一种水务系统设备故障的事件触发异步检测方法
1.本发明属于自动控制领域,尤其涉及一种水务系统设备故障的事件触发异步检测方法。
背景技术:
2.随着近几年智慧城市的不断发展,每个城市对于水资源的供给管理也越发受到重视,水务系统成为各大城市管理中不可或缺的一部分。水是人们日常生活中所赖以生存的物质源泉,在生活质量不断提高的今天,人们对水的需求量日益增加,城市供水时常出现供水不稳定,甚至由于设备故障等问题出现断水的现象。因此,需要及时检测出城市水务系统设备的故障,避免由于设备问题造成供水系统不能正常工作的供水事故。城市水务的供水系统主要由水源、泵站、供水箱、供水网管、水管阀门以及水部门等组成,其中,在城市供水系统起重要作用的是泵站、水管阀门以及供水管网。在大多城市中,水务管网和水管阀门是埋藏在地下,这就使得其不易监测、维修困难。从而,水务管网和水管阀门在长时间工作中出现的诸多问题无法得到及时的监测与处理,从而造成城市供水系统的不安全,甚至出现局部区域断水的问题,这严重影响人们的日常生活。
3.在实际的水务系统网络中,工程人员都尽可能的希望系统模型越精确越好,这样才能够真实反映系统的本质特征。因此,如何精确建模是处理水务系统故障的首要问题。水管中水的流速,水管壁的压强以及水箱的水位等,这些均为非负值状态。如果用一般系统建模很容易造成建模不精确,在不精确建模情况下提出的故障解决方法自然不能在实际系统中起到有效作用。考虑到正系统在建模非负变量系统中的优越性,用正系统建模水务系统更为合理。由于水管中水的流速受诸多因素的影响总是波动的、具有随机性,在系统故障时,流速容易发生突变。因此采用半马尔科夫跳变过程来描述流速等变量的突变现象。
4.通常情况下,由于技术、设计代价等原因,元器件都存在容量不足、功能有限的问题。这些会带来一些应用壁垒。例如,在控制系统中,人们期望控制器的切换和系统的切换是同步的,实际上由于传感器在测量系统切换时需要一定时间,最终导致控制器和系统的切换是异步的;在滤波器系统中,滤波器和相应的系统切换也因为传感器的低效能造成异步现象。应用中的另一个问题是采样,为保证系统性能,周期采样被经常使用。然而,由于资源有效,如,网络的带宽、元器件的低功效等,周期采样不容易被实现。当网络处于拥堵状态时,仍然向网络通道投放数据包的做法只会使网络拥塞更加严重;当管网已经处于饱和状态时,继续增加泵站的泵水量,爆管更易发生。此外,周期采样容易造成资源浪费和高设计代价。特别是在系统性能已经达到预期的情况下,系统信号可以不更新。
技术实现要素:
5.本发明目的在于提供一种针对水务系统设备故障的事件触发异步检测方法,以解决现有的水务系统供水不稳定容易断水的技术问题。
6.为解决上述技术问题,本发明的一种针对水务系统设备故障的事件触发异步检测
方法的具体技术方案如下:
7.一种水务系统设备故障的事件触发异步检测方法,包括如下步骤:
8.步骤1、建立水务系统的状态空间模型;
9.步骤2、建立水务系统的事件触发条件;
10.步骤3、建立加权故障模型;
11.步骤4、建立事件触发异步滤波器模型;
12.步骤5、构造水务系统的故障检测模型;
13.步骤6、引入阈值报警故障检测机制;
14.步骤7、设计水务系统的事件触发故障检测滤波器。
15.进一步地,步骤1的水务系统的状态空间模型如下:
[0016][0017][0018]
其中x(t)∈rn表示供水网管的工作状态,u(t)∈rq表示单位时间内供水网管中水的流量,q表示供水网管的数量,y(t)∈r
p
为系统输出,p表示y(t)的维数,表示外部环境对供水网管中水流量的扰动,m表示供水网管的数量,表示供水网管中待检测的控制器故障信号,q表示被控制设备的数量,ga(x(t))=(g
a1
(x1(t)),g
a2
(x2(t)),
…
,g
an
(xn(t)))
t
表示系统的非线性,gb(
·
)是一个类似于ga(
·
)的非线性函数;r
t
表示一个半马尔科夫跳变过程,在一个有限集内取值;令r
t
