电容式力传感器、检测设备所承受外力的测量方法与流程
本技术实施例涉及力传感器,尤其涉及一种基于电容变化的、多维力的电容式力传感器,以及采用电容式力传感器检测设备所承受外力的测量方法。
背景技术:
1、多维力传感器能够实现空间力和力矩的测量,被广泛应用在机器人、航空航天、机械加工、汽车制造以及多自由度精密组装等领域中。其中,基于电容变化的多维力传感器因为同时兼顾不易受温度影响、精度和分辨率高、属于非接触测量等特点,从而被广泛采用。
2、基于电容变化的多维力传感器一般有三种方式,分别为面积变化型、间距变化型和介电常数变化型。目前,常采用的是基于面积变化以及间距变化原理而制得的多维力传感器。
3、图1示出了电容式多维力传感器的原理结构图,具体的工作原理包括:当有外力作用在该电容式多维力传感器时,弹性体03的形变带动动电极板02产生位移,该位移引起定电极板01和动电极板02之间的有效面积s和间距d中的至少一个参数发生变化,当有效面积s和间距d中的至少一个参数发生变化时,会引起电容变化,通过测量电容变化量来表征该多维力传感器所承受外力的大小。
4、在一些情况下,多维力传感器受到外力作用引起弹性体03的形变位移量比较小,因此可能会产生至少以下现象:1)有效面积s变化微小,电容量变化非常小,使得该多维力传感器灵敏度较低;2)动电极板02和定电极板01之间的初始间距较大时,间距d变化微小,电容量变化微小,传感器灵敏度也较低。
5、为了提升该多维力传感器的灵敏度,可以通过增大定电极板01和动电极板02之间的有效面积来提升微小位移情况下的面积变化,这将导致该多维力传感器的整体体积增大;或者,还可以通过减小定电极板01和动电极板02之间的初始间距(例如,初始间距减小到100~200μm)来提升微小间距变化情况下的电容变化,但是,这可能引起该传感器加工和安装难度增大,给制造工艺提出挑战。
6、基于上述多维力传感器存在的技术问题,需要提出一种可提升测量灵敏度,以提升使用性能的多维力传感器。
技术实现思路
1、本技术提供一种电容式力传感器,以及利用电容式力传感器检测设备所承受外力的测量方法。主要目的是为了在不增加传感器体积、不提升工艺难度的前提下,提供一种可提升测量灵敏度的、多维力的电容式力传感器。
2、为达到上述目的,本技术的实施例采用如下技术方案:
3、第一方面,本技术提供了一种电容式力传感器,该电容式力传感器可以被应用在机器人、航空航天、机械加工、汽车制造等设备中,用于测量这些设备所受的空间外力大小。
4、该电容式力传感器包括第一电极板、第二电极板、弹性体和至少一个电极组;第二电极板与第一电极板相对设置,且第一电极板和第二电极板之间具有间距,第一电极板和第二电极板中的其中一个为定电极板,另一个为动电极板,弹性体与动电极板固定连接,弹性体能够带动动电极板相对定电极板沿平行定电极板的方向和垂直定电极板的方向移动,以及能够带动动电极板相对定电极板沿平行定电极板的轴线和垂直定电极板的轴线转动,也就是说,第一电极板和第二电极板中的其中一个能够相对另一个运动;另外,任一电极组包括:多个相互电连接的第一电极、多个相互电连接的第二电极和多个相互电连接的第三电极,多个第一电极和多个第二电极均设置在第一电极板的相对第二电极板的面上,且多个第一电极和多个第二电极依次交替排布,多个第三电极设置在第二电极板的相对第一电极板的面上,且第一电极、第三电极和第二电极错位设置,任一第三电极与其相邻的第一电极和第二电极形成耦合结构,并且任一第一电极或者任一第二电极属于一个独立的耦合结构,动电极板相对定电极板运动时,多个第一电极和多个第三电极形成第一电容器,多个第二电极和多个第三电极形成第二电容器。
