基于多光谱和时域反射的土壤多元污染物识别探头及方法
1.本发明涉及场地污染原位检测技术领域的一种探头和探测方法,尤其是涉及一种基于多光谱和时域反射的检测土壤多元污染物的深层贯入触探设备和触探检测方法。
背景技术:
2.我国现存垃圾填埋场两万余座,包括早期无规范可依建设的2.7万座简易填埋场和按当时国家标准建设的1800余座卫生填埋场。这些填埋场大部分未达到我国现行标准的要求,易发生填埋体滑坡、渗滤液渗漏污染地下水土和填埋气溢散污染空气三大环境灾害。中国环境监测总站数据显示,345座垃圾填埋场中85%存在严重渗漏,以北京市北天堂填埋场为例,其地下水土污染范围达数平方公里,深度达30m。除生活垃圾填埋场地,我国工业固废遗留堆填场也普遍地下水土污染问题,我国81处工业堆填场污染调查显示,超标率达34.9%。这些固体废物填埋场普遍有着污染源强高、污染位置埋藏深、土壤和地下水污染并存、污染物种类多等复合污染特征,包括以氨氮、总磷、氯化物、重金属离子为代表的离子型污染物,以化学需氧量cod、挥发性有机物voc、腐殖酸等有机类特征污染物,以及工业固废堆填场常见的以石油、农药为主的多环芳烃类污染物等。针对上述固体废物填埋场的严重环境问题,我国尚缺乏有效的针对场地多元污染物的原位深层检测设备及相关技术。
3.时域反射法(time domain reflectometry,tdr)是一种远程遥感测试技术,其工作原理即是由信号发生器激发的电脉冲以电磁波的形式沿着同轴电缆进行传播,如果脉冲遇到传播介质特性阻抗的变化,就会产生波的反射,信号接收器获取经反射的脉冲信号,根据传播速度以及发射脉冲与反射脉冲的时间间隔,即可计算传播介质的介电常数及电导率。介电常数可以反映土壤与地下水的相对占比情况(即含水率),电导率可以反映土壤被离子型污染物的污染程度,侧面表征氨氮、总磷、氯化物、重金属含量等污染指标。
4.激光诱导荧光检测技术(laser induced fluorescence,lif)目前主要应用于有机污染场地的现场原位测试,用以评价有机污染物种类等特性。含有特征官能团的有机污染物受到一定波长的激发光(如紫外光、可见光等)照射的时候,该物质会发射出波长大于照射光线的各种颜色和不同光强度的光线,而当照射光停止照射时,这种光线也随之很快消失,这种发射出的光线称为荧光。针对不同的有机污染物(腐殖酸、多环芳烃等),其具有不同波长的特征激发光,也会产生不同效果的荧光,通过对荧光影像进行捕捉识别,可根据图像色谱可以确定该污染物的类型,根据不同色谱的色光强度确定污染物的含量。
5.国内外基于tdr技术检测离子型污染物的相关原位检测设备公开较多。time-domain reflective cone penetration device(tw92113188a)是目前应用较为广泛的三针式tdr原位检测探头,适用于离子型污染土的电导率检测;用于napls污染砂性土场地勘察的原位连续贯入触探探头(cn201310022293.9)则采用四针式,进行了tdr检测有机型污染物的探索,但仅能实现定性识别,且在非饱和土中功能会得到部分限制;一种原位探测土体重金属污染成分及浓度的环境孔压静力触探探头(cn201710052441.x)采用缠绕式tdr探针,受探针刚度及敏感性影响,该类型更适合10m范围内的浅部土层。综上所述的设备tdr电
极尺寸均较大,在检测过程中不可避免会对土壤产生扰动,造成检测结果的变异性。
6.uvif、uvost等设备是国外最早出现的基于lif原理检测轻型非水相液体(lnapls)的原位检测探头(hosseini et al.,2010),oip则拓展了lif原理,将绿色激发光引入,实现了煤油类重型非水相液体(dnapls)的检测(mccall et al.,2018)。一种基于激光荧光诱导技术的土壤污染实时原位检测装置(cn201811224897.0)是国内现有公开的探头检测产品,但该发明并未对污染物类型及含量进行明确界定,并未对荧光信号进行定量化分析,且目标污染物过于单一化。我国暂无授权的较为成熟的多光谱原位检测探头。
