分注装置的制作方法
1.本发明涉及一种分注装置。
背景技术:
2.以往,有时在使用液状的试样和液状的试剂等进行分析的分析装置中,具备用于分注试剂和试样的分注装置。具备分注装置的分析装置能够从试样容器分注试样,或者从试剂容器分注混合到试样中的试剂(例如,参照专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2018-4557号公报
技术实现要素:
6.发明要解决的问题
7.在如上述那样的分注装置中分注试样等时,预先在缸体的下端部安装分注头。
8.具体地说,在用于保持至少一个以上的分注头的分注头保持件的上方配置用于保持至少一个以上的缸体的缸体保持件,当马达的驱动力被传递到缸体保持件时,缸体保持件的位置位移到下方的规定位置。当缸体保持件的位置位移时,在缸体的下端部和分注头的上端部形成的凹凸进行嵌合,来将分注头安装于缸体。
9.在将分注头安装于缸体时,对分注头和分注头保持件施加由缸体保持件向下方的位移引起的向下的荷重。另外,对缸体和缸体保持件施加阻力、也就是向上的荷重。因而,对缸体保持件施加与马达的驱动对应的同位移方向相反的方向的荷重,经由缸体保持件对马达施加负荷。
10.特别是在对多个缸体安装分注头的情况下,由于一次性地对多个缸体安装分注头,因此对马达施加的负荷进一步变大。例如在由于分注头的种类、分注头的品质的差异以及分注头未被正确地设置于分注头保持件而导致多个分注头中的一部分分注头的上端部位于比原来位置靠上方的位置的情况下,对马达进一步施加负荷。因而,在对多个缸体安装分注头的情况下,马达有可能失步。
11.在分注装置中,如果马达发生失步,则分注装置停止,因此已经分注的试样和试剂等被浪费。另外,根据情况需要呼叫服务人员。因而,在分注装置中,如果马达发生失步,则产生各种麻烦。
12.本发明是鉴于上述实际情况而完成的,其目的在于提供一种在对分注头装卸部安装多个分注头时能够减轻对马达施加的负荷的分注装置。
13.用于解决问题的方案
14.本发明的第一方式是一种分注装置,用于经由分注头进行液体的抽吸和排出,所述分注装置具备:马达;马达控制部;分注头装卸部,其能够装卸多个所述分注头;分注头保持件,其用于保持多个所述分注头;支承构件;以及驱动传递部,所述驱动传递部是包括传
递切换部的分注装置。所述马达控制部控制所述马达。所述支承构件以能够使多个所述分注头装卸部位移的方式来支承所述分注头装卸部。所述驱动传递部将所述马达的驱动力传递到所述支承构件。在随着所述分注头装卸部的位移而将保持于所述分注头保持件的多个所述分注头安装于该分注头装卸部时,如果对所述马达施加的过载超过上限值,则所述传递切换部将所述驱动传递部从传递所述马达的驱动力的传递状态切换为切断所述马达的驱动力的传递的非传递状态。
15.发明的效果
16.根据本发明,在对分注头装卸部安装多个分注头时,能够减轻对马达施加的负荷。
附图说明
17.图1是示出从侧面观察本发明的一个实施方式所涉及的分注装置的情况下的概要结构的概要图。
18.图2是示出本发明的一个实施方式所涉及的分注装置的电气结构的一例的框图。
19.图3是示出本发明的一个实施方式所涉及的传递切换部的周边的概要结构的一例的剖视图。
20.图4是示出本发明的一个实施方式所涉及的传递切换部的周边的概要结构的另一例的剖视图。
21.图5是示出从斜向观察本发明的一个实施方式所涉及的按压板和旋转构件的周边的情况下的概要结构的概要图。
22.图6是示出本发明的一个实施方式所涉及的ram的存储器图的一例的图。
23.图7是具体地示出本发明的一个实施方式所涉及的分注装置的电气结构的框图。
24.图8是示出本发明的一个实施方式所涉及的cpu的切换处理的一例的流程图。
具体实施方式
25.1.分注装置的整体结构
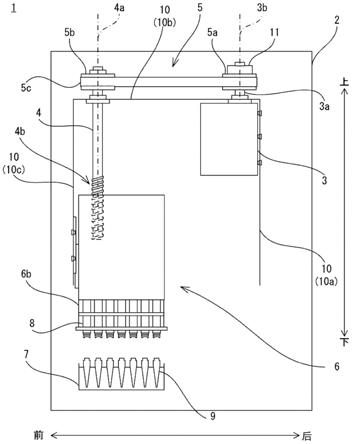
