一种毫米波雷达性能评估方法及系统与流程
1.本发明涉及性能评估技术领域,尤其涉及一种毫米波雷达性能评估方法及系统。
背景技术:
2.随着现代雷达系统越来越复杂,雷达系统性能评估模拟技术被广泛应用。雷达目标与背景回波信号的模拟在雷达系统设计、调试和验收过程中具有非常重要的作用,是雷达系统性能评估的关键环节。随着科技发展和需求的不断提高,雷达系统的复杂度越来越高,种类越来越多,面临的工作环境复杂,雷达系统的性能评估也变得越来越困难。在这种条件下,采用性能评估模拟系统成为解决该问题的有效手段。雷达系统主要用于探测目标的存在,测量目标的径向距离、径向速度和相对角度信息,目前,雷达性能评估常采用目标回波模拟方法,利用模拟的目标回波信号,可验证雷达系统的测速或测距性能,但要同时验证评估雷达系统的测速、测距和测角性能,采用常规的目标回波模拟方法是不可行的。
3.毫米波天线是毫米波雷达系统发射和接收毫米波频段电磁波信号的重要组成部分。在实际应用中,毫米波雷达探测目标时,具有一定天线波束宽度的毫米波天线发射出电磁波信号,往往位于雷达威力作用区域且在天线波束范围内的所有目标均对毫米波频段的电磁波信号进行了反射,这样毫米波雷达将同时接收到来自天线波束范围内的所有目标的反射信号,特别是处于雷达距离分辨率范围内的多个目标,雷达将无法进行分辨,认为是同一个目标的反射信号,而处于雷达距离分辨率范围之外的多个目标,雷达虽然可以进行分辨,但雷达系统目标处理的复杂度将大大增加,雷达系统在这样复杂的工作环境条件下,要对其性能指标进行精确评估是非常困难的。
4.因此,设计一种毫米波雷达性能评估系统是迫切需要解决的技术问题,特别是针对毫米波雷达中的数据质量的评估。
技术实现要素:
5.本发明的目的是针对现有技术的缺陷,提供一种毫米波雷达性能评估方法及系统。
6.为了实现以上目的,本发明采用以下技术方案:
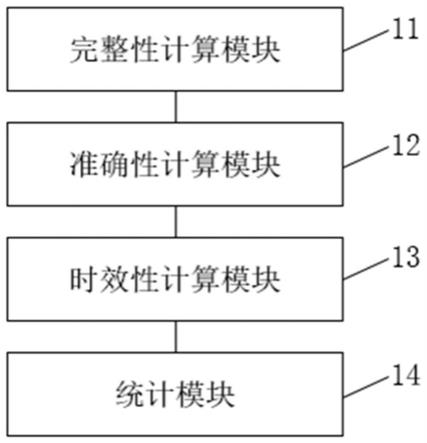
7.一种毫米波雷达性能评估系统,包括:
8.完整性计算模块,用于对与毫米波雷达相对应的字段、内容、检测距离的完整性进行计算,得到第一计算结果;
9.准确性计算模块,用于对与毫米波雷达相对应的目标、流量、速度、经纬度位置、里程桩号、车道位置、车型的准确性进行计算,得到第二计算结果;
10.时效性计算模块,用于对与毫米波雷达相对应的采集频率可调性、数据上传的时效性进行计算,得到第三计算结果;
11.统计模块,用于对第一计算结果、第二计算结果、第三计算结果进行统计,得到毫米波雷达性能评估结果。
12.进一步的,所述完整性计算模块中的字段包括目标id、时间戳、经纬度、里程桩号、所在车道、所在车道的相对位置、车速、车型。
13.进一步的,所述完整性计算模块中对与毫米波雷达相对应的字段的完整性进行计算具体是对数据中字段符合数据使用要求进行计算,表示为:
14.x=a/b
15.其中,x表示字段的完整性的计算结果;a表示数据中包含满足使用要求字段数;b表示要求的所有字段数。
16.进一步的,所述完整性计算模块中对与毫米波雷达相对应的内容的完整性进行计算具体是对毫米波雷达对数据内容修补质量及缺失程度进行计算,表示为:
[0017][0018]
其中,情形1表示毫米波雷达修补数据中车辆id正确;情形2表示毫米波雷达修补数据中车辆id错误;
[0019][0020]
其中,j表示字段序号;m表示字段序号的最大值;i表示毫米波雷达修补数据帧序号;n表示毫米波雷达修补数据帧序号的最大值;a
ij
表示帧系数;x表示毫米波雷达对数据内容修补质量及缺失程度指标值;x1表示内容完整性加权系数。