技术实现要素:
7.为解决背景技术中存在的问题,本发明提供了一种基于多光谱和时域反射的土壤多元污染物识别探头及方法。
8.本发明适用于生活垃圾填埋场、建筑垃圾填埋场、工业固废堆填场等固体废物填埋场地的原位深层检测,本发明可测得土壤介电常数(间接表征体积含水率)、土壤电导率(间接表征氨氮、总磷、氯化物、重金属等离子型污染物含量)、280nm激发光下的荧光强度fi
280
(间接表征多环芳烃类污染物含量)、325nm激发光下的荧光强度fi
325
(间接表征腐殖酸等污染物含量),实现多元污染物的定量检测。同时获得土壤图片,辅助判断土壤类别。
9.本发明解决该技术问题所采用的技术方案是:
10.一、一种基于多光谱和时域反射的土壤多元污染物识别探头:
11.探头包括锥头、聚醚醚酮绝缘棒、镀金不锈钢探针、内窥镜图像传感器、氧化铝玻璃透镜、280nm波长紫外led、325nm波长紫外led、平面镜和不锈钢探杆;聚醚醚酮绝缘棒下端和锥头同轴连接,高强度镀金不锈钢探针镶嵌固定在聚醚醚酮绝缘棒外表面;聚醚醚酮绝缘棒上端和不锈钢探杆下端同轴连接,不锈钢探杆内部中空且在侧壁钻孔,钻孔处镶嵌氧化铝玻璃透镜,钻孔处的不锈钢探杆内部装有由内窥镜图像传感器、280nm波长紫外led、325nm波长紫外led及平面镜构成的多光谱检测模块,内窥镜图像传感器、280nm波长紫外led、325nm波长紫外led均接线引出。
12.所述的聚醚醚酮绝缘棒内部中空,同轴电缆穿入聚醚醚酮绝缘棒内部并穿出聚醚醚酮绝缘棒后焊接于高强度镀金不锈钢探针起始端部;内窥镜图像传感器、280nm波长紫外led、325nm波长紫外led均连接到控制电缆,控制电缆和同轴电缆在不锈钢探杆内集成为总线电缆,总线电缆尾端从不锈钢探杆上端穿出后再分出同轴电缆、控制电缆,并再分别焊接bnc接头、usb接头。
13.所述的镀金不锈钢探针分为外周探针、内周探针,沿贴合聚醚醚酮绝缘棒的圆柱曲面进行延展布置;所述的外周探针和内周探针均呈w形/m形,且拐点处均为u形直角拐点;所述的内周探针是由外周探针向内偏置固定距离而形成;所述的外周探针、内周探针均连接到同轴电缆,同轴电缆自内至外依次为内导体、绝缘层、编织层、外护套,内导体通过铜线与内周探针起始端部焊接,编织层通过铜线与外周探针起始端部焊接。
14.所述的内窥镜图像传感器带有光源,氧化铝玻璃透镜外表面是平面,内表面是凹面;280nm波长紫外led和325nm波长紫外led布设于平面镜两侧均朝向平面镜的中心,内窥镜图像传感器发出光线经平面镜反射后透过氧化铝玻璃透镜入射到不锈钢探杆外部的土体中产生反射和散射,或者是280nm波长紫外led/325nm波长紫外led发出光线透过氧化铝
玻璃透镜入射到不锈钢探杆外部的土体中产生反射和散射,不锈钢探杆外部进来的光线透过氧化铝玻璃透镜再经平面镜反射后入射到内窥镜图像传感器。
15.所述的内窥镜图像传感器包括光学成像芯片及其电路、镜头、可见光led照明灯,镜头安装在光学成像芯片及其电路上,可见光led照明灯共计八个,围绕镜头在周围布设。
16.所述的280nm波长紫外led和325nm波长紫外led均由led贴片式芯片、散热板、电路板叠合而成。
17.二、一种土壤多元污染物识别探头的污染探测方法,方法步骤如下:
18.第一步,将同轴电缆的bnc接头与信号发射器相连接,信号发生器与计算机相连接;将控制电缆的usb接头直接与计算机相连接;