5、基于上述对本技术给出的电容式力传感器结构的描述,可以看出,该电容式力传感器是一种容栅式的栅状结构。并且,动电极板在弹性体的带动下,可以相对定电极板不仅能够沿平行定电极板的方向和垂直定电极板的方向移动,还能够沿平行定电极板的轴线和垂直定电极板的轴线转动。也就是,该力传感器不仅属于面积变化型传感器,还属于间距变化型传感器。
6、该力传感器在微小的位移下,属于面积变化型的此传感器的电容变化会明显的高于现有技术的普通平板状传感器结构的电容变化。具体的,比如,当动电极板相对定电极板沿平行于定电极板的方向移动δx时,在现有技术中,面积变化为h×δx(h为动电极板的与动电极板移动方向相垂直方向的尺寸),然而,在本技术中,由于位于第一电极板上的第一电极和第二电极均具有多个,位于第二电极板上的第三电极也具有多个,如此的话,当动电极板相对定电极板沿平行于定电极板的方向移动δx时,本技术的面积变化为n×h×δx(n示为第一电极、第二电极、第三电极个数较小的数量),从而,由n×h×δx相比h×δx,可以看出,本技术可以明显的增加面积变化,进而,会明显的提升电容变化,最终会有效的提升灵敏度。
7、除此之外,在本技术中,是通过在第一电极板和第二电极板上相对应的设置多个第一电极、多个第二电极和多个第三电极,以使得多个第一电极和多个第三电极形成第一电容器,多个第二电极和多个第三电极形成第二电容器的方式,来提升面积变化量,从而提升电容变化量。可以这样理解,可以将现有技术的一个尺寸较大的电极分割成多个电极,这样的话,在增加面积变化量、提升电容变化量的基础上,并未增加整个传感器的尺寸;另外,也并未缩小两个电极板之间的间距来提升灵敏度。所以说,本技术给出的电容式力传感器在不增大传感器体积、提升工艺难度的基础上,就可以提升测量灵敏度。
8、在第一方面可能的实现方式中,沿多个第一电极和多个第二电极的排布方向,任一第一电极和任一第二电极的宽度均为w1,每相邻的第一电极和第二电极的宽度为w2,且任一第三电极的宽度为w,每相邻两个第三电极之间的宽度为w,其中,w=w1+w2。
9、当第一电极、第二电极和第三电极满足上述尺寸限定时,第一电容器的电容值和第二电容器的电容值呈线性变化,这样,就可以简化模型复杂度和降低解算难度。
10、上述实现方式中的宽度尺寸可以是线性宽度尺寸,也可能是角度宽度尺寸。
11、在第一方面可能的实现方式中,至少一个电极组包括第一电极组;在第一电极组中,多个第一电极和多个第二电极沿平行于第一电极板的第一方向呈直线形排布,多个第三电极的排布方向,与多个第一电极和多个第二电极的排布方向一致。也就是说,多个第三电极也沿第一方向呈直线形排布。
12、若将第一电极组中的多个第一电极和多个第二电极沿第一方向呈直线形排布的话,可以利用形成的第一电容器和第二电容器测量该传感器在x方向的力fx,其中这里的x方向是平行于第一方向的方向,或者,在设置多组沿第一方向的电极组时,还可以测得绕y方向的my、以及沿z方向的力fz,这里的y方向和z方向均是与x方向垂直的方向。
13、在第一方面可能的实现方式中,至少一个电极组包括第一电极组;在第一电极组中,多个第一电极和多个第二电极沿第一电极板的周向呈弧形排布,多个第三电极的排布方向,与多个第一电极和多个第二电极的排布方向一致。
14、若将第一电极组中的多个第一电极和多个第二电极沿第一电极板的周向呈弧形排布的话,可以利用形成第一电容器和第二电容器测量该传感器沿z方向的力fz。进一步的,当设置弧形排布的多组电极组时,还可以进一步的测量绕z方向轴的扭矩mz,同时也可测量mx和my。其中,这里的z方向是与第一电极板相垂直的方向,x方向和y方向均是与第一电极板相平行的方向,且x方向和y方向相垂直。