[0021]
进一步的,所述完整性计算模块中对与毫米波雷达相对应的检测距离的完整性进行计算具体是对对毫米波雷达检测目标并连续跟踪能力进行计算,表示为:
[0022][0023]
其中,o表示轨迹数量;l
p
表示轨迹p检测长度;l表示检测距离要求;x
ave
表示毫米波雷达检测能力;
[0024]
l
max
=c
[0025]
其中,c表示毫米波雷达检测范围能够达到的最大距离;l
max
表示毫米波雷达检测范围能够达到的最大距离。
[0026]
进一步的,所述准确性计算模块中对与毫米波雷达相对应的目标的准确性进行计算具体是对毫米波雷达锁定目标能力进行计算,表示为:
[0027]
y=s/t
[0028]
其中,s表示数据中同一车辆未被不同id表示的车辆数;t表示数据中实际通过车辆数;y表示目标的准确性的计算结果;
[0029]
所述准确性计算模块中对与毫米波雷达相对应的流量的准确性进行计算具体是对毫米波雷达检测多目标数量能力进行计算,表示为:
[0030][0031]
其中,d表示断面编号,b表示断面编号的最大值;c表示车道编号,a表示车道编号的最大值;s
dc
表示车道c断面d的检测车辆数;t
dc
表示车道c断面d的实际过车数;
[0032]
所述准确性计算模块中对与毫米波雷达相对应的速度的准确性进行计算具体是对毫米波雷达检测目标移动速度能力进行计算,其中速度包括纵向速度、横向速度;
[0033]
纵向速度计算表示为:
[0034][0035]
其中,w表示次数;t表示每次产生的数据帧数;s表示t的最大值;d
vwt
表示第w次数据帧t时车辆基站检测纵向速度;e
vwt
表示第w次数据帧t时毫米波雷达同步检测的纵向速度;y
vw
表示毫米波雷达检测目标纵向移动速度指标;
[0036]
横向速度计算表示为:
[0037][0038]
其中,g
hwt
表示第w次数据帧t时车辆基站检测纵向速度;h
hwt
表示第w次数据帧t时毫米波雷达同步检测的纵向速度;yhw表示毫米波雷达检测目标横向移动速度指标。
[0039]
进一步的,所述准确性计算模块中对与毫米波雷达相对应的经纬度位置的准确性进行计算具体是对毫米波雷达检测目标位置准确性能力进行计算,表示为:
[0040][0041]
其中,g表示毫米波雷达检测的数据帧序号;f表示g的最大值;lon
kg
、lon
lg
分别表示数据帧g时基站、毫米波雷达采集的经度;lat
kg
、lat
lg
分别表示数据帧g时基站、毫米波雷达采集的纬度;
[0042]
所述准确性计算模块中对与毫米波雷达相对应的里程桩号的准确性进行计算具体是对毫米波雷达检测目标位置换算为道路桩号进行计算,表示为:
[0043][0044]
其中,ig表示基站采集的车辆所在位置里程桩号;jg表示毫米波雷达检测的车辆所在位置里程桩号;z1表示里程桩号的准确性计算结果;
[0045]
所述准确性计算模块中对与毫米波雷达相对应的车型的准确性进行计算具体是对毫米波雷达对目标轮廓识别能力进行计算,表示为:
[0046][0047]
其中,r表示车型类别序号;q表示r的最大值;mr表示车型是r,且被识别为车型r的轨迹数;n表示车型r的轨迹数;z2表示车型的准确性进行计算结果。
[0048]
进一步的,所述准确性计算模块中对与毫米波雷达相对应的车道位置的准确性进行计算具体是对毫米波雷达检测车辆车道位置及所在车道相对位置进行计算,表示为:
[0049][0050][0051]
z5=0.3z3+0.7z4
[0052]
其中,x表示毫米波雷达检测为未变道且通过同步视频对比验证实际未变道的轨迹数序号;u表示x的最大值;o
