一种十字交叉结构的挠性件及应变天平的制作方法
1.本发明涉及应用于六分量测力平台的一种十字交叉结构的挠性件,属于多分量测试领域。
背景技术:
2.测量机械及风洞中的力时以及航空发动机矢量测量中,很多场合需要采用多分量力的测量,多分量的测量可以采用多分量传感器来测量,也可以通过由多个单分量传感器组成多分量测力天平的方式实现多分量的测量。应变天平发展到目前的阶段,其技术已经基本成熟并具有以下特点:
3.1)质量较轻,相应速度较快,并且信号容易传输,利于风洞试验自动化测量;
4.2)体积较小,可以放置在模型内部,不仅可以测量作用在全模型上的气动力和力矩,而且可以测量作用在模型部件或者外挂物上的气动力和力矩。
5.3)设计、加工简单,成本较低,可以根据不同的试验对象设计专用的应变天平
6.4)一般用于模型的静态试验,也可应用于模型的动态试验。
7.应变天平在从低速到高超速范围的各类型风洞中都得到了广泛的应用,而天平的性能指标直接影响试验数据的准确性,应变天平是通过多个单分量传感器的组合来实现最多三个方向力和三个方向扭矩的测量,因此最理想的测量方式是天平对各自所欲测量分量的载荷敏感,产生相对明显的变形,而对其它分量的载荷不明显,不产生或产生尽量小的变形,即对应用于测量某分力的电路输出值取决于该分力的大小,其余分力对它不影响或影响很小。实现结构上对力和力矩的机械分解和部分分解。
技术实现要素:
8.为了解决自解耦性能差的应变天平测量问题,本发明的主要目的是提供一种十字交叉结构的挠性件,并提供一种基于十字交叉结构的挠性件的应变天平,挠性件采用上下对称的十字交叉结构,在保证挠性件具有足够刚度的前提下提升挠性件弹性,实现应变天平的自解耦功能,减小应变天平的各个分力和各个扭矩之间的耦合,显著提高应变天平的测量准确度。本发明具有良好的弹性,加工容易,能够使应变天平具有良好的线性、重复性和滞后,而且耦合误差小,蠕变小。
9.本发明的目的是通过下述技术方案实现的。
10.本发明公开的一种十字交叉结构的挠性件,应用于应变天平,所述应变天平由多只单分量传感器组成,每只单分量传感器分别通过挠性件和天平上下连接板相连。所以挠性件是应变式天平实现自解耦功能的关键核心部件,因此挠性件对整个天平的技术性能指标提升,尤其是减小天平的耦合起着至关重要的作用。
11.本发明公开的一种十字交叉结构的挠性件,主要由定位台阶、连接法兰、相互垂直的十字交叉梁和过渡圆柱组成。
12.所述十字交叉梁由至少一组相互垂直的板组成。所述相互垂直的板的方向与两个
相互垂直的力方向一致。所述板的厚度在在保证称重的前提下,越薄解耦效果越好。通过上下对称的十字交叉梁,在保证挠性件具有足够刚度的前提下提升挠性件弹性,实现应变天平的自解耦功能,减小应变天平的各个分力和各个扭矩之间的耦合,显著提高应变天平的测量准确度。
13.因为主要是通过十字交叉梁解耦,所述过渡圆柱不影响解耦功能,便于过渡圆柱通过增大直径增加韧性和刚性,解决为解耦而导致过渡圆柱直径较小,容易断的问题。
14.作为优选,所述十字交叉梁由两边各一组相互垂直且上下对称的板组成。
15.作为优选,为了保证挠性件具有良好的弹性,减小天平的耦合,十字交叉部分横截面积尽可能的薄,但同时由于挠性件一端和各个单分量传感器连接,另一端和天平上板或者固定端连接,因此挠性件最小的横截面既要能够保证挠性件的弹性,又要能够承受和对应的单分量传感器的量程相匹配的载荷力的大小。通过改变挠性件最小的横截面改变量程的大小。
16.作为优选,所述十字交叉结构的挠性件的材料选择弹性合金钢40cr,热处理达到hrc35~40。
17.本发明公开的一种基于十字交叉结构的挠性件的应变天平,由多只单分量传感器组成,每只单分量传感器分别通过挠性件和天平上下连接板相连。所述挠性件为所述一种十字交叉结构的挠性件组成的测力天平。通过上下对称的十字交叉梁,在保证挠性件具有足够刚度的前提下提升挠性件弹性,实现应变天平的自解耦功能,减小应变天平的各个分力和各个扭矩之间的耦合,显著提高应变天平的测量准确度。