26.图1是示出从侧面观察本发明的一个实施方式所涉及的分注装置1的情况下的概要结构的概要图。此外,在图1中仅示出了对缸体8安装分注头9时所需要的结构。另外,图1也是示出对缸体8安装分注头9之前的状态的图。
27.本实施方式所涉及的分注装置1在壳体2内具备马达3、支承构件4、驱动传递部5、分注头装卸部6以及支承用板10(10a、10b、10c),通过驱动马达3,使分注头装卸部6的位置发生位移,来对缸体8安装分注头9。
28.马达3在壳体2内的后方经由支承构件被支承在支承用板10a上。在本实施方式中,作为马达3,使用步进马达。此外,马达3也可以使用其它通用的马达。
29.另外,马达3具备圆柱状的马达轴3a,当马达3被驱动时,马达轴3a以旋转轴线3b为中心进行旋转。
30.支承构件4在壳体2内的前方经由支承构件以能够旋转的方式被支承在支承用板10b上,以与旋转轴线3b平行的旋转轴线4a为中心进行旋转。
31.驱动传递部5是为了使马达3的驱动力传递到支承构件4而设置的。在本实施方式中,驱动传递部5由驱动皮带轮5a、从动皮带轮5b以及环状的皮带5c构成。此外,驱动皮带轮
5a和从动皮带轮5b是通用的皮带轮。
32.驱动皮带轮5a与旋转轴线3b同轴地设置。具体地说,驱动皮带轮5a设置在以旋转轴线3b为中心进行旋转的马达轴3a的外周面。也就是说,驱动皮带轮5a以旋转轴线3b为中心进行旋转。另外,驱动皮带轮5a有时经由其它构件等设置在马达轴3a的外周面。
33.从动皮带轮5b与旋转轴线4a同轴地设置。具体地说,从动皮带轮5b设置在以旋转轴线4a为中心进行旋转的支承构件4的外周面。也就是说,从动皮带轮5b以旋转轴线4a为中心进行旋转。此外,从动皮带轮5b在旋转轴线4a上设置在沿水平方向与驱动皮带轮5a并排的位置。另外,从动皮带轮5b有时经由其它构件等设置在支承构件4的外周面。
34.皮带5c在施加了张力的状态下、也就是在不弯曲的状态下设置在驱动皮带轮5a和从动皮带轮5b的外周面。因而,当马达轴3a根据马达3的驱动而进行旋转时,马达3的驱动力被传递到支承构件4,从而使支承构件4旋转。
35.支承构件4以能够使分注头装卸部6位移的方式支承该分注头装卸部6。在支承构件4的下端部形成用于作为螺纹发挥功能的齿4b。另外,支承构件4的齿4b经由未图示的螺母与分注头装卸部6机械地连结。此外,这里的螺母的位置与支承构件4的旋转相应地沿铅垂方向位移。进而,与螺母连结的分注头装卸部6的位置也同样地位移。
36.分注头装卸部6经由导轨等支承构件以能够沿铅垂方向滑动的方式被支承在支承用板10c上。另外,如上所述,支承构件4通过进行旋转,分注头装卸部6的位置沿铅垂方向位移,因此例如当支承构件4正向旋转时,分注头装卸部6的位置向下方位移。也就是说,当支承构件4正向旋转时,分注头装卸部6向分注头保持件7靠近。另外,当支承构件4反向旋转时,分注头装卸部6的位置向上方位移。也就是说,分注头装卸部6从分注头保持件7分离。
37.分注头装卸部6包括用于保持多个缸体8的缸体保持件6b,在缸体保持件6b上矩阵状地排列有多个缸体8。
38.分注头保持件7是为了保持多个分注头9而设置的。另外,在分注头保持件7上矩阵状地排列有多个分注头9。
39.分注头9形成为上下方向细长的筒状,特别是分注头9的下端部形成为顶端细的形状。
40.在对多个缸体8安装分注头9的情况下,如图1所示,将分注头保持件7配置在分注头装卸部6的下方。当将分注头保持件7配置在分注头装卸部6的下方时,分注头装卸部6向下方位移,在缸体8的下端部形成的凹凸和在分注头9的上端部形成的凹凸进行嵌合,由此将分注头9安装于缸体8。
41.虽然省略了图示,但在缸体8内设置有活塞。当在缸体8上安装有分注头9的状态下活塞上下移动时,例如利用分注头9抽吸液体(试样或试剂等)。此外,利用分注头9抽吸出的液体被保持在分注头9内。另外,通过使活塞上下移动,能够排出保持在分注头9内的液体。