=i,i∈s,则ai,bi,ci,di,ei,fi表示系统的系数矩阵,其中,ai是一个metzler矩阵,其他都是已知的具有适当维数的非负常数矩阵;表示故障的模态,在q={1,2,
…
,l}中取值,其中表示总故障个数;定义为其中的对角元素不是1就是0,若则表示没有故障,
[0019]
进一步地,步骤2的构造形式如下:
[0020]
t
ι+1
d=t
ι
d+min{t-t
ι
d||m(t)||1>β(t)||y(t)||1},
[0021]
其中,是已知的常数,t
ι
表示第ι个事件触发时刻,m(t)表示测量供水管道水流量的误差,其中表示自然数,它表示时刻t
l
供水管中水的流量,β(t)满足如下自适应律:
[0022][0023]
其中β0,都是给定的常数。
[0024]
进一步地,步骤3的结构形式如下:
[0025][0026]fw
(t)=cwga(xw(t))+dwf(t),
[0027]
其中,xw(t)∈rn是加权状态向量,是加权故障信号,aw,bw,cw,dw是具有合
适维度的已知系数矩阵。
[0028]
进一步地,步骤4的结构形式如下:
[0029][0030][0031]
其中,xf(t)∈rn表示滤波器的状态信号,rf(t)∈rq表示残差信号,表示滤波器输入,δ
t
表示一个半马尔科夫跳变过程,在一个有限集内取值;令δ
t
=l,l∈s,a
fl
,b
fl
,c
fl
,d
fl
,e
fl
是要设计的滤波器矩阵;
[0032]
系统模式r
t
与滤波器模式δ
t
之间的关系用如下概率表示:
[0033]
pr{δ
t
=l|r
t
=i}=θ
il
,
[0034]
对任意
[0035]
进一步地,步骤5的故障检测模型如下:
[0036][0037][0038]
其中e(t)=rf(t)-fw(t)
[0039][0040][0041][0042]
进一步地,步骤6引入阈值报警故障检测机制如下所示:
[0043][0044]
其中,t表示评估时间,jr(t)表示残差评估函数,根据残差评估函数,其阈值定义为:
[0045][0046]
当j(t)≤j
th
时,说明未发生故障,系统运行正常,当j(t)>j
th
时,说明发生故障,并产生报警。
[0047]
进一步地,步骤7包括如下具体步骤:
[0048]
步骤7.1:设计的事件触发故障检测滤波器系统矩阵如下:
[0049][0050][0051][0052]
其中,rn向量rq向量ξ
νl
>0,ρ
νl
>0,μ,v是设计滤波器的中间变量,1n表示元素全为1的n维向量,表示第μ个元素为1,其余元素为0的n维向量,1q表示元素全为1的q维向量,表示第ν个元素为1,其余元素为0的q维向量;
[0053]
步骤7.2:设计常数向量r
p
向量η
l
>0,η
μl
>0,ξ
νl
>0使得:
[0054][0055][0056][0057][0058][0059][0060][0061][0062][0063][0064][0065]
δ
μl
<δ
l
,η
μl
<η
l
,α≥nσ,
[0066]
对于任意的ν=1,2,<,n,ν=1,2,<,q,在步骤2的事件触发条件下,使用步骤7.1设计的滤波器,使得步骤4所设计的水务系统故障检测系统是正且l1随机稳定的,其中
[0067]
步骤7.3:根据步骤2、步骤7.1和步骤7.2的条件,得到保证故障检测系统为正的条件:
[0068][0069][0070]
其中,
[0071][0072]cil
=(e
fl
z1c
i c
fl d
fl-cw),d
il
=(0 e
fl
z1di),
[0073]
步骤7.4:考虑外部各种不确定因素对水务系统的影响,考虑如下约束性能:
[0074][0075]
步骤7.5:根据步骤2、步骤7.1得到保证故障检测系统随机稳定的条件:
[0076][0077][0078]
其中,
[0079][0080][0081]
步骤7.6:设计随机李亚普诺夫函数其中其弱无穷小算子为:
[0082][0083]
