编码器异常诊断装置的制作方法
编码器异常诊断装置
1.相关申请的交叉引用
2.本技术要求于2020年10月20日提交的日本专利申请号为2020-176309的优先权,该日本专利申请的全文(包括说明书、权利要求书、附图和摘要)通过引用结合于此。
技术领域
3.本发明书公开了编码器异常诊断装置,该编码器异常诊断装置配置成根据对象的旋转角度来诊断输出余弦波形和正弦波形的编码器中的异常。
背景技术:
4.针对机床主轴,国际标准要求有速度限制监视功能。例如,对于车床的主轴,iso 23125要求以安全类别3进行速度限制监视。
5.作为用于机床主轴的检测器,通常使用例如为磁性编码器的检测器,该磁性编码器根据旋转角度以n个周期每旋转输出正弦波形和余弦波形(下文中称为正弦/余弦信号输出编码器)。
6.例如在apfeld,r.的“安全驱动控制是否也需要安全位置编码器?(do safe drive controls also require safe position encoders?)”([线上]互联网url:http://www.dguv.de/medien/ifa/en/pub/rep/pdf/reports2013/ifar0713e/safe_drive_controls.pdf(非专利文献1))中公开了一种利用正弦/余弦信号输出编码器来实现以安全类别3进行速度监视的方法。在该非专利文献1中,公开了利用单个正弦/余弦信号输出编码器来执行的方法。在利用单个正弦/余弦信号输出编码器的情况下,对于编码器输出信号需要高诊断率。因此,必须基于sin2+cos2=1来诊断余弦波形和正弦波形,并且该非专利文献1公开了通过sin2+cos2=1的诊断可以实现≥99%的诊断率。
[0007]
图2是当利用单个正弦/余弦信号输出编码器以安全类别3来监视速度时的框图。在图2中,编码器1根据旋转角度θ输出包括余弦波形=a
·
cos(n
·
θ)和正弦波形=a
·
sin(n
·
θ)的正弦/余弦波形,其中,n表示编码器的每次旋转输出的正弦波形和余弦波形的频率。n由磁性编码器中齿轮的齿数或光学编码器中狭缝数来确定。电平转换电路2将余弦波形转换为可供后级电路使用的输出为vc的电压电平。脉冲化电路3将vc转换为脉冲信号。类似地,电平转换电路4将正弦波形转换为可供后级电路使用的输出为vs的电压电平,并且脉冲化电路5将vs转换为脉冲信号。由各个脉冲化电路3和5输出的脉冲信号是相位彼此偏移90
°
的脉冲信号,计数器6和8以已知的方法对乘以4的脉冲进行计数。速度监视单元7基于计数器6的计数值的变化量来计算编码器的旋转速度,并监视该速度。在速度超出速度限制的情况下,速度监视单元7向异常处理单元14输出异常信号。类似地,速度监视单元9基于计数器8的计数值的变化量来计算编码器的旋转速度,并监视该速度。在速度超出速度限制的情况下,速度监视单元9向异常处理单元14输出异常信号。速度监视单元7和9相互监视各个速度计算结果和各个速度监视结果,并且在速度监视单元7和9的计算结果之间产生差异的情况下,向异常处理单元14输出各个异常信号。ad转换器10和11分别对从电平转换电路2和4
输出的信号vc和信号vs执行ad转换,并将各个经ad转换的信号输出到利萨如(lissajous)半径计算处理单元12。利萨如半径计算处理单元12针对分别由ad转换器10和11输出的信号vc和信号vs的ad转换结果执行包括偏移校正、幅度比校正、相位校正等的各种校正,然后计算利萨如半径。在利萨如半径在预定参考范围以外的情况下,诊断处理单元13向异常处理单元14输出异常信号。在速度监视单元7和9中的任何一者的情况下,异常处理单元14执行诸如关闭向电机供能的异常处理,并且诊断处理单元13输出异常信号。
[0008]
在图3所例示的由利萨如半径计算处理单元12输出的利萨如半径22超出利萨如半径的上限阈值23或低于下限阈值24的情况下,诊断处理单元13将异常信号输出到异常处理单元14。在下文中,将由上限阈值23和下限阈值24定义的范围称为“参考范围”。
[0009]
由编码器输出的余弦波形和正弦波形的利萨如半径因各种因素而波动。在磁性编码器的情况下,这些波动因素的示例可以包括在连接状态下齿轮与编码器之间的间隙的波动、由于齿轮的偏心导致的编码器的旋转周期的波动、环境温度中的波动以及编码器的旋转频率的波动。因此,需要在反映这种波动量的同时设置用于诊断利萨如半径的阈值;否则,可能发生过度检测,例如,尽管是正常的而半径被错误地检测为异常的。
