一种激光测量靶标、沉降监测方法、装置及存储介质与流程
本技术涉及激光测量,具体而言,涉及一种激光测量靶标、沉降监测方法、装置及计算机可读存储介质。
背景技术:
1、目前沉降观测有多种方法,其中使用静力水准仪进行沉降观测的精度很高,但是布设和维护不便,不适合长距离的野外沉降观测。
2、因此在野外沉降观测中,比较常用的方法为采用全站仪、水准仪等测量仪器对附着在被测物体上的靶标或标志物进行观测,从而得到沉降值。
3、采用全站仪和水准仪进行沉降观测时,需要人工操作,因此长距离的野外观测通常需要很多天时间,作业人员需要跋山涉水,非常辛苦。
4、采用自动全站仪进行沉降观测时,因自动全站仪设备昂贵,不适合在野外大量推广使用。
技术实现思路
1、本技术实施例的目的在于提供一种激光测量靶标、沉降监测方法、装置及存储介质,能够减少人工、物力成本,快速获取待测物是否发生沉降。
2、第一方面,本技术实施例提供了一种激光测量靶标,包括:
3、靶标,包括低反射率区域和高反射率区域;
4、双轴倾角传感器,设置在所述靶标上。
5、在上述实现过程中,靶标具有低反射率区域和高反射率区域,初始时将激光对准高反射率区域。当待测物发生水平方向上的旋转或位移时,激光会从靶标高反射率区域移动到低反射率区域,可以发现激光回光强度发生变化。同时,通过双轴倾角传感器可以判断待测物是否发生垂直方向的旋转。上述激光测量靶标结构简单,能够推广使用,减少人工、物力成本,并且能够利用其高反射率区域和低反射率区域的设置以及双轴倾角传感器快速判断待测物是否发生沉降或旋转。
6、进一步地,所述高反射率区域设置在所述激光测量靶标中间;
7、所述低反射率区域设置在所述靶标两侧。
8、在上述实现过程中,初始时将激光对准中间的高反射率区域,当待测物发生位移或旋转时,激光会从中间的高反射率区域移动到两侧的低反射率区域,激光的回光强度会发生改变。基于上述实施方式,无论待测物从哪个方向发生位移或旋转,激光的回光强度均会发生改变。
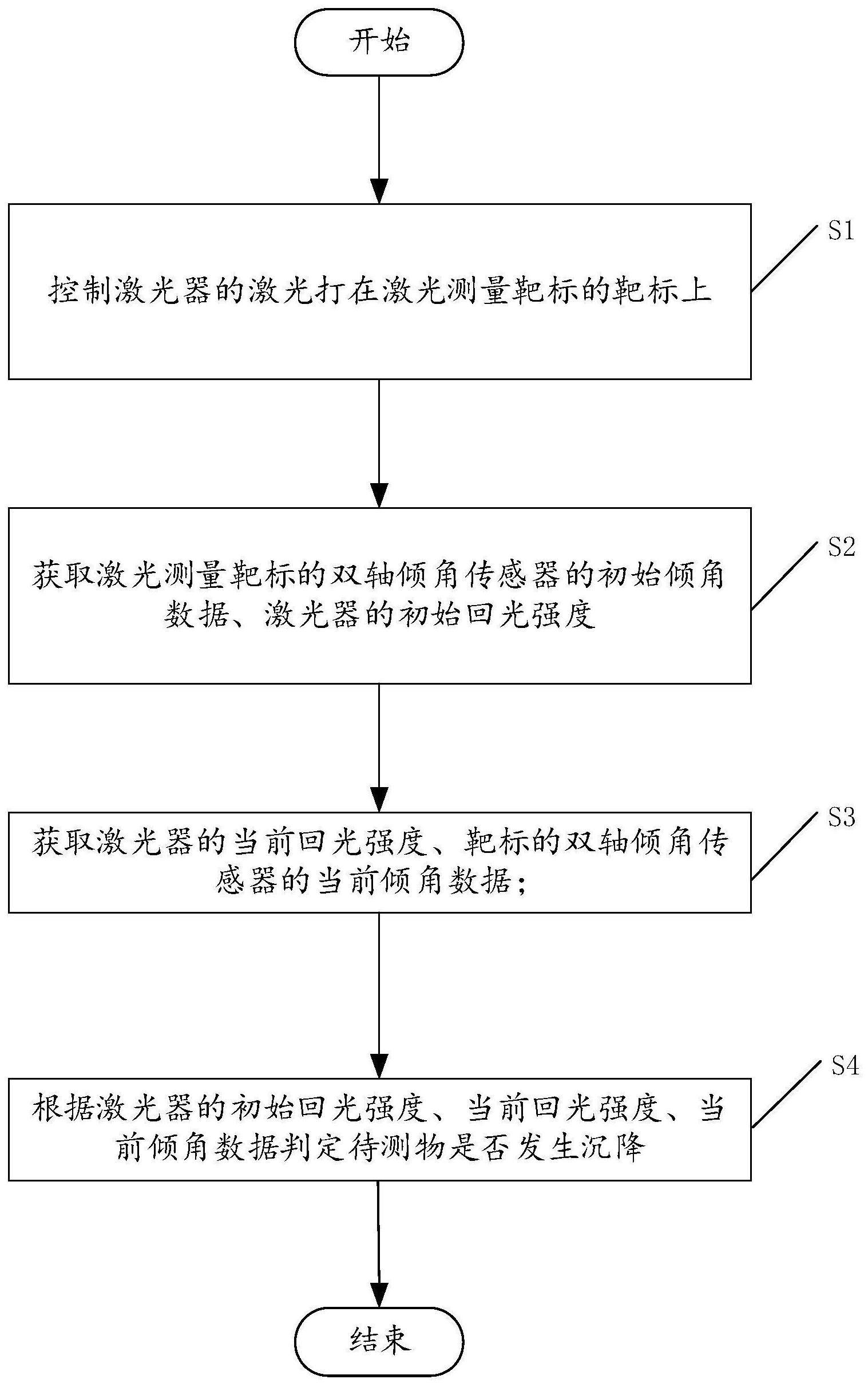
9、第二方面,本技术提供一种沉降监测方法,应用于第一方面所述的激光测量靶标,该方法包括:
10、控制激光器的激光打在所述激光测量靶标的靶标上;
11、获取所述激光测量靶标的双轴倾角传感器的初始倾角数据、所述激光器的初始回光强度;
12、获取所述激光器的当前回光强度、靶标的双轴倾角传感器的当前倾角数据;