15、在第一方面可能的实现方式中,第一电极和第二电极在第二电极板上的正投影,在与多个第一电极和多个第二电极排布方向相垂直的方向上覆盖第三电极。
16、也就是说,沿与多个第一电极和多个第二电极排布方向相垂直的方向上,第一电极和第二电极的尺寸大于第三电极的尺寸,这样的话,当第一电极板相对第二电极板沿第一方向运动时,即使在第二方向(就是与多个第一电极和多个第二电极排布方向相垂直的方向)上也具有较小的位移量,也不会因为在第二方向的较小位移量导致第一电极板和第二电极板之间的有效面积的变化量可变,因此,这样设计可以保障测量的准确性。
17、在第一方面可能的实现方式中,第三电极在第一电极板上的正投影,在与多个第一电极和多个第二电极排布方向相垂直的方向上覆盖第一电极和第二电极。
18、可以这样理解,沿与多个第一电极和多个第二电极排布方向相垂直的方向上,第一电极的尺寸和第三电极的尺寸可以不相等,以及,第二电极的尺寸与第三电极的尺寸不相等。
19、在第一方面可能的实现方式中,至少一个电极组还包括第二电极组;第一电极组中的多个第一电极和多个第二电极,与第二电极组中的多个第一电极和多个第二电极,设置在第一电极板的中心的两侧;在第二电极组中,沿多个第一电极和多个第二电极的排布方向,任一第一电极和任一第二电极的宽度均为w1,每相邻的第一电极和第二电极的宽度为w2,且任一第三电极的宽度为w,每相邻两个第三电极之间的宽度为w,其中,w=w1+w2。
20、也就是说,该传感器除设置第一电极组之外,还设置第二电极组,由于第一电极组和第二电极组相对设置在第一电极板和第二电极板的中心的两侧,这样的话,可以进一步的增加面积变化,进一步提升电容变化量,从而可以进一步的提升灵敏度。
21、同样的,在上述的第二电极组中,宽度可以是线性宽度,或者可以是角度宽度。
22、在第一方面可能的实现方式中,在第一电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的第一侧边和第二侧边,第一侧边在第一电极板上的正投影与第一电极的中心线重合;在第二电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的第一侧边和第二侧边,第一侧边在第一电极板上的正投影与第一电极的中心线重合;其中,第一电极的中心线为第一电极的沿多个第一电极和多个第二电极的排布方向的中心线。
23、可以这样理解本技术给出的第一电极、第二电极和第三电极的布设方式,沿多个第一电极和多个第二电极的排布方向,第一电极具有中心线,第二电极也具有中心线,并且,第三电极的相对的两侧边分别与第一电极的中心线和第二电极的中心线相重合。也就是说,在任一耦合结构中,第三电极对称设置在第一电极和第二电极之间,如此设计的话,当将第一电容器的电容值与第二电容器的电容值差分时,差分信号大小变化是第一电容器电容值大小变化或第二电容器电容值大小变化的两倍,由此,可以进一步的提升电容变化大小。
24、在第一方面可能的实现方式中,电容式力传感器还包括处理器;处理器根据差分公式c1-=c1-c2求得c1-,根据差分公式c2-=c3-c4求得c2-;以及,根据求和公式c1+=c1+c2求得c1+,根据求和公式c2+=c3+c4求得c2+;处理器还根据c1-、c2-、c1+和c2+,计算电容式力传感器所承受的外力f;其中,c1为第一电极组中的第一电容器输出的电容值;c2为第一电极组中的第二电容器输出的电容值;c3为第二电极组中的第一电容器输出的电容值;c4为第二电极组中的第二电容器输出的电容值。
