1.本发明涉及船舶排放检测领域,具体是指一种基于桥梁或船闸搭载的自动筛查船舶排放的系统及方法。
背景技术:2.近些年,国家高度重视大气污染防治工作,随着移动源污染防治攻坚行动实施,我国陆上移动源排放日趋下降,船舶污染排放日益受到重视,由于船舶排放法规和燃料质量标准落后于机动车,因此船舶排放控制的必要性和紧迫性日益凸显,船舶内燃机尾气排放物包括气态物和颗粒物两类,主要为二氧化碳(co2)、一氧化碳(co)、氮氧化物(nox)、二氧化硫(so2)、碳氢化合物(hc)和颗粒物(pm),对于船舶柴油机,nox、pm和so2是船舶尾气排放中的主要污染物。
3.公开号为cn108490138a的中国发明公开了一种根据微脉冲激光雷达观测数据判断船舶排放污染物是否超标的方法,包括以下步骤:一、在实验船上安装co2浓度观测仪、so2浓度观测仪、pm10测量仪;二,记录不同的实验船运行时由微脉冲激光雷达观测的数据及实验船上浓度观测仪观测的数据;三、将由微脉冲激光雷达观测的数据与实验船上的浓度观测仪观测的数据进行数据拟合;四、根据船舶污染气体排放的相关文件中对不同气体排放的临界值结合拟合函数。本装置仅适用于抽查,并且对于较为繁忙的河道/船闸,上述检测手段需要大量人力投入,效率较低,无法满足对船舶进行全自动实时高效筛查的要求。
技术实现要素:4.本发明的目的是克服现有技术中的不足之处,提供一种基于桥梁或船闸搭载的自动筛查船舶排放的系统及方法,能够非接触式全自动的对船舶排放气体污染物快速在线检测,高效可靠,具有良好的技术效果。
5.本发明的目的是通过以下技术方案来实现的:
6.一种基于桥梁或船闸搭载的自动筛查船舶排放的系统,包括:
7.动作捕捉相机,固定连接在桥梁或船闸上,用于捕捉经过船舶的图像;
8.气体传感器模块,用于检测排放烟羽的气体污染物浓度;
9.真空泵,用于吸入烟羽;
10.激光测距仪,用于测量船舶烟囱高度;
11.排放因子计算单元,包括计算模块和控制模块,所述计算模块和控制模块电连接,所述控制模块获取所述气体传感器模块检测的气体污染物浓度,所述计算模块根据所述气体污染物浓度计算得到排放因子,所述排放因子计算单元连接有服务器、动作捕捉相机、气体传感器模块、真空泵、激光测距仪和通讯模块;
12.通讯模块,用于传输船舶排放量、船舶烟囱高度和气体污染物浓度信息给服务器。
13.进一步的,所述计算模块计算所述排放因子大小,当排放因子超标时,所述控制模块将通过通讯模块自动发送相关警示信息给服务器。
14.进一步的,所述通讯模块为gsm、wifi或蓝牙通讯的一种或多种。
15.进一步的,所述气体传感器模块包括二氧化碳传感器和二氧化硫传感器,所述二氧化碳传感器和二氧化硫传感器为ndir传感器、热导池二氧化碳传感器、催化剂二氧化碳传感器、半导体二氧化碳传感器、电化学二氧化碳传感器的一种或多种。
16.一种基于桥梁或船闸搭载的自动筛查船舶排放的方法,包括如下步骤:
17.步骤一、船舶经过桥梁或船闸,通过运动捕捉相机在船舶靠近监测点时开启排放因子计算单元,采集船舶排放的气体污染物;
18.步骤二、船舶经过时通过真空泵吸入烟羽,通过激光测距仪测量船舶烟囱高度实时测量船舶烟羽的气体污染物浓度;
19.步骤三、排放因子计算单元的计算模块对采集到的所述气体污染物进行处理,并自动计算船舶的排放因子;
20.步骤四、控制模块判断船舶排放因子是否合格,当排放因子合格时,船舶正常通过桥梁或船闸,当排放因子不合格时,控制模块自动发送运动捕捉相机拍摄的船舶照片以及排放因子信息预警通知到服务器。