13、根据所述激光器的初始回光强度、所述当前回光强度、所述初始倾角数据、所述当前倾角数据判定所述待测物是否发生沉降。
14、在上述实现过程中,首先将激光器的激光打在激光测量靶标的靶标上,接着,获取激光测量靶标上双轴倾角传感器的初始倾角数据,激光的初始回光强度,由于激光测量靶标上设置有低反射率区域和高反射率区域,因此,当待测物发生沉降或旋转时,初始回光强度会发生改变,并且,由于激光测量靶标随着待测物发生沉降或旋转,因此,激光测量靶标上的双轴倾角传感器的数据也会发生改变,基于激光器的初始回光强度、当前回光强度、初始倾角数据、当前倾角数据可以快速判定所述待测物是否发生沉降或旋转。
15、进一步地,所述根据所述激光器的初始回光强度、所述当前回光强度、所述初始倾角数据、所述当前倾角数据判定所述待测物是否发生沉降的步骤,包括:
16、计算所述当前倾角数据与所述初始倾角数据的差值,作为第一差值;
17、计算所述初始回光强度与所述当前回光强度的差值,作为第二差值;
18、若所述第一差值大于第一预设阈值,或者,所述第二差值大于第二预设阈值时,判定所述待测物发生沉降。
19、在上述实现过程中,由于激光测量靶标上设置有低反射率区域和高反射率区域,因此,当待测物发生沉降或旋转时,初始回光强度会发生改变,并且,由于激光测量靶标随着待测物发生沉降或旋转,因此,激光测量靶标上的双轴倾角传感器的数据也会发生改变。获取到上述数据之后,可以计算出当前倾角数据与初始倾角数据的第一差值和初始回光强度与当前回光强度的第二差值,将第一差值与第一预设阈值进行比较,将第二差值与第二预设阈值进行比较,只要上述两个差值有一个超过其对应的阈值,则可以判定待测物发生沉降或旋转,基于上述实施方式,可以快速判定待测物是否发生沉降或旋转。
20、进一步地,在所述控制激光器的激光打在所述激光测量靶标上的步骤之后,还包括:
21、获取所述激光器到所述激光测量靶标的初始激光距离;
22、在所述判定所述待测物发生沉降的步骤之后,还包括:
23、获取所述激光器到所述激光测量靶标的当前激光距离;
24、根据所述初始激光距离和所述当前激光距离获取所述待测物的沉降量。
25、在上述实现过程中,在控制激光器的激光打在激光测量靶标之后,获取激光器到激光测量靶标的初始激光距离,在判定待测物发生沉降的时候,获取当前激光器到激光测量靶标的激光距离,根据初始的激光距离和当前的激光距离可以进一步获取沉降的位移值,便于后续的分析。
