组件非接触式测量方式,具有抗干扰能力强、稳定性高、精度高、速度快的优点,不需要外加其他照明设施,可扫描测量燃料组件轮廓的精确值。
69.具体的,本实施例中的两个激光器42间距30mm。当然,在其他实施例中,也可以采用其他的间距。
70.基于上述的优选实施例,将实施例中的燃料组件水下弯扭变形测量验证装置通过吊装方式搭放在燃料井上平面,然后吊装燃料组件进入测量区域,通过调整升降调整座1和旋转调整座2,保证线激光投射燃料组件多根燃料棒表面,然后通过计算机控制测量单元进行图像获取,并通过计算机进行后续计算。
71.在本发明另一实施例中,还提供一种燃料组件水下弯扭变形测量验证方法,该方法采用图1-5的任一项燃料组件水下弯扭变形测量验证装置进行。具体的,该验证方法包括:通过上、下两组测量单元,采集燃料组件的两组三维重建点云数据;对点云数据进行筛选处理,获得燃料组件重建外侧点,基于燃料组件重建外侧点进行平面拟合,基于拟合平面进行三面求交;根据求交结果获得燃料组件弯扭变形量。
72.图6为本发明一较优实施例的燃料组件水下弯扭变形测量验证方法的数据处理流程图。如图6所示,本优选实施例中,燃料组件水下弯扭变形测量验证方法包括如下步骤:
73.s1,基于相机标定结果,三维数据重建获取点云数据;
74.s2,基于s1得到的点云数据,拟合左上、左下、右上、右下四条直线,定义直线外侧方向;
75.s3,基于s2得到的四条直线,求解每条直线上每段椭圆弧距离该直线的外侧最远点;
76.s4,基于s3得到的外侧最远点拟合上、下、左、右四个平面;
77.s5,对s4拟合的四个平面求交,计算边缘点和中心点;
78.s6,基于s5得到的边缘点和中心点,进行坐标归一化,计算燃料棒变形。
79.具体的,上述s1,基于相机标定结果,三维数据重建获取点云数据,包括:
80.s101,对上、下两组测量单元进行空气和水中多姿态标定,辨识相机参数;
81.s102,对上、下两组测量单元进行光平面标定,计算上、下两组测量单元的光平面参数;
82.s103,对上、下两组测量单元进行全局标定。
83.本实施例完成相机标定后,启动硬件设备,采集获取燃料组件的三维重建点云数据。
84.在一实施例中,为了更好实现相机标定,s101中,对上、下两组测量单元进行空气和水中多姿态标定,辨识相机参数,优选在空气中,采用基于张正友标定原理进行标定。具体的:
85.在空气中,采用镜头三阶畸变模型,对上、下2组测量单元分别进行多姿态标定,采集多张不同视角的图片,利用levenberg-marquardt算法求解标定相机的非线性模型,根据单应性矩阵辨识求解相机内参。
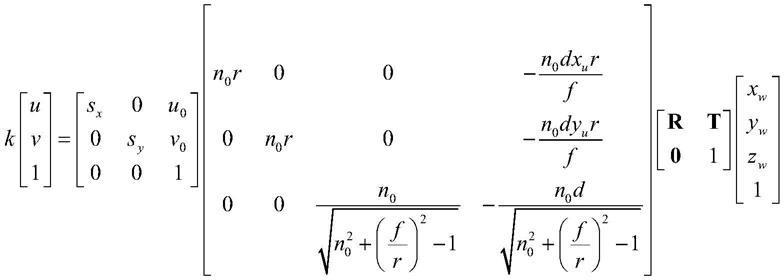
86.在水下,基于如下式所示的水下多介质折射模型数学表达式,忽略玻璃厚度影响,利用levenberg-marquardt算法,求解相机旋转矩阵和平移矩阵等外参。
[0087][0088]
其中,k是系数因子,[u v]是像素坐标系的像素坐标,[s
x sy]是图像坐标系单位距离上的像素数,[u
0 v0]是图像坐标系原点在像素坐标系下的坐标,n
water
是水折射率,n
air
是空气折射率,n0=n
water
/n
air
,f是相机焦距,[x
u yu]是图像坐标系的坐标,d是相机光心到玻璃介质距离,r表示世界坐标系到相机坐标系的旋转变换矩阵,t表示世界坐标系到相机坐标系的平移变换矩阵,[x
w y
w zw]是世界坐标系的三维坐标。
[0089]
本实施例在空气中通过采用张正友标定原理,能够保证内参标定精度,从而为后续相机标定工作结果的准确性提供前提。
[0090]
本实施例在水下通过采用水下多介质折射模型,能够保证外参标定精度,从而为后续相机重建工作结果的准确性提供保障。
[0091]
在另一实施例中,为了更好实现全局标定,s103中,对上、下两组测量单元进行全局标定可以优选以下方法实现:
[0092]