根据步骤7.2中的条件,可以得到:
[0084][0085]
根据步骤7.6说明故障检测系统在设计的事件触发滤波器下是l1随机稳定的。
[0086]
本发明的一种针对水务系统设备故障的事件触发异步检测方法具有以下优点:本发明基于正半马尔可夫跳变系统的事件触发策略以及异步检测的方法,针对城市水务系统的供水管道中水的流量进行数据采集,提出了一种水务系统设备故障的事件触发异步检测方法,该方法可以有效的对输送设备进行故障检测,从而有效处理城市供水系统中供水不稳定以及断水等一系列问题。利用正马尔科夫跳变系统对系统建模,建立了系统的状态空间模型,也能很好的处理由于外部环境而造成的随机性干扰问题。通过设计系统的李雅普
诺夫函数来设计事件触发滤波器,以保证故障检测系统是l1稳定的。
附图说明
[0087]
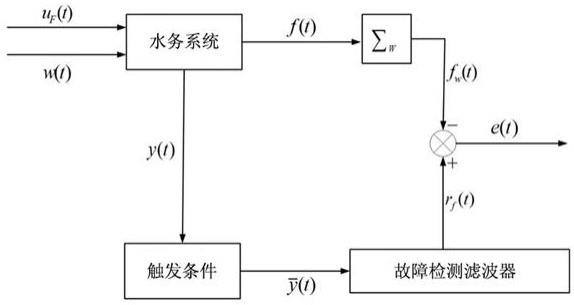
图1为本发明的供水网络系统框架示意图;
[0088]
图2为本发明的供水网络系统故障检测方法流程图。
具体实施方式
[0089]
为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明一种针对水务系统设备故障的事件触发异步检测方法做进一步详细的描述。
[0090]
本发明基于正半马尔科夫跳变系统模型、自适应事件触发策略、异步检测策略和基于滤波器的故障检测方法,对供水管中水的流速进行数据采集,提出了一种城市水务系统设备的故障检测方法,此方法可以对城市水务控制供水的设备进行实时有效的故障检测,从而有效改善供水不稳定以及断水的问题。
[0091]
如图1所示,以水务供水系统为研究对象,以供水网管中水流量为控制输入,以控制设备检测信号为输出,来建立水务供水系统的动态模型。具体步骤如下:
[0092]
步骤1、建立水务系统的状态空间模型,具体方法是:
[0093]
1.1对水务系统的输入输出数据进行采集以描述实际的系统:
[0094]
考虑水务系统的供水网络,供水网络通常由水源、泵站、供水箱、供水网管、水管阀门以及水部门等组成,图1展示了这些元素之间的联系。图1中展现了供水系统的大致流程,黑色箭头表示供水管道,水源经过泵站输送至水箱,在经过阀门输送到分配装置,分配设备开始将水按需求分配给不同的地方,每个需求地中的水箱按照要求对其进行供水。在供水过程中存在各种不确定因素导致供水不稳定甚至断水的情况,这时就需要及时发现供水设备的故障并及时维修处理。图2中展示的是供水网络系统的故障检测流程,考虑供水网管中水流量具有随机性并且为非负的,因此采用正半马尔科夫跳变系统进行水务系统的建模,并对其进行故障检测,防止供水过程中出现的供水不稳定以及断水的情况。
[0095]
1.2构造水务系统的状态空间模型:
[0096][0097][0098]
其中x(t)∈rn表示供水网管的工作状态,u(t)∈rq表示单位时间内供水网管中水的流量,q表示供水网管的数量,y(t)∈r
p
为系统输出,p表示y(t)的维数,表示外部环境对供水网管中水流量的扰动,m表示供水网管的数量,表示供水网管中待检测的控制器故障信号,q表示被控制设备的数量,ga(x(t))=(g
a1
(x1(t)),g
a2
(x2(t)),
…
,g
an
(xn(t)))
t
表示系统的非线性,gb(
·
)是一个类似于ga(
·
)的非线性函数。r
t
表示一个半马尔科夫跳变过程,在一个有限集内取值。为方便起见,令r
t
=i,i∈s,则ai,bi,ci,di,ei,fi表示系统的系数矩阵,其中,ai是一个metzler矩阵,其他都是已知的具有适当维数的非负常数矩阵。表示故障的模态,在q={1,2,,l}中取值,其中表示总故障个数。定义为其中的对角元素不是1就是0,若则表示没
有故障,
[0099]
步骤2、建立水务系统的事件触发条件,其构造形式如下:
[0100]
t
ι+1
d=t
ι
d+min{t-t
ι
d||m(t)||1>β(t)||y(t)||1},
[0101]
