铸坯火焰切割熔渣和毛刺尺寸检测方法与流程
1.本发明涉及火焰切割技术领域,尤其涉及一种铸坯火焰切割熔渣和毛刺尺寸检测方法。
背景技术:
2.火焰切割是一种被广泛应用于钢铁工业中的粗加工技术,特别是钢材厚度大于50mm时,火焰切割是唯一经济有效的切割方式。
3.铸坯火焰切割后在切割面上下表面残留的熔渣和毛刺对成品质量有重大的影响。残留的熔渣和毛刺会在后续轧制过程中形成翘皮、夹渣等缺陷,不仅对金属板材的耐磨性、抗疲劳性、抗腐蚀性和电磁特性有不同程度影响,还会对运输辊道和初轧机的机架辊产生磨损甚至损坏,对钢铁企业造成不可估量的经济和品牌损失。因此,进行铸坯火焰切割熔渣和毛刺尺寸在线检测,将其中不满足要求铸坯调离产线另作处理,对改善轧制产品质量、保护输送辊道和轧辊等设备以及提升经济效益都有极大作用。
4.目前尚无铸坯火焰切割熔渣和尺寸检测的有效手段与技术,主要靠人工通过监控相机目测大致判断铸坯火焰切割质量是否满足要求。人工目测只能大致定性,工人根据经验判断熔渣和毛刺尺寸是否超标,没有一个定量的标准;通过监控相机目测的高温运动物体易丢失大量信息;而且对于同一铸坯,不同工人之间的判断结果受主观因素影响并不一致,这些都会导致测量结果不可靠,同时人工在线目测也会产生较大的人力成本。因此,开发一种铸坯火焰切割熔渣和尺寸在线检测装置和技术实现实时、全连续的检测,逐渐受到了钢铁企业的关注。
技术实现要素:
5.针对上述问题,本发明的目的在于提供一种铸坯火焰切割熔渣和毛刺尺寸检测方法,利用结构光视觉检测原理,结合铸坯自身的输送运动,实时测量铸坯头部和尾部三维形貌,进而提取火焰切割熔渣和毛刺尺寸,进行铸坯火焰切割质量判定,保护输送辊道和轧机轧辊,提高后续轧制产品质量。
6.本发明采用的技术方案如下:
7.本发明所提出的铸坯火焰切割熔渣和毛刺尺寸检测方法,包括以下步骤:
8.s1、在铸坯运动方向上方布置面阵相机,采用由面阵相机组成的视场覆盖铸坯整个宽度方向;
9.s2、在面阵相机前方布置结构光投射器,结构光投射器投射线结构光至铸坯表面,线结构光在铸坯运动方向上的投影须覆盖整个铸坯宽度,保证铸坯表面形貌测量的完整性,利用铸坯自身的运动,投射的线结构光相对于铸坯表面不断移动,扫描铸坯整个表面;
10.s3、扫描过程中,面阵相机快速同步拍摄带有线结构光图案的铸坯表面图像,通过图像分析保留包含铸坯头部和尾部的图像,根据三角测距原理提取铸坯头部和尾部轮廓信息,对扫描过程中铸坯头部和尾部轮廓进行拼接,获取铸坯头部和尾部三维形貌,完成铸坯
火焰切割断面即头部和尾部熔渣和毛刺尺寸的检测。
11.进一步的,所述步骤s1中,面阵相机组成的视场根据测量需求和现场条件限制确定,由单台面阵相机组成或多台面阵相机阵列拼接而成。
12.进一步的,所述步骤s2中,线结构光由激光光源或宽光谱光源投射。
13.进一步的,所述线结构光为单条线结构光或多条线结构光。
14.进一步的,所述多条线结构光由发射单条线结构光的投射器阵列组成或由单个投射器结合光学整形元件投射多条线结构光实现。
15.进一步的,所述多条线结构光中,相邻两条线结构光之间在铸坯运动方向上的投影须相连或有一定重合度,以确保铸坯表面扫描的完整性或者三维形貌检测的完整性。
16.进一步的,所述多条线结构光中的每一单条结构光,在垂直于铸坯运动方向的投影,须覆盖相机视场在铸坯运动方向上的空间窗口,以增大铸坯头尾部在此空间窗口内运动的时间长度,保证相机能够采集更多的图像数量以最大限度的获取铸坯表面轮廓数量。
17.进一步的,所述单条线结构光在铸坯表面的投射位置对应相机视场的对角线。
18.进一步的,所述面阵相机和结构光投射器在布置时,须确保轮廓的测量范围在面阵相机和结构光投射聚焦的景深范围内,以提高铸坯表面三维形貌测量精度。
19.本发明与现有技术相比具有以下有益效果:
20.本发明通过在线检测铸坯火焰切割熔渣和毛刺尺寸,对铸坯火焰切割质量进行判定,将不合格铸坯调离产线另作处理,改善后续轧制产品质量、保护输送辊道和轧辊等设备、提升企业经济效益。
附图说明
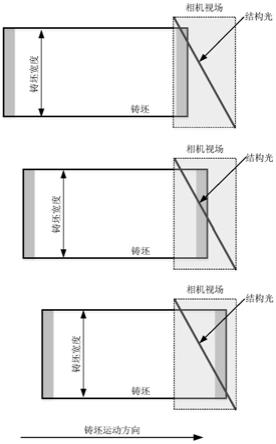
21.图1为本发明方法单条线结构光情形下相机视场与结构光对应关系示意图;