18.作为优选,本发明公开的一种基于十字交叉结构的挠性件的应变天平,主要由第一传感器至第七传感器共七只单分量传感器,以及天平上板、天平下板共同组成。七只单分量传感器中,第一传感器、第二传感器、第五传感器和第七传感器分别通过十字交叉挠性件直接和天平的上下板连接,第三传感器、第四传感器和第六传感器分别通过十字交叉挠性件和连接件再与天平上板、天平下板连接,从而实现三个方向力和三个方向扭矩的测量。
19.有益效果:
20.1、本发明公开的一种十字交叉结构的挠性件及应变天平,挠性件采用相互垂直且上下对称的十字交叉结构,在保证挠性件具有足够刚度的前提下提升挠性件弹性,实现应变天平的自解耦功能,减小应变天平的各个分力和各个扭矩之间的耦合,显著提高应变天平的测量准确度。本发明具有良好的弹性,加工容易,能够使应变天平具有良好的线性、重复性和滞后,而且耦合误差小,蠕变小。
21.2、本发明公开的一种十字交叉结构的挠性件及应变天平,采用的是十字交叉对称结构的挠性件,十字交叉梁弹性部分的横截面积很小且上下对称,改变十字交叉部分的横截面积能够改变量程的大小,所述挠性件能够和不同量程的单分量传感器配合使用用于应变天平中,实现不同量程的应变天平对三个方向和三个方向扭矩的测量。
22.3、本发明公开的一种十字交叉结构的挠性件及应变天平,主要是通过十字交叉梁解耦,所述过渡圆柱不影响解耦功能,便于渡圆柱通过增大直径增加韧性和刚性,解决为解耦而导致过渡圆柱直径较小,容易断的问题,进而加工容易,可靠性好。
23.4、本发明公开的一种十字交叉结构的挠性件及应变天平,在保证挠性件具有足够刚度的前提下又具有良好的弹性,使得应变天平本身具有良好的自解耦性能,可以实现应
变天平对三个方向力和三个方向扭矩的准确测量,能够实现直升机旋翼噪声试验中精准测量作用在模型上的空气力的大小,方向和作用点,在风洞试验、航空发动机矢量推力、汽车轮胎的动态疲劳测试和评估等等矢量力测量领域提供更加全面可靠的技术支撑,使测量数据更加准确可靠。
附图说明
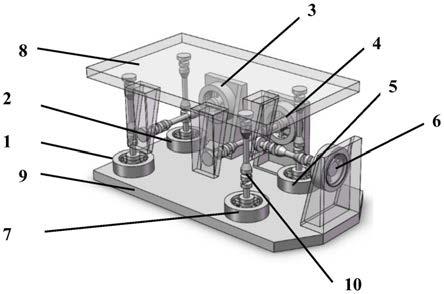
24.图1为实施例1的十字梁交叉结构的挠性件在应变天平中的三维结构示意图;
25.图2为实施例1的十字梁交叉结构的挠性件三维结构示意图。
26.其中,1—传感器、2—传感器、3—传感器、4—传感器、5—传感器、6—传感器、7—传感器、8—应变天平上板、9—应变天平下板、10—十字梁交叉结构的挠性件、11—定位台阶、12—连接法兰、13—十字交叉梁、14—过渡圆柱。
具体实施方式
27.下面结合附图与实施例对本发明作进一步说明。
28.实施例1
29.如图2所示,本实施例公开的一种十字交叉结构的挠性件,由定位台阶11,连接法兰12,相互垂直的十字交叉梁13和过渡圆柱14组成。所述十字交叉梁13由一组对称且相互垂直的板组成。所述相互垂直的板的方向两个相互垂直的力方向一致。所述板的厚度在在保证称重的前提下,越薄解耦效果越好。所述十字交叉结构的挠性件10的材料选择弹性合金钢40cr,热处理达到hrc35~40。
30.如图1所示,本实施例公开的一种基于十字交叉结构的挠性件的应变天平,主要由第一传感器1至第七传感器7共七只单分量传感器,以及天平上板8、天平下板9共同组成。七只单分量传感器中,第一传感器1、第二传感器2、第五传感器5和第七传感器7分别通过十字交叉挠性件直接和天平的上下板连接,第三传感器3、第四传感器4和第六传感器6分别通过十字交叉挠性件和连接件再与天平上板8、天平下板9连接,从而实现三个方向力和三个方向扭矩的测量。
31.本实施例公开的一种基于十字交叉结构的挠性件的应变天平,具体工作过程和设计方法如下:
32.通过十字交叉结构的挠性件组成的天平力值和扭矩计算方法如下:
33.1、轴向力力值fy由第一传感器1、第二传感器2、第五传感器5和第七传感器7四个传感器来测量:
34.fy=f1+f2+f5+f7
35.x方向力值fx由第三传感器3、第四传感器4两个传感器来测量
36.fx=f3+f4
37.z方向力值fz由第六传感器6来测量
38.fz=f6
39.主方向扭矩my由第三传感器3和第四传感器4来测量