x
表示轨迹x车道编号正确且车道相对位置检测均正确的数据帧数;p
x
表示轨迹x的帧数;z表示毫米波雷达检测为变道且通过同步视频对比验证实际变道的轨迹数序号;y表示z的最大值;oz表示轨迹z车道编号正确且车道相对位置检测均正确的数据帧数;pz表示轨迹z的帧数;z5表示车道相对位置计算结果;z3表示车辆未发生变道的指标值;z4表示车辆发生变道的指标值。
[0053]
进一步的,所述时效性计算模块中对与毫米波雷达相对应的采集频率可调性的时效性进行计算具体是对毫米波雷达采集频率可调节性进行计算,表示为:
[0054]
u=v/w
[0055]
其中,v表示毫米波雷达可实现的采集频率数;w表示数据使用要求的采集频率数;u表示采集频率可调性的时效性计算结果;
[0056]
所述时效性计算模块中对与毫米波雷达相对应的数据上传的时效性进行计算具体是对毫米波雷达数据采集与记录时间延误进行计算,表示为:
[0057][0058]
其中,w表示次数,e表示w的最大值;g表示数据的帧序号,f表示g的最大值;k
wg
表示第w次测试,数据帧g的基站设备记录时刻;q
wg
表示第w次测试,数据帧g毫米波雷达同步记录时刻。
[0059]
相应的,还提供一种毫米波雷达性能评估方法,包括:
[0060]
s1.对与毫米波雷达相对应的字段、内容、检测距离的完整性进行计算,得到第一计算结果;
[0061]
s2.对与毫米波雷达相对应的目标、流量、速度、经纬度位置、里程桩号、车道位置、车型的准确性进行计算,得到第二计算结果;
[0062]
s3.对与毫米波雷达相对应的采集频率可调性、数据上传的时效性进行计算,得到第三计算结果;
[0063]
s4.对第一计算结果、第二计算结果、第三计算结果进行统计,得到毫米波雷达性能评估结果。
[0064]
与现有技术相比,本发明按照数据规则要求,检测目标被赋予数值的程度评估路侧毫米波雷达的完整性,通过数据描述实际对象的真实值程度来评估路侧毫米波雷达的准确性,通过数据上传时刻与实际采集时刻的程度来评估路侧毫米波雷达的时效性,提高了评估路侧毫米波雷达的使用性能。
附图说明
[0065]
图1是实施例一提供的一种毫米波雷达性能评估系统结构图;
[0066]
图2是实施例一提供的测试车辆里程桩号获取流程图。
具体实施方式
[0067]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
[0068]
本发明的目的是针对现有技术的缺陷,提供了一种毫米波雷达性能评估方法及系统,适用于路侧毫米波雷达数据质量评价。
[0069]
实施例一
[0070]
本实施例提供一种毫米波雷达性能评估系统,包括:
[0071]
完整性计算模块11,用于对与毫米波雷达相对应的字段、内容、检测距离的完整性进行计算,得到第一计算结果;
[0072]
准确性计算模块12,用于对与毫米波雷达相对应的目标、流量、速度、经纬度位置、里程桩号、车道位置、车型的准确性进行计算,得到第二计算结果;
[0073]
时效性计算模块13,用于对与毫米波雷达相对应的采集频率可调性、数据上传的时效性进行计算,得到第三计算结果;
[0074]
统计模块14,用于对第一计算结果、第二计算结果、第三计算结果进行统计,得到毫米波雷达性能评估结果。
[0075]
在完整性计算模块11中,对与毫米波雷达相对应的字段、内容、检测距离的完整性进行计算,得到第一计算结果。
[0076]
完整性是指按照数据规则要求,检测目标被赋予数值的程度。
[0077]