42.另外,在本实施方式中,驱动传递部5包括传递切换部11。为了在对马达3施加的过载超过了上限值的情况下将驱动传递部5从传递马达3的驱动力的传递状态切换为切断马达3的驱动力的传递的非传递状态,而设置传递切换部11。
43.在本实施方式中,作为传递切换部11,使用扭矩限制器。另外,传递切换部11设置于旋转轴线3b。具体地说,传递切换部11设置在以旋转轴线3b为中心进行旋转的马达轴3a的外周面。此外,传递切换部11有时经由其它构件等设置在马达轴3a的外周面。
44.2.分注装置的电气结构
45.图2是示出本发明的一个实施方式所涉及的分注装置1的电气结构的一例的框图。如图2所示,分注装置1除了具备马达3等以外,还具备控制装置20、马达控制电路25、信号处理电路26以及检测传感器27。
46.另外,控制装置20、马达控制电路25以及信号处理电路26各自经由总线等电路24彼此电连接。另外,对马达控制电路25连接马达3,对信号处理电路26连接检测传感器27。
47.控制装置20负责分注装置1的整体的控制。控制装置20具备cpu(central processing unit:中央处理单元)21。另外,控制装置20具备cpu 21能够直接访问的ram(random access memory:随机存取存储器)22和存储部23。
48.cpu 21控制分注装置1的各部件。ram 22被用作cpu 21的工作区域和缓冲区域。存储部23是非易失性存储器,例如,使用hdd(hard disc drive:硬盘驱动器)或ssd(solid state drive:固态驱动器)等作为存储部23。
49.在存储部23中存储用于控制分注装置1的各部件的控制程序以及执行控制程序所需的数据(执行用数据)等。此外,存储部23也可以构成为包括ram22。
50.马达控制电路25生成用于驱动马达3的电压(驱动电压),并将驱动电压施加于马达3。
51.信号处理电路26是用于处理从检测传感器27输出的信号的电路,信号处理电路26例如包括用于将从检测传感器27输出的信号放大的放大电路。另外,信号处理电路26包括用于向检测传感器27供给电力的电路。
52.检测传感器27的详细情况在后文叙述,检测传感器27是为了检测驱动传递部5的状态而设置的。在本实施方式中,作为检测传感器27,使用通用的接近传感器。
53.此外,如果能够检测驱动传递部5的状态,则既可以使用光学传感器或超声波传感器等其它非接触式传感器作为检测传感器27,也可以使用接触式传感器作为检测传感器27。
54.另外,虽然在图1中未图示,但检测传感器27设置在传递切换部11的周边(参照图3和图4)。
55.3.传递切换部的周边的结构
56.图3和图4是示出本发明一个实施方式所涉及的传递切换部11的周边的概要结构的例子的剖视图。另外,图3是示出驱动传递部5对应于传递状态的情况下的传递切换部11的周边的概要结构的一例的剖视图,图4是示出驱动传递部5对应于非传递状态的情况下的传递切换部11的周边的概要结构的一例的剖视图。
57.如图3和图4所示,作为筒状的构件的安装构件110嵌入马达轴3a并固定,传递切换部11经由安装构件110设置于马达轴3a。另外,驱动皮带轮5a经由传递切换部11设置于安装构件110。即,驱动皮带轮5a经由传递切换部11和安装构件110设置于马达轴3a。
58.传递切换部11包括按压板11a、固定板11b、多个施力构件11c、多个卡合构件11d、轴承11e以及旋转构件11f。
59.按压板11a和固定板11b是圆形形状的板,按压板11a被设置为通过在比驱动皮带轮5a靠上方的位置处贯穿于安装构件110而能够沿铅垂方向位移。
60.另外,固定板11b在比按压板11a靠上方的位置处被安装于安装构件110。按压板