19.第二步,利用静探车将所述土壤多元污染物原位识别探头贯入至污染场地所需探测位置,开始实施检测,每次检测时首先通过计算机控制发射电磁波信号,信号沿同轴电缆传至高强度镀金不锈钢探针,计算机显示电磁波在传播过程中由于介质阻抗变化而产生的反射信号,计算得到检测位置处的土壤介电常数与土壤电导率ec
soil
;
20.第三步,
21.280nm波长紫外led、325nm波长紫外led均处于关闭状态,接着通过计算机控制内窥镜图像传感器拍摄在可见光led照明灯照射情况下的土壤图片;
22.关闭可见光led照明灯,关闭325nm波长紫外led,打开280nm波长紫外led,拍摄土壤图片;
23.关闭可见光led照明灯,关闭280nm波长紫外led,打开325nm波长紫外led,拍摄土壤图片;
24.第四步,自所述土壤多元污染物原位识别探头完全进入地下后,开始进行检测,每贯入间隔的深度重复第二步、第三步测试一次,直至所述土壤多元污染物识别探头贯入至最大深度距离位置,完成最后一次测试,拔出所述土壤多元污染物原位识别探头;
25.第五步,
26.利用土壤电导率测试结果,绘制土壤电导率剖面曲线;
27.利用土壤介电常数测试结果,绘制土壤含水率剖面曲线;
28.基于hsv色彩模型,分析280nm波长紫外led照射下的土壤图片,得到280nm激发光下的荧光强度fi
280
,进而得到多环芳烃类污染物的剖面含量情况;
29.基于hsv色彩模型,分析325nm波长紫外led照射下的土壤图片,得到325nm激发光下的荧光强度fi
325
,进而得到腐殖酸类污染物的剖面含量情况;
30.得到不同深度位置的土壤照片,通过对比不同种类土壤的标准样图片,辅助判断土壤类别。
31.将检测到的土壤电导率ec
soil
代入以下公式计算得到土壤离子型污染物含量:
32.ec
soil
=a
·cionic
+ec
surface
33.式中,ec
soil
为土壤电导率,ec
surface
为土壤表面电导,c
ionic
为离子型污染物含量,a为计算参数。
34.将检测到的325nm激发光下的荧光强度fi
325
代入以下公式计算得到土壤腐殖酸含量:
35.fi
325
=b
·chumic
+d
36.式中,fi
325
为325nm激发光下的荧光强度,c
humic
为腐殖酸含量,b、d为计算参数。
37.将检测到的280nm激发光下的荧光强度fi
280
代入以下公式计算得到土壤多环芳烃含量:
38.fi
280
=e
·cpahs
+f
39.式中,fi
280
为280nm激发光下的荧光强度,c
pahs
为多环芳烃含量,e、f为计算参数。
40.本发明通过上述处理探测的信号建立了多种信号分别和多种土壤污染参数之间的关系,能够准确获得土壤污染参数,尤其是突破性地实现了通过荧光强度获得土壤腐殖酸含量。
41.本发明适用场景包括但不限于生活垃圾填埋场、建筑垃圾填埋场、工业固废填埋场在内存在多元污染物的污染场地。
42.本发明能通过tdr检测模块(包括聚醚醚酮绝缘棒、镀金不锈钢针、同轴电缆),可获得土壤介电常数、电导率等指标,表征离子型污染物含量;通过多光谱检测模块(包括内窥镜图像传感器、氧化铝玻璃透镜、280nm波长紫外led、325nm波长紫外led、平面镜、控制电缆),可获得325nm荧光强度、280nm荧光强度等指标及土壤图片,表征腐殖酸、多环芳烃等污染物含量,并反映土壤类别。
43.本发明便于携带、可快速获得多元污染物的含量信息,适用于固体废物填埋场地等场景的原位深层检测。
44.本发明的有益效果如下:
45.本发明除适用于生活垃圾填埋场、建筑垃圾填埋场、工业固废堆填场等固体废物填埋场地的原位深层检测外,还可应用于石油泄漏、工厂违规排放等场景的场地污染检测,甚至是海洋岩土工程领域的污染检测与原油探测项目。