字段完整性指数据中字段符合数据使用要求的度量,本实施例评估字段包含但不限于以下字段:目标id、时间戳、经纬度、里程桩号、所在车道、所在车道相对位置、车速(km/h)、车型。
[0078]
字段完整性计算方式为:
[0079]
各取高峰、平峰毫米波雷达数据,数据连续时长均不小于30分钟,按以下方式计算
指标,高峰及平峰计算结果等权平均相加,表示为:
[0080]
x=a/b
[0081]
其中,x表示字段的完整性的计算结果;a表示数据中包含满足使用要求字段数;b表示要求的所有字段数。本次评估字段包括:车辆id、时间戳、经纬度、里程桩号、所在车道及相对位置、车速、车型、数据生成方式8个字段。
[0082]
字段完整性的评分标准如下表1:
[0083]
表1
[0084]
指标值得分150.8~12<0.80
[0085]
内容完整性指对毫米波雷达对数据内容修补质量及缺失程度的度量。
[0086]
内容完整性的计算方式为:
[0087]
在大型车占比较大时段,将安装有rtk(rtk指通过基站获取信息,以达到高精度定位要求的技术)设备车辆的测试车辆,测试车辆行驶于大型车完全遮挡区域(指毫米波雷达无法检测到的区域),通过对比测试车辆采集数据与毫米波雷达修补数据间的差异评估数据内容完整性,本次评估包括对车辆id、时间戳、经纬度、所在车道、车速、车型6个字段进行评估。计算方式如下,测试次数不低于5次,多次测试计算结果等权相加,表示为:
[0088][0089]
其中,情形1表示毫米波雷达修补数据中车辆id正确;情形2表示毫米波雷达修补数据中车辆id错误;x1表示内容完整性及安全系数;
[0090][0091]
其中,j表示测试字段序号;m表示j的最大值,本次评估m=5,从1~5分别对应时间戳、经纬度、所在车道、车速、车型;i表示毫米波雷达修补数据帧序号;n表示i的最大值;a
ij
表示帧系数;x表示毫米波雷达对数据内容修补质量及缺失程度指标值;x1表示内容完整性加权系数。
[0092]
内容完整性的数据修补要求如下:
[0093]
1)时间戳误差小于1s;
[0094]
2)经纬度误差小于0.0025";
[0095]
3)毫米波雷达修补数据车道与实际车辆所在车辆位置相同;
[0096]
4)速度误差小于1km/h;
[0097]
5)毫米波雷达修补车型与实际车辆类型相同。
[0098]
内容完整性的评分标准如下表2:
[0099]
表2
[0100]
指标值得分1100.80~180.70~0.804<0.701
[0101]
需要注意的是,测试前需将rtk设备与路侧毫米波雷达设备时钟同步,且rtk数据采集频率与毫米波雷达频率调为相同。
[0102]
检测距离完整性指对毫米波雷达检测目标并连续跟踪能力的度量。
[0103]
检测距离完整性的计算方式为:
[0104]
各取高峰、平峰毫米波雷达数据,数据连续时长均不小于30分钟,按以下方式计算指标,高峰及平峰计算结果等权平均相加,表示为:
[0105][0106]
其中,o表示测试轨迹数量;l
p
表示轨迹p检测长度;l表示检测距离要求,本次评估中l=250m;x
ave
表示毫米波雷达检测能力;
[0107]
l
max
=c
[0108]
其中,c表示毫米波雷达检测范围能够达到的最大距离;l
max
表示毫米波雷达检测范围能够达到的最大距离。
[0109]
本实施例中纵向指与车辆行车方向一致的方向,方向相同为正,方向相反为负;横向指与车辆行车方向垂直的方向,垂直行车方向向左为正,向右为负行车方向距离指同一车辆,下一时刻的车辆位置坐标值与上一时刻的车辆位置坐标值的距离差值。
[0110]
检测距离完整性的评分标准如下表3:
[0111]