25、在第一方面可能的实现方式中,在第一电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的第一侧边和第二侧边,第一侧边在第一电极板上的正投影与第一电极的中心线重合;在第二电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的第一侧边和第二侧边,第一侧边在第一电极板上的正投影与第一电极和第二电极之间的间隙的中心线重合;其中,第一电极的中心线为第一电极的沿多个第一电极和多个第二电极的排布方向的中心线。
26、在该实施中,第一电极组中第一电极、第二电极和第三电极的布设方式,和第二电极组中第一电极、第二电极和第三电极的布设方式是不一样的。
27、在第一方面可能的实现方式中,电容式力传感器还包括处理器;处理器根据差分公式c1-=c1-c2求得c1-,以及根据差分公式c2-=c3-c4求得c2-;处理器还根据c1-和c2-,计算电容式力传感器所承受的外力f;其中,c1为第一电极组中的第一电容器输出的电容值;c2为第一电极组中的第二电容器输出的电容值;c3为第二电极组中的第一电容器输出的电容值;c4为第二电极组中的第二电容器输出的电容值。
28、由于第一电极组中第一电极、第二电极和第三电极的布设方式,和第二电极组中第一电极、第二电极和第三电极的布设方式是不一样的,那么,在计算传感器所承受的外力时,仅采用了差分处理方法,这样的话,可以降低计算复杂度,提高信号处理速率。
29、在第一方面可能的实现方式中,电容式力传感器还包括第三电极板,第三电极板设置在第二电极板的背离第一电极板的一侧;至少一个电极组还包括第三电极组;在第三电极组中,多个第一电极和多个第二电极设置在第三电极板的相对第二电极板的面,多个第三电极设置在第二电极板的相对第三电极板的面上;且第三电极组和第一电极组关于第二电极板对称布设。也就是说,在第三电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的第一侧边和第二侧边,第一侧边在第三电极板上的正投影与第一电极的中心线重合。
30、可以这样讲,本实施例给出的电容式力传感器包括依次层叠的第一电极板、第二电极板和第三电极板,且第二电极板的相对第一电极板和第三电极板的面上均设置有第三电极。这样设计,可以进一步加倍了面积变化型电容的灵敏度,另外,还可以增加间距变化型电容的灵敏度。
31、在第一方面可能的实现方式中,电容式力传感器还包括处理器;处理器根据差分公式c1u-=c1-c2求得c1u-,根据差分公式c1d-=c5-c6求得c1d-;以及,根据求和公式c1u+=c1+c2求得c1u+,根据求和公式c1d+=c5+c6求得c1d+;处理器还根据c1-=c1u-+c1d-和c1+=c1u+-c1d+,计算电容式力传感器所承受的外力f;其中,c1为第一电极组中的第一电容器输出的电容值;c2为第一电极组中的第二电容器输出的电容值;c5为第三电极组中的第一电容器输出的电容值;c6为第三电极组中的第二电容器输出的电容值。
32、当力传感器不仅包括第一电极板和第二电极板,还包括第三电极板时,且第三电极对称设置在第一电极和第二电极之间时,可以利用差分信号处理和加和信号处理方法,算得空间外力的大小值。
33、在第一方面可能的实现方式中,电容式力传感器还包括第三电极板,第三电极板设置在第二电极板的背离第一电极板的一侧;至少一个电极组还包括第三电极组;在第三电极组中,多个第一电极和多个第二电极设置在第三电极板的相对第二电极板的面,多个第三电极设置在第二电极板的相对第三电极板的面上;且第三电极组和第一电极组关于第二电极板对称布设,也就是说,在第三电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的第一侧边和第二侧边,第一侧边在第一电极板上的正投影与第一电极和第二电极之间的间隙的中心线重合。