[0010]
然而,根据编码器的故障模式,将生成如图4所例示的利萨如波形21。在这种情况下,利萨如波形21在第一象限和第四象限之间往复,并且计数器重复向上和向下计数,由此即使对象在旋转时也将该对象确定为处于停止状态。此外,利萨如波形21总是在参考范围内,这使得不能检测到异常。毋庸置疑,可以通过缩小参考范围将图4所例示的利萨如波形21检测为异常的,但是缩小参考范围使得不可能接受由于上述温度波动等情况引起的利萨如半径的波动,由此发生过度检测。
[0011]
因此,本发明公开了能够更准确地检测编码器中的异常的编码器异常诊断装置。
技术实现要素:
[0012]
本发明公开的编码器异常诊断装置是被配置成根据对象的旋转角度对输出余弦波形和正弦波形的编码器中的异常进行诊断的编码器异常诊断装置,该编码器异常诊断装置包括:停止确定处理单元,其配置成基于脉冲信号的计数值中的变化来确定所述对象正在旋转还是正在停止,其中所述脉冲信号是通过对所述余弦波形和所述正弦波形中的每一者进行脉冲化来获得的;频率测量单元,其配置成测量所述脉冲信号的频率;和频率诊断单元,其配置成当所述停止确定处理单元确定所述对象正在停止时,将由所述频率测量单元测量的频率与预设上限频率进行比较,以及当所测量的频率超出所述上限频率时,确定所述编码器中发生了异常。
[0013]
在这种情况下,所述上限频率可以是基于所述对象的控制周期来确定的。
[0014]
所述上限频率可以是基于所述对象的最大加速度和用于所述脉冲化的滞回宽度来确定的。
[0015]
根据本发明中公开的编码器异常诊断装置,当确定对象正在停止时,也可以基于脉冲信号的频率来检查存在或不存在旋转,由此可以更准确地检测编码器中的异常。
附图说明
[0016]
将基于以下附图来描述本公开的一个或多个实施例,其中:
[0017]
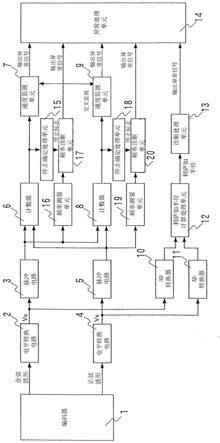
图1是例示了编码器异常诊断装置的配置的框图;
[0018]
图2是例示了传统的编码器异常诊断装置的配置的框图;
[0019]
图3是例示了当编码器正常时的利萨如波形的示例的视图;
[0020]
图4是例示了当编码器中发生异常时的利萨如波形的示例的视图;
[0021]
图5是例示了停止确定处理的流程的流程图;
[0022]
图6是例示了振荡状态下的利萨如波形的示例的视图;以及
[0023]
图7是例示了脉冲化电路的操作的曲线图。
[0024]
附图标记列表
[0025]
1 编码器
[0026]
2、4 电平转换电路
[0027]
3、5 脉冲化电路
[0028]
6、8 计数器
[0029]
7、9 速度监视单元
[0030]
10、11 ad转换器
[0031]
12 利萨如半径计算处理单元
[0032]
13 诊断处理单元
[0033]
14 异常处理单元
[0034]
15、18 停止确定处理单元
[0035]
16、19 频率测量单元
[0036]
17、20 频率诊断单元
[0037]
21 利萨如波形
[0038]
22 利萨如半径
[0039]
23 上限阈值
[0040]
24 下限阈值
[0041]
25 脉冲化电路输入信号
[0042]
26 滞回宽度
[0043]
27 脉冲信号
具体实施方式
[0044]
将通过参照图1、图5、图6和图7来描述编码器异常诊断装置的配置。图1是编码器异常诊断装置的框图。编码器1根据旋转角度θ输出包括余弦波形=a
·
cos(n
·
θ)和正弦波形=a
·
θsin(n
·
θ)的正弦/余弦信号,其中,n表示编码器的每次旋转输出的正弦波形和余弦波形的频率。n由磁性编码器中齿轮的齿数或光学编码器中狭缝数来确定。电平转换电路2将余弦波形转换为可供后级电路使用的输出为vc的电压电平。脉冲化电路3将vc转换为脉冲信号。类似地,电平转换电路4将正弦波形转换为可供后级电路使用的输出为vs的电压电平,并且脉冲化电路5将vs转换为脉冲信号。由各个脉冲化电路3和5输出的脉冲信号是相位彼此偏移90
°