21.进一步的,所述步骤三还包括如下步骤:
22.步骤a、气体传感器模块实时测量排放烟羽的气体污染物浓度,并确定船舶靠近监测点之前的气体污染物浓度为背景浓度;
23.步骤b、根据实时测量的所述气体污染物浓度的变化趋势选取烟羽中心点的气体污染物浓度数据;
24.步骤c、根据所述烟羽中心点的气体污染物浓度和所述背景浓度,按照排放因子公式计算述烟羽中心点的排放因子。
25.进一步的,所述步骤c中排放因子公式为:
[0026][0027]
其中,ef为目标气体的排放因子;δ[pollu tan t]为烟羽中心点和背景环境中测得的目标气体浓度差;δ[co2]为烟羽中心点中和背景环境中测得的二氧化碳浓度差;mwc碳的分子量;为二氧化碳的分子量;wc为燃油的碳含量。
[0028]
本发明相比现有技术具有以下优点及有益效果:
[0029]
1、本发明通过动作捕捉相机对过往船舶进行图像捕捉,触发排放因子计算单元,所述气体传感器模块实时测量排放烟羽的气体污染物浓度,并根据所述气体污染物浓度计算并且判定船舶排放是否合格。本发明提供的一种基于桥梁或船闸搭载的自动筛查船舶排放的系统及方法实现了非接触式的船舶排放快速在线检测,高效可靠,具有良好的技术效果。
[0030]
2、本发明利用运动捕捉相机确认目标船舶,实现了船舶排放烟羽的全自动捕捉以及排放因子计算单元对排放因子的计算,并且实现了无人值守的全自动检测,大大提高了检测效率;另一方面,本发明利用安装在桥梁或船闸等位于航道上方的建筑结构的气体传感器模块实时测量行驶过程中的船舶排放烟羽的气体污染物浓度,无需操作人员登船,真正实现了非接触式的船舶排放快速在线检测,高效可靠。
附图说明
[0031]
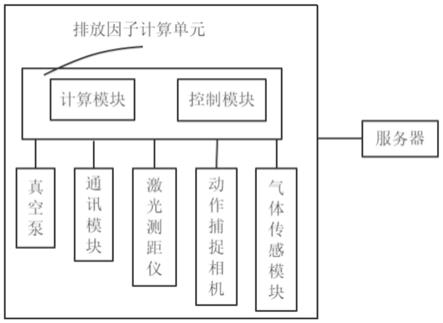
图1为一种基于桥梁或船闸搭载的自动筛查船舶排放的系统的原理模块图;
[0032]
图2为一种基于桥梁或船闸搭载的自动筛查船舶排放的系统及方法的流程图;
[0033]
图3为步骤三的具体步骤流程图;
[0034]
图4为一种基于桥梁或船闸搭载的自动筛查船舶排放的系统应用示意图;
[0035]
图5为气体传感器检测到气体浓度的变化图。
具体实施方式
[0036]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0037]
如图1和图4所示,一种基于桥梁或船闸搭载的自动筛查船舶排放的系统,包括:
[0038]
动作捕捉相机,固定连接在桥梁或船闸上,用于捕捉经过船舶的图像;
[0039]
气体传感器模块,用于检测排放烟羽的气体污染物浓度;
[0040]
真空泵,用于吸入烟羽;
[0041]
激光测距仪,用于测量船舶烟囱高度;
[0042]
排放因子计算单元,包括计算模块和控制模块,所述计算模块和控制模块电连接,所述控制模块获取所述气体传感器模块检测的气体污染物浓度,所述计算模块根据所述气体污染物浓度计算得到排放因子,所述排放因子计算单元连接有服务器、动作捕捉相机、气体传感器模块、真空泵、激光测距仪和通讯模块;
[0043]
通讯模块,用于传输船舶排放量、船舶烟囱高度和气体污染物浓度信息给服务器。
[0044]