表3
[0112][0113]
在准确性计算模块12中,对与毫米波雷达相对应的目标、流量、速度、经纬度位置、里程桩号、车道位置、车型的准确性进行计算,得到第二计算结果。
[0114]
准确性表示数据描述实际对象的真实值程度。
[0115]
目标id准确性指对毫米波雷达锁定目标能力的度量。
[0116]
目标id准确性的计算方式为:
[0117]
各取高峰、平峰毫米波雷达数据,数据连续时长均不小于30分钟,按以下方式计算指标,高峰及平峰计算结果等权平均相加,表示为:
[0118]
y=s/t
[0119]
其中,s表示数据中同一车辆未被不同id表示的车辆数,通过同步视频人工核对;t表示数据中实际通过车辆数;y表示目标的准确性的计算结果。
[0120]
目标id准确性的评分标准如下表4:
[0121]
表4
[0122]
指标值得分0.95~1150.85~0.95100.65~0.855<0.651
[0123]
流量准确性指对毫米波雷达检测多目标数量能力的度量。本次评估指度量检测通过道路断面车辆数的准确性。
[0124]
流量准确性的计算方式为:
[0125]
各取高峰、平峰毫米波雷达数据,数据连续时长均不小于30分钟,分别按以下方式计算指标,高峰及平峰计算结果等权平均相加,表示为:
[0126][0127]
其中,d表示断面编号,b表示d的最大值,本次评估b=3,包括雷达检测范围初始阶段、中间阶段、结束阶段;c表示车道编号,a表示c的最大值,本次评估a=3;s
dc
表示车道c断面d的检测车辆数;t
dc
表示车道c断面d的实际过车数。
[0128]
流量准确性的评分标准如下表5:
[0129]
表5
[0130]
指标值得分0.90~1或1~1.1050.85~0.90或1.10~1.1530.75~0.85或1.15~1.251<0.75或>1.250
[0131]
速度准确性指毫米波雷达检测目标移动速度能力的度量,包含横向速度及纵向速度。
[0132]
速度准确性的计算方式为:
[0133]
通过计算带有rtk设备测试车辆行驶速度与毫米波雷达检测速度差值进行评估,评估过程中,测试车辆分别以不同速度行驶,计算速度准确性,计算结果平均加权相加。本次评估测试车辆分别以低速(30km/h)、中速(50km/h)、高速(70km/h)3类速度匀速行驶,且每类速度测试不小于5次,每次行驶距离不小于150m。
[0134]
纵向速度计算表示为:
[0135][0136]yv
=y
′v/e
[0137]
其中,w表示测试次数;e表示w的最大值;t表示每次测试过程中产生的数据帧数;s表示t的最大值;d
vwt
表示第w次测试数据帧t时车辆rtk检测纵向速度;e
vwt
表示第w次测试数据帧t时毫米波雷达同步检测的纵向速度;y
′v表示误差小于0.1km/h的次数;v无特定意义;y
vw
表示毫米波雷达检测目标纵向移动速度指标;
[0138]
横向速度计算表示为:
[0139][0140]
yh=y
′h/e
[0141]
其中,h无特定意义;g
hwt
表示第w次测试数据帧t时车辆rtk检测纵向速度;h
hwt
表示第w次测试数据帧t时毫米波雷达同步检测的纵向速度;y
′h表示误差小于0.1km/h的次数;y
hw
表示毫米波雷达检测目标横向移动速度指标。
[0142]
本实施例中的本次速度评估测试过程中,rtk频率调为50hz。
[0143]
速度准确性的评分标准如下表6:
[0144]
表6
[0145][0146][0147]
经纬度位置准确性指对毫米波雷达检测目标位置准确性能力的度量。本次评估毫米波雷达对动态目标位置检测的准确性。