的脉冲信号,计数器6和8以已知的方法对乘以4的脉冲进行计数。速度监视单元7基于计数器6的计数值的变化量来计算编码器的旋转速度,并监视该速度。在速度超出速度限制的情况下,速度监视单元7向异常处理单元14输出异常信号。类似地,速度监视单
元9基于计数器8的计数值的变化量来计算编码器的旋转速度,并监视该速度。在速度超出速度限制的情况下,速度监视单元9向异常处理单元14输出异常信号。速度监视单元7和9相互监视各个速度计算结果和各个速度监视结果,并且在速度监视单元7和9的计算结果之间产生差异的情况下向异常处理单元14输出异常信号。
[0045]
ad转换器10和11分别对从电平转换电路2和4输出的信号vc和信号vs执行ad转换,并将各个经ad转换的信号输出到利萨如半径计算处理单元12。利萨如半径计算处理单元12针对分别由ad转换器10和11输出的信号vc和信号vs的ad转换结果执行包括偏移校正、幅度比校正、相位校正等的各种校正,然后计算利萨如半径。在利萨如半径在预定参考范围以外的情况下,诊断处理单元13向异常处理单元14输出异常信号。
[0046]
停止确定处理单元15基于从计数器6输出的计数值来确定对象是旋转还是停止。停止确定处理单元15在确定对象是停止时向频率诊断单元17输出处于激活状态的停止标志,并且在确定对象是旋转时向频率诊断单元17输出处于关闭状态的停止标志。频率测量单元16测量由脉冲化电路3输出的脉冲信号的频率,并且将所测量的频率输出到频率诊断单元17。在由停止确定处理单元15输出的停止标志处于激活状态时频率诊断单元17将由频率测量单元16输出的脉冲信号的频率与上限频率进行比较,并且在脉冲信号的频率超出上限频率的情况下向异常处理单元14输出异常信号。
[0047]
类似地,停止确定处理单元18基于从计数器8输出的计数值来确定对象正在旋转还是正在停止。停止确定处理单元18在确定对象正在停止时向频率诊断单元20输出处于激活状态的停止标志,并且在确定对象正在旋转时向频率诊断单元20输出处于关闭状态的停止标志。频率测量单元19测量由脉冲化电路5输出的脉冲信号的频率,并且将所测量的频率输出到频率诊断单元20。在由停止确定处理单元18输出的停止标志处于激活状态时频率诊断单元20将由频率测量单元19输出的脉冲信号的频率与上限频率进行比较,并且在脉冲信号的频率超出上限频率的情况下向异常处理单元14输出异常信号。
[0048]
在速度监视单元7和9、诊断处理单元13以及频率诊断单元17和20中的任何一者输出异常信号的情况下,异常处理单元14执行诸如关断向电机供能的异常处理。
[0049]
图5是例示了将由停止确定处理单元15执行的处理流的流程图。停止确定处理单元15输入从计数器6输出的计数值,并且将由当前计数值减去先前计数值所获得的值计算为计数差值(s10)。当计数差值的绝对值等于或大于2时(在s12中为“否”),停止确定处理单元15确定物体正在旋转,并关闭停止标志(s14)。另一方面,当计数差值的绝对值小于2时(在s12中为“是”),停止确定处理单元15前进到步骤s16。
[0050]
在步骤s16中,停止确定处理单元15检查停止标志的当前状态。作为检查的结果,当停止标志是关闭时(在s16中为“否”),停止确定处理单元15将当前计数值设置为计数停止值的值(s18),并前进到步骤s20。计数停止值是当停止标志从关闭切换到激活时的计数值。另一方面,当停止标志激活时(在s16中为“是”),停止确定处理单元15在不重新设置计数停止值的情况下直接前进到步骤s20。
[0051]
在步骤s20中,停止确定处理单元15通过将从当前计数值减去计数停止值而获得的值计算为计数累积变化值。然后,当计数累积变化值的绝对值等于或大于2时(在s22中为“否”),停止确定处理单元15确定物体正在旋转,并且关闭停止标志(s14)。另一方面,当计数累积变化值的绝对值小于2时(在s22中为“是”),停止确定处理单元15确定对象正在停
止,并激活停止标志(s24)。当在步骤s14或步骤s24中设置了停止标志时,停止确定处理单元15将当前计数值记录为先前计数值(s26),并返回到步骤s10。此后,每次输出计数值时重复类似的处理过程。
[0052]
如前面所清楚描述的,在该示例中,对象是否正在旋转是基于计数差值的绝对值来确定的。因此,在由于编码器的故障所生成的如图4所例示的利萨如波形21的情况下,计数器重复向上和向下计数。结果是,停止确定处理单元15即使在对象旋转时也确定该对象正在停止,并且激活停止标志。相同的情况也适用于将由停止确定处理单元18执行的确定处理。
