一种单晶高温合金静态弹性常数的测量方法与流程
1.本发明属于测量技术领域,具体涉及一种镍基单晶高温合金在室温和高温下静态弹性常数的测量方法。
背景技术:
2.镍基单晶高温合金具备良好的高温疲劳强度和抗蠕变性能,目前乃至今后很长一段时间是航空发动机和燃气轮机涡轮叶片的核心材料。航空结构材料的弹性常数是结构设计和强度校核必不可少的参数,其准确与否直接影响结构中应力应变的模拟精度,同时也会对损伤演化与寿命预测的准确性产生重要影响。
3.单晶涡轮叶片一般通过定向凝固方法进行制备,通常利用螺旋选晶方法或籽晶法使得特定方向的晶粒得以生长。叶片轴向与择优取向的夹角被称为第一取向,由于铸造的随机性,第一取向一般被控制在10
°
以内;叶片平面围绕轴线进行旋转的角度被称为第二取向,第二取向一般难以进行控制。镍基单晶合金为γ相和γ’相两相共格结构,均为fcc结构,因此只存在3个独立的弹性常数:s
11
、s
12
和s
44
(或c
11
、c
12
和c
44
)。获得了这三个弹性常数后,即可根据涡轮叶片的实际晶体取向角度进行坐标变换计算出任意坐标系中的弹性常数矩阵,从而对相应坐标系下的涡轮叶片进行有限元计算。
4.目前已有的单晶弹性常数测量主要分为静态法和动态法,二者分别以密栅云纹干涉法和共振法为代表。但目前已有的方法存在一定的不足:首先这些方法大多要求制备出第一取向、第二取向均为[001]、[010]和[100]之一的理想单晶料板,这对于目前的铸造技术来说不可能完美达到,且这些方法中没有考虑微小偏角对于测量结果的影响。再者这些方法一般需要2种以上取向的试样开展2次以上的试验测出杨氏模量、剪切模量和泊松比,再进行反演测得3个弹性常数,试验周期较长,且多个独立试验容易对推导结果引入误差。
技术实现要素:
[0005]
鉴于现有技术的上述情况,本发明的目的是提供一种镍基单晶高温合金在不同温度下的静态弹性常数测量方法,只利用一种随机晶体取向的试样开展一次单轴拉伸试验即可获得该温度下单晶高温合金的全部三个弹性常数。
[0006]
本发明的技术方案如下:
[0007]
一种单晶高温合金的静态弹性常数测量方法,包括以下步骤:
[0008]
(1)通过定向凝固方法制备单晶高温合金毛坯;
[0009]
(2)切取板型拉伸试样及取样位置旁边具备相同取样方向的取向测量试样;
[0010]
(3)通过劳埃(laue)法、四圆衍射仪法或电子背散射衍射(ebsd)法测量出取向测量试样的晶体取向角;
[0011]
(4)在拉伸试验机上安装板型拉伸试样,并在试样表面布置散斑、光栅等变形追踪载体,对于高温试验,采用带有光学观察窗的高温炉进行加热,并采用具有耐热性的变形追踪载体;
[0012]
(5)通过非接触变形测量方法测量单晶高温合金在不同应力水平下的横纵应变及剪切应变;
[0013]
(6)静态弹性常数s
11
、s
12
和s
44
的计算公式如下:
[0014][0015]
其中:ψ、θ为表示单晶高温合金取向的欧拉角,σ为z向正应力,εz为z向正应变,εy为y向正应变,γ
yz
为y-z平面剪应变。
[0016]
其中步骤(2)中,试样的切取为随机方向,但若通过一次试验获得全部3个静态弹性常数,需保证切取的板型拉伸试样的取向满足欧拉角ψ、θ不少于15
°
,且cos2θ(sin2ψsin2θ+cos2θ)-cos2ψsin2θ(sin2ψsin2θ+cos2ψsin2θ)≠0。
[0017]
其中步骤(5)中,所述的非接触变形测量方法需要消除离面位移对测量结果产生的影响,包括三维数字图像相关(3d-dic)方法、基于远心镜头的二维数字图像相关(2d-dic)方法、云纹干涉(mi)法、电子散斑干涉(espi)法等。
[0018]
本发明提供的镍基单晶高温合金在不同温度下静态弹性常数的测量方法只利用一种随机晶体取向的试样,开展一次单轴拉伸试验即可获得该温度下单晶高温合金的全部三个弹性常数。
附图说明
[0019]
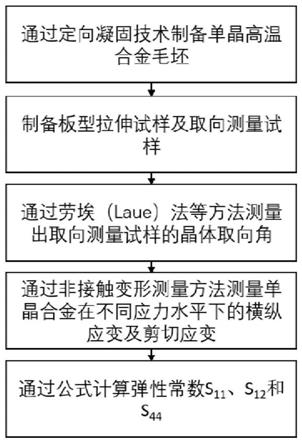
图1是本发明的单晶高温合金弹性常数测量方法流程图;
[0020]
图2是本发明的单晶高温合金弹性常数测量方法的试样坐标示意图;
[0021]
图3是本发明采用的欧拉转角表示取向示意图。
具体实施方式
[0022]
为了更清楚地理解本发明的目的、技术方案及优点,以下结合附图及实施例,对本发明进行进一步详细说明。
[0023]
本发明提供一种单晶高温合金的静态弹性常数测量方法,图1是本发明的单晶高温合金弹性常数测量方法流程图。如图1所示,本发明的方法包括步骤如下:
[0024]
s1:单晶高温合金毛坯制作
[0025]