其中,是已知的常数,t
ι
表示第ι个事件触发时刻,m(t)表示测量供水管道水流量的误差,其中表示自然数,它表示时刻t
l
供水管中水的流量,β(t)满足如下自适应律:
[0102][0103]
其中β0,都是给定的常数。
[0104]
步骤3、建立加权故障模型,其结构形式如下:
[0105][0106]fw
(t)=cwga(xw(t))+dwf(t),
[0107]
其中,xw(t)∈rn是加权状态向量,是加权故障信号,aw,bw,cw,dw是具有合适维度的已知系数矩阵。
[0108]
步骤4、建立事件触发异步滤波器模型,其结构形式如下:
[0109][0110][0111]
其中,xf(t)∈rn表示滤波器的状态信号,rf(t)∈rq表示残差信号,表示滤波器输入,δ
t
表示一个半马尔科夫跳变过程,在一个有限集内取值。为方便起见,令δ
t
=l,l∈s,a
fl
,b
fl
,c
fl
,d
fl
,e
fl
是要设计的滤波器矩阵。
[0112]
此外,系统模式r
t
与滤波器模式δ
t
之间的关系可以用如下概率表示:
[0113]
pr{δ
t
=l|r
t
=i}=θ
il
,
[0114]
对任意i∈s,
[0115]
步骤5、构造水务系统的故障检测模型:
[0116][0117][0118]
其中e(t)=rf(t)-fw(t)
[0119][0120]
[0121][0122]
步骤6、引入阈值报警故障检测机制:
[0123][0124]
其中,t表示评估时间,jr(t)表示残差评估函数,根据残差评估函数,其阈值定义为:
[0125][0126]
当j(t)≤j
th
时,说明未发生故障,系统运行正常,当j(t)>j
th
时,说明发生故障,并产生报警。
[0127]
步骤7、设计水务系统的事件触发故障检测滤波器:
[0128]
7.1设计的事件触发故障检测滤波器系统矩阵如下:
[0129][0130][0131][0132]
其中,rn向量rq向量ξ
νl
>0,ρ
νl
>0,μ,v是设计滤波器的中间变量,1n表示元素全为1的n维向量,表示第μ个元素为1,其余元素为0的n维向量,1q表示元素全为1的q维向量,表示第ν个元素为1,其余元素为0的q维向量。
[0133]
7.2设计常数rn向量r
p
向量η
l
>0,η
μl
>0,ξ
νl
>0使得:
[0134][0135][0136][0137][0138][0139]
[0140][0141][0142][0143][0144][0145]
δ
μl
<δ
l
,η
μl
<η
l
,α≥nσ,
[0146]
对于任意的ν=1,2,
…
,n,ν=1,2,
…
,q,在步骤2的事件触发条件下,使用步骤7.1设计的滤波器,使得步骤4所设计的水务系统故障检测系统是正且l1随机稳定的,其中
[0147]
7.3根据步骤2、步骤7.1和步骤7.2的条件,得到保证故障检测系统为正的条件:
[0148][0149][0150]
其中,
[0151][0152]cil
=(e
fl
z1c
i c
fl d
fl-cw),d
il
=(0 e
fl
z1di),
[0153]
7.4考虑外部各种不确定因素对水务系统的影响,考虑如下约束性能:
[0154][0155]
7.5根据步骤2、步骤7.1得到保证故障检测系统随机稳定的条件:
[0156][0157][0158]
其中,
[0159][0160][0161]
7.6设计随机李亚普诺夫函数其中其弱无穷小算子为:
[0162][0163]
根据步骤7.2中的条件,可以得到:
[0164][0165]
根据步骤7.6说明故障检测系统在设计的事件触发滤波器下是l1随机稳定的。
[0166]
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本技术的权利要求范围内的实施例都属于本发明所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1