[0148]
经纬度位置准确性的计算方式为:
[0149]
将安装rtk设备的测试车辆行驶至毫米波雷达检测范围内,对比rtk采集位置经纬度与毫米波雷达检测的车辆经纬度,以度量毫米波雷达经纬度位置的准确性。评估过程中,行驶次数不小于5次,每次行驶距离不小于200m,指标计算结果平均加权相加,表示为:
[0150][0151]
其中,g表示测试过程中毫米波雷达检测的数据帧序号;f表示g的最大值;lon
kg
、lon
lg
分别表示数据帧g时rtk、毫米波雷达采集的经度;lat
kg
、lat
lg
分别表示数据帧g时rtk、毫米波雷达采集的纬度。
[0152]
经纬度位置准确性的评分标准如表7:
[0153]
表7
[0154][0155][0156]
里程桩号准确性指对毫米波雷达检测目标位置换算为道路桩号准确性的度量。
[0157]
里程桩号准确性的计算方式为:
[0158]
通过安装有rtk设备的车辆在毫米波雷达检测范围内行驶,对比测试车辆不同时刻所在位置的里程桩号与毫米波雷达同步检测测试车辆里程桩号进行评估,表示为:
[0159][0160]
其中,ig表示rtk采集的车辆所在位置里程桩号;jg表示毫米波雷达检测的车辆所在位置里程桩号;z1表示里程桩号的准确性计算结果。
[0161]
在本实施例中,测试车辆里程桩号获取流程如图2所示,首先选取待测试里程桩号,然后手持rtk测量桩号所在位置经纬度,接着记录安装头rtk测试车辆经过此桩号时刻,最后以测试车辆通过此桩号后的行使距离换算不同时刻位置的里程桩号。其中里程桩号换算为计算数值方式:k1381+520=1381520。
[0162]
里程桩号准确性的评分标准如下表8:
[0163]
表8
[0164]
指标值得分<151~535~101>100
[0165]
车道位置准确性指对毫米波雷达检测车辆车道位置及所在车道相对位置准确性的度量。本次评估,准确性评估包含车辆换道、车辆不换道过程;所在车道相对位置准确性仅对未变道车辆进行评估。
[0166]
车道位置准确性的计算方式为:
[0167]
分别计算车辆发生变道与未变道的指标值,计算结果平均加权相加,表示为:
[0168][0169][0170]
z5=0.3z3+0.7z4[0171]
其中,x表示毫米波雷达检测为未变道且通过同步视频对比验证实际未变道的轨迹数序号;u表示x的最大值;o
x
表示轨迹x车道编号正确且车道相对位置检测均正确的数据帧数;p
x
表示轨迹x的帧数;z表示毫米波雷达检测为变道且通过同步视频对比验证实际变道的轨迹数序号;y表示z的最大值;oz表示轨迹z车道编号正确且车道相对位置检测均正确的数据帧数;pz表示轨迹z的帧数;z5表示车道相对位置计算结果;z3表示车辆未发生变道的指标值;z4表示车辆发生变道的指标值。
[0172]
车道位置准确性的评分标准如下表9:
[0173]
表9
[0174]
指标值得分大于0.90100.85~0.9060.8~0.854<0.82
[0175]
车型准确性指对毫米波雷达对目标轮廓识别能力的度量。
[0176]
车型准确性的计算方式为:
[0177]
通过视频人工对比,选取不同车型对应的毫米波雷达检测数据,各车型轨迹数均不小于200,分别按以下方式计算指标,计算结果等权平均相加,表示为:
[0178][0179]
其中,r表示车型类别序号;q表示r的最大值,本次评估q=10;mr表示车型是r,且被识别为车型r的轨迹数;n表示车型r的轨迹数;z2表示车型的准确性进行计算结果。
[0180]
车型准确性的评分标准如下表10:
[0181]
表10
[0182]
指标值得分0.90~1100.80~0.9060.70~0.802<0.700
[0183]
在时效性计算模块13中,对与毫米波雷达相对应的采集频率可调性、数据上传的时效性进行计算,得到第三计算结果。
[0184]
时效性表示描述数据上传时刻与实际采集时刻的程度。
[0185]
采集频率可调性指对毫米波雷达采集频率可调节性的度量。
[0186]
采集频率可调性的计算方式为:
[0187]
u=v/w
[0188]
其中,v表示满足数据使用要求,且毫米波雷达可实现的采集频率数;w表示数据使用要求的采集频率数,本次评估要求采集频率包含但不限于以下频率:0.1hz、1hz、2hz、5hz、10hz;u表示采集频率可调性的时效性计算结果。
[0189]
采集频率可调性的评分标准如下表11:
[0190]
表11
[0191]
指标值得分0.8~150.6~0.82<0.60
[0192]
数据上传时效性指对毫米波雷达数据采集与记录时间延误的度量。
[0193]
数据上传时效性的计算方式为:
[0194]
通过计算带有rtk设备测试车辆采集的数据时刻与毫米波雷达同步检测记录的时刻差值进行评估,表示为:
[0195][0196]
其中,w表示测试次数,e表示w的最大值;g表示每次测试数据的帧序号,f表示g的最大值;k
wg
表示第w次测试,数据帧g的rtk设备记录时刻;q
wg
表示第w次测试,数据帧g毫米波雷达同步记录时刻。
[0197]
在本实施例中,rtk测试前,需要进行rtk设备与路侧毫米波雷达设备时钟同步。
[0198]
数据上传时效性的评分标准如下表12:
[0199]
表12
[0200]
指标值得分<1s51s~3s2>3s0
[0201]
在统计模块14中,对第一计算结果、第二计算结果、第三计算结果进行统计,得到毫米波雷达性能评估结果。
[0202]
本实施例根据上述方式对每个数据进行评估,再根据评估明细表得到毫米波雷达性能评估结果;评估明细表如下表13:
[0203]
表13
[0204]
[0205]
[0206][0207]
本实施例按照数据规则要求,检测目标被赋予数值的程度评估路侧毫米波雷达的完整性,通过数据描述实际对象的真实值程度来评估路侧毫米波雷达的准确性,通过数据上传时刻与实际采集时刻的程度来评估路侧毫米波雷达的时效性,提高了评估路侧毫米波雷达的使用性能。
[0208]
实施例二
[0209]
本实施例提供一种毫米波雷达性能评估方法,包括:
[0210]
s1.对与毫米波雷达相对应的字段、内容、检测距离的完整性进行计算,得到第一计算结果;
[0211]
s2.对与毫米波雷达相对应的目标、流量、速度、经纬度位置、里程桩号、车道位置、车型的准确性进行计算,得到第二计算结果;
[0212]
s3.对与毫米波雷达相对应的采集频率可调性、数据上传的时效性进行计算,得到第三计算结果;
[0213]
s4.对第一计算结果、第二计算结果、第三计算结果进行统计,得到毫米波雷达性能评估结果。
[0214]
需要说明的是,本实施例提供的一种毫米波雷达性能评估方法与实施例一类似,在此不多做赘述。
[0215]
本实施例按照数据规则要求,检测目标被赋予数值的程度评估路侧毫米波雷达的完整性,通过数据描述实际对象的真实值程度来评估路侧毫米波雷达的准确性,通过数据上传时刻与实际采集时刻的程度来评估路侧毫米波雷达的时效性,提高了评估路侧毫米波雷达的使用性能。
[0216]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1