46.本发明方便携带且结合tdr200信号发生器、计算机即可进行检测工作,工作条件要求低。检测周期短,可在1小时内完成一次30m深度的检测工作,极大地提高了污染检测效率。检测数据全面,不仅有综合反映离子型污染物含量的电学指标电导率,还有反映化学腐殖酸等有机型污染物含量的325nm荧光强度,以及反映石油、农药等多环芳烃类物质含量的280nm荧光强度,土壤的可见光图片和介电常数则可以辅助鉴定土壤的类别及含水率情况,实现对土壤基本特性、污染情况的全面判断。
47.相比于传统的实验室检测方法,本发明避免了采样、制样等测试前繁琐的准备工作,且快速、同步地获得多种污染指标,相比于不同指标需根据不同实验测定的传统检测,检测效率显著提升,且本发明属原位检测设备,避免了异位检测造成的土壤扰动及时间变异性造成的数据失真。能够承担高温、高压、强酸、强碱等恶劣自然环境下的检测工作。
48.相比于缠绕式、针板式的tdr检测模块,本发明通过弯折及曲面布置的方式,缩小了tdr探针所占空间,减小了探测过程中装置对目标土壤的扰动,避免了测试数据的失真。相比国外同类技术设备uvif、uvost,本发明有着280nm、325nm、可见光三种光谱激发光,且可通过更换激发光源的方式无限拓展可检光谱波长范围,实现了多光谱检测,功能性得到极大延展。且由于本发明可拍摄土壤图片辅助进行土壤类别鉴定,比起uvif、uvost等单光路检测设备,极大提升了检测可信度。相比国外同类技术设备oip(仅适用于多环芳烃检测),本发明拓展了应用边界,开拓了在生活垃圾填埋场的新应用领域。
49.本发明填补了我国国内现有研究领域的相关空白,是中国全面自主设计、自主研
发的首款基于多光谱和时域反射原理的原位深层贯入触探设备,是我国环境岩土工程研究领域的重大突破,是我国环境保护行业发展过程中的重要进展成果。
附图说明
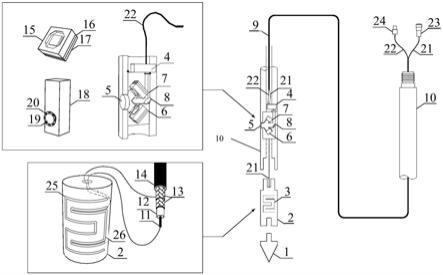
50.图1为本发明的设备结构图;
51.图2为本发明的系统整体连接方式示意图;
52.图3为本发明在典型固体废物填埋场应用场景得到的原始检测数据;
53.图4为本发明检出电导率与重金属cu
2+
含量的相关性对比图;
54.图5为本发明检出325nm荧光强度与腐殖酸含量的相关性对比图;
55.图6为本发明检出280nm荧光强度与柴油含量的相关性对比图;
56.图7为本发明测得的tdr波形与现有设备测得的tdr形对比图。
57.图中:锥头1,聚醚醚酮绝缘棒2,镀金不锈钢探针3,内窥镜图像传感器4,氧化铝玻璃透镜5,280nm波长紫外led6,325nm波长紫外led7,平面镜8,总线电缆9,不锈钢探杆10,内导体11,绝缘层12,编织层13,外护套14,led贴片式芯片15,散热板16,电路板17,光学成像芯片及其电路18,镜头19,可见光led照明灯20,同轴电缆21,控制电缆22,bnc接头23,usb接头24,外周探针25,内周探针26。
具体实施方式
58.下面结合附图和实施例对本发明进一步说明。
59.如图1所示,探头包括锥头1、聚醚醚酮绝缘棒2、镀金不锈钢探针3、内窥镜图像传感器4、氧化铝玻璃透镜5、280nm波长紫外led6、325nm波长紫外led7、平面镜8和不锈钢探杆10;
60.聚醚醚酮绝缘棒2下端和锥头1通过螺纹同轴连接,两根镀金不锈钢探针3镶嵌固定在聚醚醚酮绝缘棒2外表面;
61.聚醚醚酮绝缘棒2上端和不锈钢探杆10下端通过螺纹同轴连接,不锈钢探杆10内部中空且在侧壁钻孔,钻孔处镶嵌氧化铝玻璃透镜5,钻孔处的不锈钢探杆10内部装有由内窥镜图像传感器4、280nm波长紫外led6、325nm波长紫外led7及平面镜8构成的多光谱检测模块,内窥镜图像传感器4、280nm波长紫外led6、325nm波长紫外led7及平面镜8均接线引出。