利用螺旋选晶法或籽晶法选出合适的晶粒,利用定向凝固技术制备单晶高温合金板型毛坯,毛坯总长度超过100mm,宽度大于20mm,厚度任意。毛坯中不存在二次取向和残余应力。
[0026]
s2:单晶试样制备
[0027]
下料在毛坯里切取出一件长条形毛坯,第一取向和第二取向尽量避开[001]、[010]和[100]三个方向。将长条形毛坯加工成平板拉伸试样,在拉伸试样旁边切取具备相同取样方向的取向测量试样用于取向测量。
[0028]
s3:试样取向测量
[0029]
设试样的轴向为z向,垂直于试样平面的方向为x向,如图2所示。通过劳埃(laue)
法、四圆衍射仪法或电子背散射衍射(ebsd)法测量出取向测量试样的晶体取向,通过软件换算出试样坐标系与晶体取向的3个欧拉角φ、θ、ψ,如图3所示。
[0030]
s4:弹性常数测量试验准备
[0031]
s41:选择合适的非接触变形测量方法,需要能够测量平面内横纵应变和剪应变,并能够消除离面位移对测量结果产生的影响,包括三维数字图像相关(3d-dic)方法以及基于远心镜头的二维数字图像相关(2d-dic)方法、密栅云纹干涉(mi)法、电子散斑干涉(espi)法等。
[0032]
s42:在平板拉伸试验表面制备散斑追踪载体,如dic方法中的散斑,mi方法中的光栅,espi方法中的显影剂。
[0033]
s43:单轴拉伸试验中载荷的施加采用拉伸试验机。试验前,在拉伸试验机上安装板型拉伸试样,用销钉或夹持等方式连接。
[0034]
s44:如果试验条件为高温,则需采用相应的高温试验方法:加热采用带有光学观察窗的高温炉,变形追踪载体具备足够的耐热性,采用冷光照明,并在镜头表面安装暖色光滤光装置,通过观察窗可以清晰地采集试样y-z平面及表面的追踪载体。
[0035]
s5:弹性常数测量试验
[0036]
通过拉伸试验机对试验进行加载,施加的名义应力为σ,利用非接触变形测量设备测量y-z平面内的应变,包括纵向应变εz、横向应变εy和剪应变γ
yz
。
[0037]
s6:弹性常数计算
[0038]
利用3个欧拉角来描述单晶高温合金的取向。第一个转动为围绕z轴旋转φ角,对应变换矩阵为[az];第二个转动为围绕x轴旋转θ角,对应变换矩阵为[a
x
];第一个转动为围绕z轴旋转ψ角,对应变换矩阵为[a
z’]。[a]为三次旋转后的变换矩阵。
[0039][0040][0041][0042][0043]
对试样施加大小为的轴向应力σ,经过坐标变换可以得到1
×
6的应力向量[σ]。
[0044][0045]
单晶高温合金的柔度矩阵为[s],刚度矩阵为[c],各有3个独立的变量。二者互为逆矩阵。
[0046][0047]
[ε]=[s][σ]
[0048][0049]
若上述三个方程独立,则可通过求解方程组求得三个柔度常数s
11
,s
12
,s
44
。
[0050][0051]
通过柔度常数也可获得材料的刚度常数,计算公式如下:c
11
=1/s
11
,c
12
=-s
12
/s
11
,c
44
=1/s
44
。
[0052]
通过计算公式可以看出,若使方程独立需保证切取试样的取向满足欧拉角ψ、θ不少于15
°
,且cos2θ(sin2ψsin2θ+cos2θ)-cos2ψsin2θ(sin2ψsin2θ+cos2ψsin2θ)≠0。满足上述条件才能保证通过1根试样即可求出全部3个弹性常数。
[0053]
实施例
[0054]
采用第二代镍基单晶合金dd6作为试验材料。采用定向凝固技术和螺旋选晶法制备单晶合金试板,长度130mm,宽度40mm,厚度12mm。
[0055]
在毛坯里下料切取出一件长条形毛坯,并加工成平板拉伸试样和大小为5mm
×
5mm
×
2mm的取向测量试样。用劳埃法测量单晶合金的取向,通过换算获得欧拉角φ=26.7
°
,θ=35.8
°
,ψ=35.6
°
,满足单根试样测量全部弹性常数的要求。
[0056]
采用氧化铝粉末和酒精组成的高温散斑漆,用喷枪随机地喷在拉伸试样表面,经过固化形成散斑大小合适、密度均匀的高温散斑。
[0057]
将拉伸试样通过销钉装夹在万能电子试验机上,采用带观察窗的高温炉对试样进行加热,升高到制定温度并保温20min。采用横梁位移速度为0.5mm/min进行加载,利用采用双远心镜头的二维dic系统记录拉伸过程中试样变形后的图片,采集速率20帧/s,在材料弹性状态下进行加载,接近材料屈服强度的2/3时停止加载并卸载。
[0058]
通过dic软件计算拉伸过程中试样面内的应变,利用信号同步装置获得每个图像状态中承受的载荷,形成数组矩阵{σi;ε
zi
;ε
yi
;γ
yzi
},通过上述公式(1)采用多维线性拟合获得材料在该温度下的静态弹性常数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1