22.图2为本发明方法检测过程的示意图;
23.图3为本发明方法测量范围和精度的调整方法示意图;
24.图4为本发明方法测量速度的调整方法示意图;
25.图5为本发明方法多条线结构光情形下相机视场与结构光对应关系示意图。
具体实施方式
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
27.实施例一
28.本发明所提出的铸坯火焰切割熔渣和毛刺尺寸检测方法,如图1和2所示,具体包括以下步骤:
29.s1、在铸坯运动方向上方布置面阵相机,采用由面阵相机组成的视场覆盖铸坯整个宽度方向;其中,所述面阵相机组成的视场根据测量需求和现场条件限制确定,可由单台面阵相机组成或多台面阵相机阵列拼接而成;本实施例中,面阵相机的数量为一台;
30.s2、在面阵相机前方布置结构光投射器,结构光投射器投射线结构光至铸坯表面,
线结构光在铸坯运动方向上的投影须覆盖整个铸坯宽度,保证铸坯表面形貌测量的完整性,利用铸坯自身的运动,投射的线结构光相对于铸坯表面不断移动,扫描铸坯整个表面;
31.其中,所述线结构光由激光光源或宽光谱光源投射;
32.所述线结构光为单条线结构光或多条线结构光;本实施例中,所述线结构光为单条线结构光;当采用单条线结构光时,所述单条线结构光在铸坯表面的投射位置对应相机视场的对角线;
33.所述面阵相机和结构光投射器在布置时,须确保铸坯轮廓的测量范围在面阵相机和结构光投射聚焦的景深范围内,以提高铸坯表面三维形貌测量精度;
34.如图3所示,其中,n
p
为线结构光所在扇面的法向,n
c
为相机光轴,θ则为n
p
与n
c
的夹角;在相机视场和线结构光位置根据需求已确定情况下,面阵相机和结构光投射器位置的不同引起相机光轴方向和线结构光扇面法向的改变,根据三角测量原理,所述铸坯表面形貌的测量范围和测量精度可以通过调整线结构光所在扇面的法向和相机光轴之间的夹角实现;设置夹角越小,测量范围越小、测量精度越高;设置夹角越大,测量范围越大、测量精度越低。
35.s3、扫描过程中,面阵相机快速同步拍摄带有线结构光图案的铸坯表面图像,通过图像分析保留包含铸坯头部和尾部的图像,根据三角测距原理提取铸坯头部和尾部轮廓信息,对扫描过程中铸坯头部和尾部轮廓进行拼接,获取铸坯头部和尾部三维形貌,完成铸坯火焰切割断面即头部和尾部熔渣和毛刺尺寸的检测。
36.实施例二
37.本实施例与实施例一的区别在于:所述面阵相机的数量为两台,所述线结构光为多条线结构光,具体的,本实施例中,为提高测量速度,所述线结构光的数量为每个表面采用十条。
38.图5为铸坯的上表面测量方式,铸坯的下表面测量方式与之相同;当采用多条线结构光时,所述多条线结构光由发射单条线结构光的投射器阵列组成或由单个结构光投射器结合光学整形元件同时投射多条线结构光实现;且在所述多条线结构光中,相邻两条线结构光之间在铸坯运动方向上的投影须相连或有一定重合度,以确保铸坯表面扫描的完整性或者三维形貌检测的完整性;所述多条线结构光中的每一单条结构光,在垂直于铸坯运动方向的投影,须覆盖相机视场在铸坯运动方向上的空间窗口,以增大铸坯头尾部在此空间窗口内运动的时间长度,保证相机能够采集更多的图像数量以最大限度的获取铸坯表面轮廓数量;
39.上述采用多条线结构光的应用需求是可以提高铸坯表面轮廓测量效率和速度;当铸坯运动速度过快或者相机在铸坯运动方向可利用的视场窗口较小时,为了保证铸坯表面密集的轮廓检测数量,通过增加线结构光数量加以实现;
40.如图4所示,采用多条线结构光时,为增大相机视场内的测量时间窗口,多条线结构光中的每一条线结构光在垂直于铸坯运动方向的投影,必须覆盖相机视场在铸坯运动方向上的空间窗口;为保证铸坯表面形貌测量的完整性,多线结构光在铸坯运动方向上的投影必须覆盖整个铸坯宽度;线结构光的数量越多,测量速度越快;在相机采集速度一定和计算机处理能力足够的情况下,测量速度或轮廓提取速度与线结构光的数量成正比。
41.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范
围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1