11a和固定板11b经由施力构件11c连结,以旋转轴线3b为中心与马达轴3a的旋转同步地旋转。
61.施力构件11c是为了对按压板11a施加荷重而设置的,作为施力构件11c,使用压缩弹簧。在该情况下,如图3和图4所示,施力构件11c在铅垂方向上设置在按压板11a与固定板11b之间。
62.具体地说,施力构件11c的一个端部抵接于按压板11a的与固定板11b相向的面,另一个端部抵接于固定板11b的与按压板11a相向的面。
63.另外,施力构件11c以被压缩的状态设置在按压板11a与固定板11b之间。在图3和图4所示的例子中,对按压板11a施加由施力构件11c引起的向下的荷重。
64.另外,在安装构件110上形成有用于作为螺纹发挥功能的齿110a,固定板11b被拧入安装构件110。通过调整固定板11b的拧入量,能够使固定板11b与按压板11a的间隔变化。由此,能够使施力构件11c的压缩量变化来调整对按压板11a施加的荷重。
65.另外,在本实施方式中,驱动皮带轮5a经由轴承11e和旋转构件11f设置于安装构件110。具体地说,轴承11e的内圈安装于安装构件110的外周面,旋转构件11f安装于轴承11e的外圈。另外,驱动皮带轮5a使用螺纹等固定件5d固定于旋转构件11f。
66.此外,也可以使用通用的滑动轴承来代替通用的滚动轴承、即轴承11e。
67.多个卡合构件11d形成为大致球体状,是为了使按压板11a和旋转构件11f同步地旋转而设置的。卡合构件11d被设置为在按压板11a上从与驱动皮带轮5a相向的面突出。当按压板11a旋转时,卡合构件11d各自也同样地以旋转轴线3b为中心进行旋转。
68.另外,在旋转构件11f的与按压板11a相向的面上形成有用于嵌入卡合构件11d的多个凹部11g。此外,凹部11g形成为向下方凹陷的大致圆锥状。并且,如图3所示,凹部11g各自形成为:在卡合构件11d嵌入与该卡合构件11d对应的凹部11g的情况下,按压板11a和旋转构件11f不抵接。
69.图5是示出从斜向观察本发明的一个实施方式所涉及的按压板11a和旋转构件11f的周边的情况下的概要结构的概要图。此外,在图5中,省略马达轴3a、轴承11e以及安装构件110等的图示。
70.如上所述,在旋转构件11f中形成有多个凹部11g,在按压板11a中设置有多个卡合构件11d。在本实施方式中,在铅垂方向上凹部11g各自与成对的卡合构件11d重合的情况下,各卡合构件11d嵌入各凹部11g中。
71.在本实施方式中,如图5所示,多个凹部11g在从各个凹部11g到旋转轴线3b的距离相同的位置且圆周方向上的凹部11g之间的距离互不相同的位置处形成于旋转构件11f。
72.由此,在使按压板11a相对于旋转构件11f相对地旋转了一周的情况下,仅在特定的一个旋转位置处嵌入与凹部11g一一对应的卡合构件11d。也就是说,在使按压板11a相对地旋转了一周的情况下,卡合构件11d仅在特定的一个旋转位置处嵌入各凹部11g。
73.另外,例如多个凹部11g也可以在圆周方向上的凹部11g之间的各个距离相同的位置且从各个凹部11g到旋转轴线3b的距离互不相同的位置处形成于旋转构件11f。
74.并且,多个凹部11g也可以在从各个凹部11g到旋转轴线3b的距离互不相同的位置且圆周方向上的凹部11g之间的距离互不相同的位置处形成于旋转构件11f。关于这些情况,设置卡合构件11d的位置也是同样的。
75.此外,根据固定板11b的拧入量、即施力构件11c的压缩位移量、卡合构件11d的突出量、卡合构件11d的形状、凹部11g的深度以及凹部11g的形状等,来确定对马达3施加的过载的上限值。另外,对马达3施加的过载上限值被设定为马达3不失步的范围的值。