34、同样的,通过增加第三电极板,可以进一步加倍了面积变化型电容的灵敏度,另外,还可以增加间距变化型电容的灵敏度。
35、在第一方面可能的实现方式中,电容式力传感器还包括处理器;处理器根据差分公式c1u-=c1-c2求得c1u-,根据差分公式c1d-=c5-c6求得c1d-;处理器还根据c1-=c1u-+c1d-,计算电容式力传感器所承受的外力f;其中,c1为第一电极组中的第一电容器输出的电容值;c2为第一电极组中的第二电容器输出的电容值;c5为第三电极组中的第一电容器输出的电容值;c6为第三电极组中的第二电容器输出的电容值。
36、在该可实现的方式中,由于第三电极的侧边与第一电极和第二电极之间的间距的中心线重合,进而,只需要采用差分信号处理方式,计算得到空间外力大小,并且,不仅对面积变化型电容器,对于间距变化型电容器,通过差分都可以提升测量灵敏度。
37、在第一方面可能的实现方式中,至少一个电极组还包括第五电极组;在第五电极组中,多个第一电极和多个第二电极沿第二方向排布在第一电极板的相对第二电极板的面上,多个第三电极设置在第二电极板的相对第三电极板的面上;第二方向与第一方向相垂直。
38、这样的话,可以对相垂直的第一方向和第二方向的力进行测量。比如,不仅对x方向的力fx、绕y方向轴的扭矩my、以及z方向的力fz,还可以测得y方向的力fy、绕x方向轴的扭矩mx、以及z方向的力fz。
39、在第一方面可能的实现方式中,相对的第一电极板和第二电极板上设置八组电极组,且八组电极组沿着第一电极板和第二电极板的周向间隔布设。
40、比如,八组电极组中的两组沿x方向布设,另两组沿y方向布设,再另两组沿+45°方向布设,剩下的两组沿-45°方向布设。如此的话,形成的该传感器可以被称为六维力传感器。
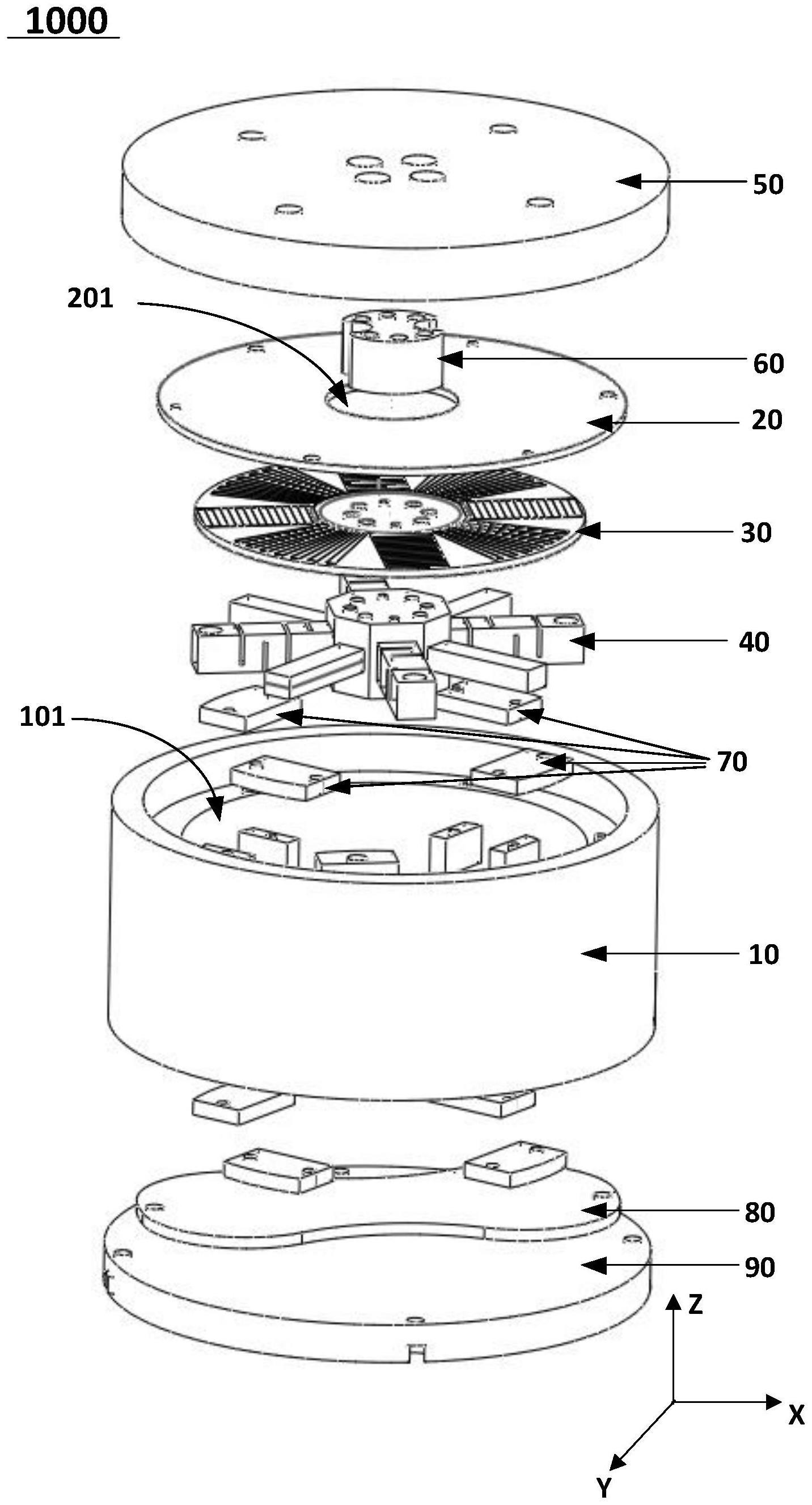
41、在第一方面可能的实现方式中,电容式力传感器还包括:主体和受力板,主体内形成有容纳腔;弹性体设置在容纳腔内,弹性体包括连接部和多个沿连接部周向布设的弹性臂,且弹性臂的远离连接部的一端与主体固定连接;第一电极板和第二电极板均设置在容纳腔内,第二电极板与弹性体相对设置,且与连接部固定连接,第一电极板设置在第二电极板的背离弹性体的一侧并与主体固定连接;受力板设置在容纳腔外,且与第二电极板固定连接。
42、该实施例提供的电容式力传感器在使用时,当外力作用在受力板上时,弹性臂会在受力板的带动下运动,进而带动第二电极板相对第一电极板运动,从而通过设置在第一电极板和第二电极板上的电极组测得所受外力大小。
43、在第一方面可能的实现方式中,电容式力传感器还包括电路板,电路板设置在容纳腔内,且和第二电极板相对设置在弹性体的两侧。用于对电容值进行处理的处理器可以位于该电路板上。
44、在第一方面可能的实现方式中,电容式力传感器还包括底座,且底座、主体和受力板可以围城密封的容纳腔,第一电极板、第二电极板和电路板可以设置在该密封的容纳腔内,以对这些电子元器件起到保护的作用。