62.聚醚醚酮绝缘棒2内部中空,同轴电缆21穿入聚醚醚酮绝缘棒2内部并穿出聚醚醚酮绝缘棒2后焊接于镀金不锈钢探针3起始端部;内窥镜图像传感器4、280nm波长紫外led6、325nm波长紫外led7均连接到控制电缆22,控制电缆22和同轴电缆21在不锈钢探杆10内集成为总线电缆9,总线电缆9尾端从不锈钢探杆10上端穿出后再分出同轴电缆21、控制电缆22,并再分别焊接bnc接头23、usb接头24。
63.镀金不锈钢探针3分为外周探针25、内周探针26,沿贴合聚醚醚酮绝缘棒2的圆柱曲面进行延展布置;外周探针25和内周探针26均呈w形/m形,且拐点处均为u形直角拐点,即拐点处由连续的三条折边形成,相邻两条折边之间相垂直布置;内周探针26是由外周探针25向内偏置固定距离而形成。
64.如图1中所示,外周探针25水平曲面延展40mm后进行第一次90
°
弯折,之后竖向延
展23mm后进行第二次90
°
弯折,弯折后延展方向与起始延展方向相向,延展30mm后发生第三次90
°
弯折,弯折后延展方向与第一次弯折后延展方向同向,延展12mm后发生第四次90
°
弯折,弯折后延展方向与起始延展方向相向,延展30mm后发生第五次90
°
弯折,弯折后延展方向与第一次弯折后延展方向同向,延展23mm后进行第六次90
°
弯折,弯折后延展方向与起始延展方向相向,延展40mm后达到外周探针25末端。
65.具体实施中,外周探针25和内周探针26的直径均为1mm,内周探针26相对于外周探针25的向内偏置距离为10mm,使得内周探针26的轨迹始终与外周探针25轨迹相对应平行并保持10mm的距离。
66.现有技术的探针多根直探针朝下布置或探针缠绕式布置,本发明却采用了内外的w形/m形的两根探针,通过弯折不仅能极大地减小了探针所占空间,而且还能减小了对周边土体的扰动,消除了挤压效应,进而避免了测试过程中的数据失真。
67.外周探针25、内周探针26均连接到同轴电缆21,同轴电缆21自内至外依次为内导体11、绝缘层12、编织层13、外护套14,内导体11通过铜线与内周探针26起始端部焊接,编织层13通过铜线与外周探针25起始端部焊接。
68.内窥镜图像传感器4带有光源,氧化铝玻璃透镜5外表面是平面,内表面是凹面;280nm波长紫外led6和325nm波长紫外led7布设于平面镜8两侧均朝向平面镜8的中心,平面镜8中心点与氧化铝玻璃透镜5中心点连线三条直线相交于氧化铝玻璃透镜5中心点,内窥镜图像传感器4发出光线经平面镜8反射后透过氧化铝玻璃透镜5入射到不锈钢探杆10外部的土体中产生反射和散射,或者是280nm波长紫外led6/325nm波长紫外led7发出光线透过氧化铝玻璃透镜5入射到不锈钢探杆10外部的土体中产生反射和散射,不锈钢探杆10外部进来的光线透过氧化铝玻璃透镜5再经平面镜8反射后入射到内窥镜图像传感器4。
69.平面镜8镜面与氧化铝玻璃透镜5镜面成45
°
,内窥镜图像传感器4镜头面与平面镜8镜面成45
°
,平面镜8将氧化铝玻璃透镜5外表面的图像通过光的反射传导至内窥镜图像传感器4;280nm波长紫外led6光路延长线、325nm波长紫外led7光路延长线、280nm波长紫外led6光路延长线均与平面镜8中心点和氧化铝玻璃透镜5中心点之间的连线的夹角成45
°
,平面镜8中心点和氧化铝玻璃透镜5中心点之间的连线与325nm波长紫外led7光路延长线的夹角成45
°
。
70.具体实施中,平面镜8中心点距氧化铝玻璃透镜5中心点30mm,内窥镜图像传感器4镜头中心点距平面镜8中心点34mm。
71.内窥镜图像传感器4包括光学成像芯片及其电路18、镜头19、可见光led照明灯20,镜头19安装在光学成像芯片及其电路18上,可见光led照明灯20共计八个,围绕镜头19在周围布设。