本发明当有船舶经过时,所述动作捕捉相机对船舶进行图像捕捉,触发排放因子计算单元,所述真空泵将船舶排放的气体污染物吸入,通过激光测距仪和气体传感器模块实时测量排放烟羽的气体污染物浓度,并通过排放因子计算单元中的计算模块对气体污染物浓度计算,所述控制模块判定船舶排放因子是否合格。
[0045]
所述计算模块计算所述排放因子大小,当排放因子超标时,所述控制模块将通过通讯模块自动发送相关警示信息给服务器,无需人员值守,实现了全自动对船舶排放气体污染物快速在线检测。
[0046]
所述通讯模块为gsm、wifi或蓝牙通讯的一种或多种,用于将气体传感器模块检测的数据实时发送回服务器上,以完成数据的实时在线处理。
[0047]
所述气体传感器模块包括二氧化碳传感器和二氧化硫传感器,用于检测气体获取气体污染物浓度;所述二氧化碳传感器和二氧化硫传感器为ndir传感器、热导池二氧化碳传感器、催化剂二氧化碳传感器、半导体二氧化碳传感器、电化学二氧化碳传感器的一种或多种,所述气体传感器还可以包括根据需要额外增加的一氧化碳传感器、一氧化氮传感器和二氧化氮传感器中的一种或多种,具体可选用电化学传感器或其他工作原理的传感器。
[0048]
如图2所示,一种基于桥梁或船闸搭载的自动筛查船舶排放的方法,包括如下步骤:
[0049]
步骤一、船舶经过桥梁或船闸,通过运动捕捉相机在船舶靠近监测点时开启排放
因子计算单元,采集船舶排放的气体污染物;
[0050]
步骤二、船舶经过时通过真空泵吸入烟羽,通过激光测距仪测量船舶烟囱高度实时测量船舶烟羽的气体污染物浓度;
[0051]
步骤三、排放因子计算单元的计算模块对采集到的所述气体污染物进行处理,并自动计算船舶的排放因子;
[0052]
步骤四、控制模块判断船舶排放因子是否合格,当排放因子合格时,船舶正常通过桥梁或船闸,当排放因子不合格时,控制模块自动发送运动捕捉相机拍摄的船舶照片以及排放因子信息预警通知到服务器。
[0053]
如图3所示,所述步骤三还包括如下步骤:
[0054]
步骤a、气体传感器模块实时测量排放烟羽的气体污染物浓度,并确定船舶靠近监测点之前的气体污染物浓度为背景浓度;
[0055]
步骤b、根据实时测量的所述气体污染物浓度的变化趋势选取烟羽中心点的气体污染物浓度数据;
[0056]
步骤c、根据所述烟羽中心点的气体污染物浓度和所述背景浓度,按照排放因子公式计算述烟羽中心点的排放因子。
[0057]
本实施例中,所述排放因子公式是基于燃油碳平衡的原理,利用燃油中碳元素与二氧化碳的转化关系,再利用所述烟羽中心点的气体污染物浓度和所述背景浓度中的二氧化碳浓度差和目标气体浓度差计算得到,所述步骤c中排放因子公式为:
[0058][0059]
其中,ef为目标气体的排放因子;δ[pollu tan t]为烟羽中心点和背景环境中测得的目标气体浓度差;δ[co2]为烟羽中心点中和背景环境中测得的二氧化碳浓度差;mwc碳的分子量;为二氧化碳的分子量;wc为燃油的碳含量。
[0060]
如图5所示,当运动捕捉相机捕捉到船只靠近时,随着时间的增加,目标污染物浓度和二氧化碳浓度突增,船只通过桥梁或船闸后,目标污染物浓度和二氧化碳浓度突降,这显示了气体传感器模块的灵敏性,极大的提高的检测效率。
[0061]
需要说明的是,上述具体实施方式仅仅为本发明的较佳实施例及所运用技术原理,在本发明所公开的技术范围内,任何熟悉本技术领域的技术人员在未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都应涵盖在本发明的保护范围内。