45、第二方面,本技术提供了一种利用电容式力传感器检测设备所承受外力的测量方法,电容式力传感器安装在检测设备上,该电容式力传感器包括第一电极板、第二电极板、弹性体和至少一个电极组;第二电极板与第一电极板相对设置,且第一电极板和第二电极板之间具有间距,第一电极板和第二电极板中的其中一个为定电极板,另一个为动电极板,弹性体与动电极板固定连接,弹性体能够带动动电极板相对定电极板沿平行定电极板的方向和垂直定电极板的方向移动,以及能够带动动电极板相对定电极板沿平行定电极板的轴线和垂直定电极板的轴线转动;另外,任一电极组包括:多个相互电连接的第一电极、多个相互电连接的第二电极和多个相互电连接的第三电极,多个第一电极和多个第二电极均设置在第一电极板的相对第二电极板的面上,且多个第一电极和多个第二电极依次交替排布,多个第三电极设置在第二电极板的相对第一电极板的面上,且第一电极、第三电极和第二电极错位设置,任一第三电极与其相邻的第一电极和第二电极形成耦合结构,并且任一第一电极或者任一第二电极属于一个独立的耦合结构,动电极板相对定电极板运动时,多个第一电极和多个第三电极形成第一电容器,多个第二电极和多个第三电极形成第二电容器;
46、本实施例提供的测量方法包括:采集第一电容器的电容值,以及采集第二电容器的电容值;根据第一电容器的电容值和第二电容器的电容值,测得检测设备所承受外力f。
47、在本技术实施例提供的测量方法中,采用了上述实施例提供的电容式力传感器,由于在该传感器中,包括了设置在第一电极板上的多个第一电极和多个第二电极,以及设置在第二电极板上的多个第三电极,这样的话,相比现有技术的传感器,可以明显的增加面积变化,进而,会明显的提升电容变化,最终会有效的提升测量灵敏度。
48、在第二方面可能的实现方式中,沿多个第一电极和多个第二电极的排布方向,任一第一电极和任一第二电极的宽度均为w1,每相邻的第一电极和第二电极的宽度为w2,且任一第三电极的宽度为w,每相邻两个第三电极之间的宽度为w,其中,w=w1+w2;至少一个电极组包括第一电极组和第二电极组,第一电极组中的多个第一电极和多个第二电极,与第二电极组中的多个第一电极和多个第二电极,设置在第一电极板的中心的两侧;
49、采集第一电容器的电容值,以及采集第二电容器的电容值,包括:
50、采集第一电极组中的第一电容器输出的电容值c1,采集第一电极组中的第二电容器输出的电容值c2,采集第二电极组中的第一电容器输出的电容值c3,采集第一电极组中的第二电容器输出的电容值c4。
51、也就是,当包括关于第一电极板和第二电极板的中心相对设置的第一电极组和第二电极组时,需要对这两个电极组分别形成的电容值进行采用,再采用相对应的信号处理方法进行处理。
52、在第二方面可能的实现方式中,在第一电极组和第二电极组中的任一电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的第一侧边和第二侧边,第一侧边在第一电极板上的正投影与第一电极的中心线重合;
53、利用第一电容器的电容值和第二电容器的电容值,测得检测设备所承受外力f,包括:
54、根据差分公式c1-=c1-c2求得c1-,根据差分公式c2-=c3-c4求得c2-;以及,根据求和公式c1+=c1+c2求得c1+,根据求和公式c2+=c3+c4求得c2+;
55、再根据c1-、c2-、c1+和c2+,计算检测设备所承受外力f。
56、这里采用可差分信号处理,和加和信号处理,以计算得到f大小。
57、可以这样讲,不仅电容面积变化增多,可以提升力测量的灵敏度,通过差分方法,也可以使得电容信号变化加倍,进一步的提升测量灵敏度。
58、在第二方面可能的实现方式中,电容式力传感器还包括第三电极板,第三电极板设置在第二电极板的背离第一电极板的一侧;至少一个电极组还包括第三电极组,在第三电极组中,多个第一电极和多个第二电极设置在第三电极板的相对第二电极板的面,多个第三电极设置在第二电极板的相对第三电极板的面上,且第三电极组和第一电极组关于第二电极板对称布设;在第一电极组和第二电极组中的任一电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的第一侧边和第二侧边,第一侧边在第一电极板上的正投影与第一电极的中心线重合;