[0053]
如上面所述的,停止确定处理单元15、18的确定结果被输入到频率诊断单元17、20。当停止标志激活时,频率诊断单元17、20将由频率测量单元16、19输出的脉冲信号的频率与预设上限频率f
max
进行比较。这是为了确定在生成如图4所例示的利萨如波形21的情况下发生了异常。
[0054]
即,在生成了如图4所例示的利萨如波形21的情况下,停止确定处理单元15、18确定即使主轴(被测对象)正在旋转时也是正在停止的(即,停止标志激活),因此并不能检测编码器中的异常。然后,在该示例中,在停止标志激活的情况下,将脉冲信号的频率与上限频率f
max
进行比较,并且在脉冲信号的频率超出上限频率f
max
的情况下,确定发生了异常。
[0055]
上限频率f
max
被设置为可以排除主轴细微振荡情况的值。也就是说,不仅当编码器中发生异常时而且当主轴细微振荡时,停止标志均是激活的。在主轴细微振荡的情况下,脉冲信号的频率是非零的,但是该状态不对应于编码器中的异常。然后,将上限频率f
max
设置为充分大于当发生细微振荡时获得的脉冲信号频率的值,从而防止将细微振荡确定为异常。
[0056]
将参考图6和图7来描述上限频率f
max
的设置。图6是例示了在振荡状态下的利萨如波形21的示例的视图。图7是示例了脉冲化电路5的输入/输出关系的曲线图。脉冲化电路5大体上包括滞回比较器。因此,在脉冲化电路输入信号25的振荡幅度小于特定滞回宽度26的情况下,脉冲化电路5不输出脉冲信号27。在这种情况下,由频率测量单元19输出的频率变为零。因此,在频率测量单元19输出非零频率的情况下,可以说已经发生具有等于或大于滞回宽度26幅度的振荡。
[0057]
这里,由于编码器的异常所生成的如图4所例示的利萨如波形21时的脉冲信号27的频率很高,使得在主轴的正常振荡状态下不能生成该脉冲信号27。在该示例中,在主轴的正常振荡状态下允许的上限频率被设置为上限频率f
max
。例如,基于主轴的控制周期tc来确定上限频率f
max
。当主轴的控制周期为tc时,或者当频率为1/tc时,不能向主轴输出超出奈奎斯特(nyquist)频率(1/(2
·
tc))的命令。即,可以说(1/(2
·
tc))是在主轴的正常振荡状态下所允许的上限频率。因此,上限频率被设置为f
max
=(1/(2
·
tc)),并且可以确定在脉冲信号27的频率超过f
max
=(1/(2
·
tc))的情况下发生了异常。
[0058]
作为另一模式,可以基于主轴的允许最大加速度α
max
来确定上限频率f
max
。即,如上面所述的,在获得脉冲信号27时,正弦波形或余弦波形的波峰到波峰变得等于或大于滞回宽度26(下文中称为“滞回宽度δh”)。因此,在脉冲信号27变化是最小幅度的情况下,在图6所例示的利萨如波形21的情况下,在编码器的一个齿中,主轴角度θ以(δh/2)的幅度振荡。主轴角度θ由下面的表达式1表示,其中,z是编码器的齿数,t是时间,φ是初始相位。
[0059]
θ=(δh/2)
×
(1/z)
×
sin(2πf
·
t+φ)
ꢀꢀꢀꢀꢀ
表达式1
[0060]
通过对表达式1进行两次微分来获得加速度α,并且加速度α由表达式2表示。
[0061]
α=-(δh
×
2π2f2)/z
×
sin(2f
·
t+φ)
ꢀꢀꢀꢀꢀꢀꢀ
表达式2
[0062]
可以将加速度α变为最大加速度α
max
时的频率f设置为上限频率f
max
。因此,通过将表达式2中的α替换为α
max
针对频率f求解表达式来获得上限频率f
max
,并且f
max
由下面的表达式3表示。
[0063]fmax
=1/π
×
((α
max
·
z)/(2δh))
1/2
ꢀꢀꢀꢀꢀ
表达式3
[0064]
因此,当基于控制周期或最大加速度来确定上限频率f
max
时,可以彼此区分地检测编码器中的细微振荡和异常,并且可以更准确地检测编码器中的异常。本文示例的确定上限频率f
max
的方法仅是示例,并且所述上限频率可以是能够区分编码器中的细微振荡和异常的任何值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1