76.在驱动传递部5为传递状态的情况下,如图3所示,各卡合构件11d嵌入所对应的凹部11g。当马达轴3a旋转时,卡合构件11d钩挂于凹部11g,驱动皮带轮5a与按压板11a及固定板11b同步地旋转。
77.在驱动传递部5为传递状态的情况下,如果对马达3施加的过载超过上限值,则在卡合构件11d和凹部11g的接地面上发生滑动,嵌入到凹部11g的卡合构件11d从凹部11g脱离。另外,由于卡合构件11d从凹部11g脱离,驱动传递部5从传递状态切换为非传递状态。
78.在驱动传递部5为非传递状态的情况下,卡合构件11d在旋转构件11f的与按压板11a相向的面上滑动接触。
79.在该情况下,随着马达轴3a的旋转,按压板11a和固定板11b旋转,但由于卡合构件11d在与旋转构件11f滑动接触的状态下以旋转轴线3b为中心进行旋转,因此旋转构件11f和驱动皮带轮5a不旋转。
80.另外,如图5所示,嵌入到凹部11g的卡合构件11d在未形成该凹部11g的位置处与旋转构件11f滑动接触,因此按压板11a的位置向上方位移。
81.并且,由于在传递切换部11的周边设置有检测传感器27,因此利用检测传感器27检测按压板11a的位移。另外,按压板11a由于切换驱动传递部5的状态而位移,因此根据从检测传感器27输出的信号来检测驱动传递部5的状态。
82.在像这样构成的分注装置1中,如果在将保持于分注头保持件7的多个分注头9安装于分注头装卸部6时由检测传感器27检测到驱动传递部5的非传递状态、也就是对马达3施加的过载超过上限值,则暂时停止马达3的驱动。另外,当停止马达的驱动时,为了将驱动传递部5从非传递状态切换(恢复)为传递状态而再次驱动马达3。
83.在将驱动传递部5从非传递状态切换为传递状态时使马达轴3a向与先前的旋转方向相同的旋转方向旋转的情况下,驱动皮带轮5a有可能也同样地旋转,也就是说分注头装卸部6有可能进一步向下方位移。即,有可能对马达3施加负荷。
84.因而,在本实施方式中,在使驱动传递部5从非传递状态恢复为传递状态时,为了防止对马达3施加负荷,使马达轴3a向与先前的旋转方向相反的方向旋转。
85.另外,在将驱动传递部5从非传递状态切换为传递状态的情况下,为了提高驱动传递部5的切换精度,以使马达轴3a至少以比将分注头9安装于分注头装卸部6时的旋转速度慢的旋转速度、具体而言以比使分注头装卸部6接近分注头保持件7时的旋转速度慢的旋转速度旋转的方式来控制马达3。
86.并且,在本实施方式中,当驱动传递部5从非传递状态切换为传递状态时,仍旧使马达轴3a继续旋转,使分注头装卸部6从分注头保持件7分离。
87.另外,在使分注头装卸部6从分注头保持件7分离后,例如使分注头装卸部6沿水平方向移动到其它位置,以使安装于分注头装卸部6的分注头9脱离。此外,对于驱动传递部5从非传递状态切换为传递状态之后的动作没有特别地限定。
88.4.存储器图。
89.图6是示出本发明的一个实施方式所涉及的ram 22的存储器图50的一例的图。如
图6所示,ram 22包括程序区域51和数据区域52,程序区域51用于存储从存储部23预先读出的控制程序。控制程序包含检测程序51a和马达控制程序51b等。
90.检测程序51a是用于根据从检测传感器27输出的信号来检测驱动传递部5的传递状态或非传递状态的程序。
91.马达控制程序51b是用于控制马达3的程序。另外,马达控制程序51b包含切换程序51c。
92.切换程序51c是如下的程序:如果在将分注头9安装于缸体8时利用检测程序51a检测到驱动传递部5的非传递状态,则在暂时停止马达3的驱动后,以使马达轴3a向与先前的旋转方向相反的旋转方向旋转的方式驱动马达3,直到至少利用检测程序51a检测到驱动传递部5的传递状态为止。另外,在随着执行切换程序51c而使马达轴3a变为与先前的旋转方向相反的旋转方向时,使用后述的旋转用速度数据52a。