72.具体实施中,内窥镜图像传感器6长度23mm,宽度7mm,镜头19总厚度16mm,分辨率为1280
×
720,成像距离为10-50mm,焦距可调,工作电压5v。
73.280nm波长紫外led6和325nm波长紫外led7均由led贴片式芯片15、散热板16、电路板17叠合而成,尺寸均为20
×
20
×
10mm,功率均为5-10mw,发散角均为60
°
。
74.280nm波长紫外led6波长范围为275-285nm,中心波长280nm;325nm波长紫外led7波长范围为320-330nm,中心波长325nm。
75.本发明具体实施过程按照以下步骤进行操作:
76.第一步,如图2所示,将同轴电缆21的bnc接头23与tdr200信号发射器相连接,tdr200信号发生器与计算机相连接;将控制电缆22的usb接头24直接与计算机相连接;
77.第二步,利用静探车将土壤多元污染物原位识别探头贯入至污染场地所需探测位置,开始实施检测,每次检测时首先通过计算机控制tdr200发射电磁波信号,信号沿同轴电缆21传至高强度镀金不锈钢探针3,计算机显示电磁波在传播过程中由于介质阻抗变化而产生的反射信号,计算得到检测位置处的土壤介电常数与土壤电导率ec
soil
;
78.第三步,
79.280nm波长紫外led6、325nm波长紫外led7均处于关闭状态,接着通过计算机控制内窥镜图像传感器4拍摄在可见光led照明灯20照射情况下的土壤图片;
80.关闭可见光led照明灯20,关闭325nm波长紫外led7,打开280nm波长紫外led6,拍摄土壤图片;
81.关闭可见光led照明灯20,关闭280nm波长紫外led6,打开325nm波长紫外led7,拍摄土壤图片;
82.第四步,自土壤多元污染物原位识别探头完全进入地下后,开始进行检测,每贯入间隔的深度重复第二步、第三步测试一次,直至土壤多元污染物原位识别探头贯入至最大深度距离位置,完成最后一次测试,拔出土壤多元污染物原位识别探头;
83.第五步,
84.利用土壤电导率测试结果,绘制土壤电导率剖面曲线;
85.利用土壤介电常数测试结果,绘制土壤含水率剖面曲线;
86.基于hsv色彩模型,分析280nm波长紫外led6照射下的土壤图片,得到280nm激发光下的荧光强度fi
280
,进而得到多环芳烃类污染物的剖面含量情况;
87.基于hsv色彩模型,分析325nm波长紫外led7照射下的土壤图片,得到325nm激发光下的荧光强度fi
325
,进而得到腐殖酸类污染物的剖面含量情况;
88.得到不同深度位置的土壤照片,通过对比不同种类土壤的标准样图片,辅助判断土壤类别。
89.其中将检测到的土壤电导率ec
soil
代入以下公式计算得到土壤离子型污染物含量:
90.ec
soil
=a
·cionic
+ec
surface
91.式中,ec
soil
为土壤电导率,ec
surface
为土壤表面电导,c
ionic
为离子型污染物含量,a为计算参数。
92.其中将检测到的325nm激发光下的荧光强度fi
325
代入以下公式计算得到土壤腐殖酸含量:
93.fi
325
=b
·chumic
+d
94.式中,fi
325
为325nm激发光下的荧光强度,c
humic
为腐殖酸含量,b、d为计算参数。
95.其中将检测到的280nm激发光下的荧光强度fi
280
代入以下公式计算得到土壤多环芳烃含量:
96.fi
280
=e
·cpahs
+f
97.式中,fi
280
为280nm激发光下的荧光强度,c
pahs
为多环芳烃含量,e、f为计算参数。
98.下面结合某填埋场中的实施例来对本发明的使用作详细说明:
99.首先,如图2所示,将bnc接头与tdr200信号发射器相连接,tdr200信号发生器与计算机相连接;将usb接头直接与计算机相连接。