26、进一步地,所述根据所述初始激光距离和所述当前激光距离获取所述待测物的沉降量的步骤,包括:
27、计算所述初始激光距离和所述当前激光距离的激光距离差值;
28、获取所述激光测量靶标与水平面的安装角度;
29、根据所述激光距离差值和所述安装角度获取所述待测物的沉降量。
30、在上述实现过程中,首先计算初始激光距离和当前激光距离的激光距离差值,再根据激光测量靶标与水平面的安装角度可以快速地获取待测物的沉降量。
31、进一步地,所述判定所述待测物发生沉降的步骤,包括:
32、若所述第一差值大于所述第一预设阈值,判定所述待测物发生倾斜;
33、或者,若所述第二差值大于所述第二预设阈值,判定所述待测物发生水平方向位移或水平方向旋转。
34、在上述实现过程中,待测物发生沉降或旋转的情况可以细分为倾斜(即垂直方向旋转)、垂直方向位移或者水平方向旋转、水平方向位移。因此,当第一差值大于第一预设阈值时,判定待测物发生倾斜,当第二差值大于第二预设阈值时,判定待测物发生水平方向位移或水平方向旋转。基于上述实施方式,能够快速地判定待测物发生倾斜或者发生水平方向位移或者水平方向旋转。
35、进一步地,所述激光测量靶标的与水平面的角度小于45°。
36、在上述实现过程中,在安装时,保证激光测量靶标与水平面的角度小于45°,可以提高测量沉降的精度。
37、第三方面,本技术提供一种沉降监测装置,所述装置包括:
38、控制模块,用于控制激光器的激光打在所述靶标上;
39、初始数据获取模块,用于获取所述靶标的双轴倾角传感器的初始倾角数据、所述激光器的初始回光强度;
40、数据获取模块,用于获取所述激光器的当前回光强度、靶标的双轴倾角传感器的当前倾角数据;
41、判断模块,用于根据所述激光器的初始回光强度、所述当前回光强度、所述初始倾角数据、所述当前倾角数据判断所述待测物是否发生沉降。
42、第四方面,本技术实施例提供的一种计算机可读存储介质,所述存储介质上存储有指令,当所述指令在计算机上运行时,使得所述计算机执行如第一方面任一项所述的方法。
43、本技术公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本技术公开的上述技术即可得知。
44、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!