93.此外,虽然省略了图示,但在程序区域51中存储有检测程序51a和马达控制程序51b以外的控制程序。
94.在数据区域52中存储预先从存储部23读出的执行用数据。在图6所示的例子中,在数据区域52中存储旋转用速度数据52a。旋转用速度数据52a是表示将驱动传递部5从非传递状态切换为传递状态时的马达轴3a的旋转速度的数据。
95.另外,在数据区域52中存储其它执行用数据,或者暂时存储与从检测传感器27输出的信号对应的数据。在数据区域52中还设置有执行控制程序所需要的计时器(计数器)和寄存器。
96.5.分注装置的具体的电气结构
97.图7是具体地示出本发明的一个实施方式所涉及的分注装置的电气结构的框图。在包括cpu 21的控制部200中,cpu 21通过执行检测程序51a,来作为检测驱动传递部5的传递状态或非传递状态的检测处理部28发挥功能,cpu 21通过执行马达控制程序51b,来作为控制马达3的马达控制部29发挥功能。
98.在图7所示的例子中,控制部200作为检测处理部28和马达控制部29发挥功能,例如如果在将分注头9安装于缸体8时由检测处理部28检测到驱动传递部5的非传递状态,则马达控制部29在暂时停止马达3的驱动后,使用存储在ram 22中的旋转用速度数据52a,以使马达轴3a向与先前的旋转方向相反的旋转方向旋转的方式控制马达3,直到至少由检测处理部28检测到驱动传递部5的传递状态为止。此外,也可以使用存储在存储部23中的旋转用速度数据52a。
99.图8是示出本发明的一个实施方式所涉及的cpu 21的切换处理的一例的流程图。例如在对缸体8安装分注头9时开始进行切换处理。
100.在步骤s1中,判断是否检测到驱动传递部5的非传递状态。如果在步骤s1中为“否”、也就是说如果检测到驱动传递部5的传递状态,则重复进行步骤s1。另一方面,如果在步骤s1中为“是”、也就是说如果检测到驱动传递部5的非传递状态,则进入步骤s2。
101.在步骤s2中,停止马达3的驱动,在经过规定的时间后进入步骤s3。
102.在步骤s3中,以使马达轴3a向与先前的旋转方向相反的旋转方向旋转的方式驱动马达3,在使马达轴3a旋转约一周(例如380
°
)的期间,在继步骤s3之后的步骤s4中判断是否检测到驱动传递部5的传递状态。
103.如果在步骤s4中为“否”、也就是说如果检测到驱动传递部5的非传递状态,则重复进行步骤s4。另一方面,如果在步骤s4中为“是”、也就是说如果检测到驱动传递部5的传递状态,则在步骤s5中执行其它处理。这里的其它处理例如是用于继续驱动马达3以使安装于分注头装卸部6的分注头9脱离的处理。
104.6.变形例
105.此外,在本实施方式中,驱动传递部5也可以由齿轮和轴等其它构件构成。在该情况下,至少驱动皮带轮5a和从动皮带轮5b被置换为通用的齿轮。
106.并且,传递切换部11并不限于设置于马达轴3a的结构,也可以设置于构成驱动传递部5的其它任一个构件。
107.并且,在将驱动传递部5从非传递状态切换为传递状态时,也可以使马达轴3a向与先前的旋转方向相同的方向旋转。在该情况下,如果驱动传递部5从非传递状态切换为传递状态,则使马达轴3a向与先前的旋转方向相反的旋转方向旋转,以使分注头装卸部6从分注头保持件7分离。
108.另外,在将驱动传递部5从非传递状态切换为传递状态时,也可以与从检测传感器27输出的信号无关地使马达轴3a大约旋转一周。但是,在该情况下,使马达轴3a向与先前的旋转方向相反的旋转方向旋转。
109.并且,在将驱动传递部5从非传递状态切换为传递状态时,在暂时停止马达3的驱动后再次驱动马达3,但也可以持续驱动马达3。
110.7.方式
111.本领域技术人员能够理解的是,上述多个例示性的实施方式是以下方式的具体例。
112.(第一项)一个方式所涉及的分注装置用于经由分注头进行液体的抽吸和排出,所述分注装置具备:
113.马达;