40.my=f3
×
0.0825-f4
×
0.0825
41.弯矩mx由第一传感器1、第二传感器2、第五传感器5和第七传感器7来测量
42.mx=(f1+f7)
×
0.075-(f2+f5)
×
0.075
43.弯矩mz由第一传感器1、第二传感器2、第五传感器5和第七传感器7来测量
44.mz=(f1+f2)*0.145-(f5+f7)*0.145
45.2、各分量信号与各个传感器单分量输出灵敏度之间的关系
46.δny=b1+b2+b5+b7(mv/v)
47.δnx=b3+b4(mv/v)
48.δnz=b6(mv/v)
49.δnmy=b3-b4(mv/v)
50.δnmx=b1+b7-b2-b5(mv/v)
51.δnmz=b1+b2-b5-b7(mv/v)
52.3、天平公式
53.y(n)=2470.844δny
54.x(n)=843.554δnx
55.z(n)=848.752δnz
56.my(nm)=71.2129δnymy
57.mx(nm)=187.7088δnmx
58.mz(nm)=350.281δnmz
59.4、校准方法及数据
60.在此多分量力校准装置上对量程为fy=2400n,f
x
=490n,fz=220n,mx=180nm,my=60nm,mz=150nm的应变天平进行校准,计算各个方向力值和扭矩的技术指标以及应变天平各个力值分量
61.4.1天平各分量的总体校准结果
62.(1)正方向
63.分量y+(n)x+(n)z+(n)mx+(nm)my+(nm)mz+(nm)设计需求载荷240049022018060150校准载荷2500500500200100200灵敏度(mv/v)1.01180.591530.589460.570971.404241.06548重复性(%)fs0.070.050.020.020.060.05非线性(%)fs0.160.0020.040.10.0130.021
64.(2)负方向
65.分量y-(n)x-(n)z-(n)mx-(nm)my-(nm)mz-(nm)设计需求载荷240049022018060150校准载荷2500500500200100200灵敏度(mv/v)-1.0214-0.59273-0.5891-0.55702-1.40587-1.07905重复性(%)fs0.080.080.020.020.050.06非线性(%)fs0.150.020.040.050.040.014
66.4.2天平各分量之间的耦合
67.(1)正方向
[0068][0069]
(2)负方向
[0070][0071]
4.3 45度侧方向x方向加载对主方向力y方向的耦合
[0072][0073]
5.天平解耦公式:
[0074]
k矩阵计算公式:
[0075]
[f]=[s]*[k]
[0076]
其中f为六个标准力值的矩阵,s为传感器输出电压信号矩阵。
[0077]
f矩阵为
[0078]fy
(n)f
x
(n)fz(n)m
x
(nm)my(nm)mz(nm)2500000000500000000500000000200000000100000000200
[0079]
s矩阵
[0080][0081]
k矩阵
[0082]
2469.894-6.7669-2.8165-2.58379-0.97657-6.38437-6.85212845.37011.63564-2.177581.0128152.25362826.12294-1.17711848.0799-0.30957-2.66836-3.3769927.21544-7.457351.335227187.6950.110181-6.29912.24562-0.285481.115446-1.4365471.20373-1.8854620.347740.9379497.9987880.051042-0.13096350.1999
[0083]
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1