对上、下2组测量单元进行全局标定,如图7所示,上加工块坐标系为{u},下加工块坐标系为{d},上测量单元工业相机坐标系为{us},下测量单元工业相机坐标系为{ds}。基于如下数学表达式的坐标系传递链关系,建立下加工块坐标系{d}在下测量单元工业相机坐标系{ds}的位姿转换矩阵上加工块坐标系{u}在下加工块坐标系{d}的位姿转换矩阵上测量单元工业相机坐标系{us}在上加工块坐标系{u}的位姿转换矩阵继而计算出上测量单元工业相机坐标系{us}在下测量单元工业相机坐标系{ds}下的位姿转换矩阵
[0093]
[0094]
本实施例通过采用上述方法进行全局标定,能进一步保证后续2组测量单元数据的准确性,为更好实现燃料组件水下弯扭变形测量验证提供了保证。
[0095]
在相机标定完成后,通过三维重建获取点云数据,然后执行s2,拟合左上、左下、右上、右下四条直线,定义直线外侧方向。具体的,在一实施例中,选用一组测量单元三维重建获得的两束点云数据,根据左上、左下、右上、右下四个方向,将上述两束点云拆分成左上、左下、右上、右下四段点云数据,并采用最小二乘法原理,拟合获得相应的四条直线方程;将四段点云数据依次分别代入所述四条直线方程,通过方程的正负判断该点是否位于相应直线外侧,筛选获得四条直线外侧的点云数据。
[0096]
在上述实施例基础上,执行s3,求解每条直线上每段椭圆弧距离该直线的外侧最远点,可以采用如下方法:设定相邻点之间距离的阈值,将同一直线外侧的点云数据排序后,依序比较相邻点之间的距离,若两点之间距离小于阈值,则认为该两相邻点属于同一椭圆弧,若两点之间距离大于阈值,则认为该两相邻点属于不同椭圆弧,从而将同一直线外侧点云数据拆分为多个不同椭圆弧的点云数据,通过比较每段椭圆弧不同外侧点到该拟合直线的距离,确定每段椭圆弧距离拟合直线的外侧最远点。即每条拟合直线的外侧有多段椭圆弧,则对应得到多个外侧最远点。
[0097]
在上述实施例基础上,s4中,基于外侧最远点拟合上、下、左、右四个平面,即基于最小二乘法原理,将四段拟合直线的所有外侧最远点,根据上、下、左、右四个方向,分别拟合成上、下、左、右四个平面。
[0098]
具体地,s5拟合平面求交,计算边缘点和中心点,包括:
[0099]
将s4中的左平面、右平面、上下平面分中面进行三面求交,计算相应的边缘点;
[0100]
将s2的两束点云数据,根据左、右两个方向,拆分左、右两段点云,分别沿s4拟合的左平面、右平面法线方向进行整体偏移燃料组件宽度/厚度的一半,本实施例中偏移100mm。对偏移后的点云数据,按照s2-s4方法,基于最小二乘法原理,进行上、下、左、右四平面拟合,将左平面、右平面、上下平面分中面进行三面求交,计算相应的中心点。
[0101]
图8为本发明一较优实施例的燃料组件水下弯扭变形测量验证方法的燃料组件弯扭计算示意图。如图8所示,s6中,坐标归一化,计算燃料棒变形,可以采用如下方法:以上测量单元的中心点为弯扭变形计算坐标系原点构建坐标系,以下测量单元中心点相较于上测量单元中心点的距离(bowx、bowy)作为弯曲变形数值。以下测量单元的边缘点和中心点矢量相较于上测量单元的边缘点和中心点矢量的夹角(twist)作为扭曲变形数值,规定逆时针方向为正方向。从而得到燃料组件弯扭变形情况,后续可利用该装置以及上述方法对燃料组件进行水下弯扭变形的多次测量工作,用以验证该装置以及上述方法的可靠性和实用性。
[0102]
基于与上述方法的相同构思,本发明另一实施例中还提供一种电子设备,电子设备包括处理器和存储器,存储器中存储有至少一条指令、至少一段程序、代码集或指令集,至少一条指令、至少一段程序、代码集或指令集由处理器加载并执行以实现上述任一项实施例中的燃料组件水下弯扭变形测量验证方法。
[0103]
基于与上述方法的相同构思,本发明另一实施例中还提供一种计算机可读存储介质,存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,至少一条指令、至少一段程序、代码集或指令集由处理器加载并执行上述任一项实施例中的燃料组件水下弯扭
变形测量验证方法。
[0104]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。上述各优选特征在互不冲突的情况下,可以任意组合使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1