59、采集第一电容器的电容值,以及采集第二电容器的电容值,还包括:
60、采集第三电极组中的第一电容器输出的电容值c5,采集第三电极组中的第二电容器输出的电容值c6;
61、利用第一电容器的电容值和第二电容器的电容值,测得检测设备所承受外力f,包括:
62、根据差分公式c1u-=c1-c2求得c1u-,根据差分公式c1d-=c5-c6求得c1d-;
63、以及,根据求和公式c1u+=c1+c2求得c1u+,根据求和公式c1d+=c5+c6求得c1d+;
64、再根据c1-=c1u-+c1d-和c1+=c1u+-c1d+,计算检测设备所承受外力f。
65、当该力传感器不仅包括第一电极板和第二电极板,还包括第三电极板,并且,电极布设方式对称设置时,也可以通过差分信号处理和加和信号处理方式计算得到外力f。
66、同理的,通过增加第三电极板,可以进一步的增加电容面积变化,提升灵敏度。
67、在第二方面可能的实现方式中,在第一电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的第一侧边和第二侧边,第一侧边在第一电极板上的正投影与第一电极的中心线重合;在第二电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的一侧边和第二侧边,第一侧边在第一电极板上的正投影与第一电极和第二电极之间的间隙的中心线重合;
68、利用第一电容器的电容值和第二电容器的电容值,测得检测设备所承受外力f,包括:
69、根据差分公式c1-=c1-c2求得c1-,以及根据差分公式c2-=c3-c4求得c2-;
70、再根据c1-和c2-,计算检测设备所承受外力f。
71、当力传感器采用上述布设方式时,不仅对于面积变化型传感器,还是对于间距变化型传感器,仅可以采用差分信号处理方式,就可以得到外力f的大小。
72、在第二方面可能的实现方式中,电容式力传感器还包括第三电极板,第三电极板设置在第二电极板的背离第一电极板的一侧;至少一个电极组还包括第三电极组;在第三电极组中,多个第一电极和多个第二电极设置在第三电极板的相对第二电极板的面,多个第三电极设置在第二电极板的相对第三电极板的面上;且第三电极组和第一电极组关于第二电极板对称布设;在第一电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的第一侧边和第二侧边,第一侧边在第一电极板上的正投影与第一电极的中心线重合;在第二电极组中,沿多个第一电极和多个第二电极的排布方向,第三电极包括相对的第一侧边和第二侧边,第一侧边在第一电极板上的正投影与第一电极和第二电极之间的间隙的中心线重合;
73、采集第一电容器的电容值,以及采集第二电容器的电容值,还包括:
74、采集第三电极组中的第一电容器输出的电容值c5,采集第三电极组中的第二电容器输出的电容值c6;
75、利用第一电容器的电容值和第二电容器的电容值,测得检测设备所承受外力f,包括:
76、根据差分公式c1u-=c1-c2求得c1u-,根据差分公式c1d-=c5-c6求得c1d-;
77、再根据c1-=c1u-+c1d-,计算检测设备所承受外力f。
78、也就是,在具有第三电极板的情况下,电极按照上述方式布设时,仅通过差分方式就可以求得空间外力大小。
- 还没有人留言评论。精彩留言会获得点赞!