100.接着,利用静探车携带本发明至场地目标位置,开始实施贯入检测,由于场地表层为碎石层及水泥地面,因此当探头贯入至5.6m深度进入地下土层时开始进行测试。每次检测时首先通过计算机控制tdr200发射电磁波信号,信号沿同轴电缆传至镀金不锈钢探针,计算机显示电磁波在传播过程中由于介质阻抗变化而产生的反射信号,计算得到检测位置处的土壤介电常数(表征体积含水率)与电导率,如图3中volumetric water content、electrical conductivity数据所示。此时,280nm波长紫外led、325nm波长紫外led均处于关闭状态。首先通过计算机控制内窥镜图像传感器拍摄在可见光led照明灯照射情况下的土壤图片,辅助判断土壤类别,如图3中的soil picture in 12.5m即为12.5m深度位置的土壤图片;然后,关闭可见光led照明灯,325nm波长紫外led保持关闭,打开280nm波长紫外led,拍摄该情况下的土壤图片,随后针对该图片进行色谱分析,基于hsv色彩模型提取色彩深度进而得到相对荧光强度,如图3中280nm fluorescence所示,辅助判断多环芳烃种类及含量;可见光led照明灯保持关闭,关闭280nm波长紫外led,打开325nm波长紫外led,拍摄该情况下的土壤图片,随后针对该图片进行色谱分析,基于hsv色彩模型提取色彩深度进而得到相对荧光强度,如图3中325nm fluorescence所示,辅助判断渗滤液腐殖酸含量;至此,该深度位置的所有测试完成。
101.之后,将本发明贯入300mm,重复上述测试步骤,每次推进300mm直至探头达到21.8m深度位置,完成最后一次测试,控制静探车拔出本发明。
102.针对数据结果进行分析,根据图3中的volumetric water content可得到不同深度位置土壤的体积含水率,如10.4m深度位置体积含水率为34%。
103.根据图3中的electrical conductivity,若该场地为重金属铜污染场地,参考图4,即可对不同深度处的铜离子含量进行判断,如13.7m深度位置,电导率为212.1ms/m,cu
2+
含量约为324.9mg/kg。
104.根据图3中的325nm fluorescence,参考图5,即可对不同深度处的腐殖酸含量进行判断,如5.6m深度位置,325nm相对荧光强度为67.4%,腐殖酸含量约为100.9mg/kg。
105.根据图3中的280nm fluorescence,若该场地为柴油污染场地,参考图6,即可对不同深度处的柴油含量进行判断,如8.6m深度位置,280nm荧光强度为43%,柴油含量约为616.5mg/kg。
106.参考图3中的soil picture,比如图中12.5m深度的土壤图片,经过与中砂标准样的图片进行对比,可以认为该位置土层为中砂层。
107.图7显示了本发明所测到的tdr波形(p-b)与通常设备所测到的tdr波形(p-a),可以发现,由于现有技术的探针多根直探针朝下布置或探针缠绕式布置,而本发明却采用了内外的w形/m形的两根探针,通过弯折极大地减小了探针所占空间,波形所测到的δt2显著大于通常设备测到的δt1,增大了探针对周边土壤的敏感性,同时减小了对周边土体的扰动,消除了挤压效应,进而避免了测试过程中的数据失真。
108.综上所述,利用本发明对某一场地位置进行一次原位测试,即可获得不同深度位置的土壤介电常数、电导率、280nm紫外光照射下的荧光强度、325nm紫外光照射下的荧光强度、土壤图片,进而实现对相应位置体积含水率、离子型污染物浓度、多环芳烃浓度、腐殖酸
浓度、土壤类别的表征,实现了多元污染物的识别。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1