114.马达控制部,其控制所述马达;
115.分注头装卸部,其能够装卸多个所述分注头;
116.分注头保持件,其用于保持多个所述分注头;
117.支承构件,其以能够使所述分注头装卸部的位置位移的方式来支承所述分注头装卸部;以及
118.驱动传递部,其将所述马达的驱动力传递到所述支承构件,
119.其中,所述驱动传递部包括传递切换部,在随着所述分注头装卸部的位置的位移而将保持于所述分注头保持件的所述多个分注头安装于该分注头装卸部时,如果对所述马达施加的过载超过上限值,则所述传递切换部将所述驱动传递部从传递所述马达的驱动力的传递状态切换为切断所述马达的驱动力的传递的非传递状态。
120.根据第一项所述的分注装置,在随着分注头装卸部的位移将多个分注头安装于分注头装卸部时,能够防止对马达施加超过上限值的过载,因此能够减轻对马达施加的负荷。
121.另外,由于不会超过马达的上限值,因此能够以固定的力对分注头装卸部安装多个分注头。
122.(第二项)在第一项所述的分注装置中,也可以是,
123.所述马达还具备以旋转轴线(3b)为中心进行旋转的马达轴,
124.所述传递切换部被设置于所述马达轴。
125.根据第二项所述的分注装置,仅通过在马达附近设置传递切换部,就能够减轻对马达施加的负荷,因此不设置大的设置空间就能够减轻对马达施加的负荷。另外,例如能够将以往的分注装置简单地改良为具有减轻对马达施加的负荷的功能的分注装置。
126.(第三项)在第一项或第二项所述的分注装置中,也可以是,
127.还具备检测部,所述检测部检测所述驱动传递部的非传递状态,
128.在将保持于所述分注头保持件的所述多个分注头安装于所述分注头装卸部时,如果由所述检测部检测到所述非传递状态,则所述马达控制部控制所述马达,以使所述马达向与先前的旋转方向相反的旋转方向进行旋转。
129.根据第三项所述的分注装置,在随着分注头装卸部的位移而将多个分注头安装于分注头装卸部时,即使驱动传递部从传递状态切换为非传递状态,也能够使驱动传递部从非传递状态恢复为传递状态。
130.另外,根据第三项所述的分注装置,由于马达向与先前的旋转方向相反的旋转方向旋转,因此至少不会对马达施加负荷,能够使驱动传递部从非传递状态恢复为传递状态。
131.并且,例如在随着使驱动传递部从非传递状态恢复为传递状态之后的分注头的更换而使分注头装卸部从分注头保持件分离的情况下,只要在驱动传递部从非传递状态恢复为传递状态之后持续地使马达旋转即可。即,能够与不进行反向旋转时相比更简单地将分注头装卸部与分注头保持件分离。
132.(第四项)在第三项所述的分注装置中,也可以是,
133.所述马达控制部在控制所述马达以使所述马达向与先前的旋转方向相反的旋转方向进行旋转时,以使所述马达至少以比将多个所述分注头安装于所述分注头装卸部时的旋转速度慢的旋转速度进行旋转的方式控制所述马达。
134.根据第四项所述的分注装置,能够提高将驱动传递部从非传递状态切换为传递状态时的精度。
135.附图标记说明
136.1:分注装置;2:壳体;3:马达;3a:马达轴;3b:旋转轴线;4:支承构件;4a:旋转轴线;4b:齿;5:驱动传递部;5a:驱动皮带轮;5b:从动皮带轮;5c:皮带;6:分注头装卸部;6b:缸体保持件;7:分注头保持件;8:缸体;9:分注头;10:支承用板;11:传递切换部;11a:按压板;11b:固定板;11c:施力构件;11d:卡合构件;11e:轴承;11f:旋转构件;11g:凹部;20:控制装置;21:cpu;22:ram;23:存储部;24:总线;25:马达控制电路;26:信号处理电路;27:检测传感器;28:检测处理部;29:马达控制部;110:安装构件;110a:齿;200:控制部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1