一种耐张线夹带电检测装置及其作业方法与流程
1.本发明涉及耐张线夹检测技术,具体涉及一种耐张线夹带电检测装置及其作业方法。
背景技术:
2.在21世纪的今天,处处可见超高压传输线路,超高压传输具有传输电压大,电流大等特点,能极大的减少传输时电能的损耗。其连接处的耐张线夹是传输中重要的一环,耐张线夹的好坏会直接影响到电能的传输,因此,耐张线夹的质量检测便显得至关重要。各个设计院对于耐张线夹的检测也逐渐开始重视,2020年,河南电科院提出使用dr装置检测耐张线夹,在其方法中,虽然能检测到耐张线夹的好坏,但由于耐张线夹大多处于高压线路传输中,每次检测都需要关闭电能传输,检测时方法繁琐,需要过多的作业人员,并且严重影响电能传输的质量,长时间的停电对于居民用电也产生大量的不便。2020年,山西电科院提出一种搭载于无人机的x射线无损检测装置,其装置利用无人机的飞行特点,能空中进行耐张线夹的检测,减少了关闭输电线路造成的能量损失,并且无需人工高空作业,避免了x射线对于人体的伤害。但是其装置由于其检测部分处于无人机下方,并且是全部基于螺栓固定,这种方式看似很好的检测出结果,但是由于作业都处于高空中,风力较地面更为严峻,容易在高空中左右摇摆,对检测结果产生较大的误差,如果不能稳定检测时的帧数,便不能准确的检测耐张线夹的实际情况。因此需要一种全新的耐张线夹带电检测装置及其作业方法。
技术实现要素:
3.本发明要解决的技术问题:针对现有技术的上述问题,提供一种耐张线夹带电检测装置及其作业方法,本发明具有高空作业更优良的准确性,从而弥补现在耐张线夹检测领域的不足,可有效降低耐张线夹dr检测的难度,提高耐张线夹dr检测的效率。
4.为了解决上述技术问题,本发明采用的技术方案为:
5.一种耐张线夹带电检测装置,包括相互连接的飞行器,所述飞行器的底部安装有悬挂支架,所述悬挂支架的一端安装有二维电控云台,所述二维电控云台上安装有dr发射装置,所述悬挂支架的另一端安装有电动关节和成像板,所述成像板通过电动关节与悬挂支架相连。
6.可选地,所述悬挂支架包括悬臂梁、第一机械臂和第二机械臂,所述悬臂梁顶端与飞行器相连、下端分别与第一机械臂和第二机械臂相连,所述二维电控云台安装在第一机械臂上,所述电动关节与第二机械臂相连。
7.可选地,所述飞行器的底部还设有固定底座,所述悬臂梁的顶端与固定底座相连。
8.可选地,所述电动关节与第二机械臂之间还设有遥控分离装置。
9.可选地,所述悬臂梁、第一机械臂和第二机械臂三者形成倒装的“y”字形结构。
10.可选地,所述二维电控云台包括级联连接的x轴滑轨机构和y轴滑轨机构,所述x轴滑轨机构和y轴滑轨机构均带有用于控制滑动距离的舵机,所述x轴滑轨机构和y轴滑轨机
构两者中一者通过其滑块与悬挂支架相连、另一者通过其滑块与dr发射装置相连。
11.可选地,所述二维电控云台上还安装有深度相机。
12.可选地,所述飞行器为旋翼无人机。
13.可选地,还包括带有无线通讯功能的地面控制终端,所述飞行器、dr发射装置、电动关节、成像板、遥控分离装置以及深度相机均与所述地面控制终端相连。
14.此外,本发明还提供一种前述耐张线夹带电检测装置的作业方法,包括:1)控制飞行器飞行到被检测耐张线夹所在的目标地点;2)通过控制飞行器的位置,使得飞行器位于被检测耐张线夹的正上方,结合调节二维电控云台和电动关节,使得被检测耐张线夹位于dr发射装置、成像板两者之间;3)通过深度相机获取被检测耐张线夹的深度信息图像,基于深度信息图像获取被检测耐张线夹的法线方向,结合调节二维电控云台和电动关节,使得dr发射装置、成像板两者与法线方向重合,从而使得dr发射装置、被检测耐张线夹、成像板三者的中点位于一条直线上;4)控制dr发射装置发射x射线,并采集成像板的成像图像,从而获得被检测耐张线夹的dr检测图像。
15.和现有技术相比,本发明具有下述优点:目前所有的检测技术中,通过dr检测方法进行耐张线夹检测,然后由现场的工作人员进行分析,需要对高压线路进行断电处理,严重的影响了居民的正常用电,对城市建设造成一些无法避免的损失,有些通过无人机底部装载检测装置,简单的挂钩式检测易受高空气流影响,检测时发射源与耐张线夹无法维持相对稳定,严重影响了检测的准确性。本发明包括相互连接的飞行器,飞行器的底部安装有悬挂支架,悬挂支架的一端安装有二维电控云台,二维电控云台上安装有dr发射装置,悬挂支架的另一端安装有电动关节和成像板,成像板通过电动关节与悬挂支架相连。本发明通过无人机的方式进行高空远距离检测,其次是采用了二维电控云台来控制dr发射装置,使其能够在高空中风力较大时维持稳定,机械臂右侧关节放置成像板,也同时进行调整,极大的提高了检测的准确性。本发明具有高空作业更优良的准确性,从而弥补现在耐张线夹检测技术的不足,可有效降低耐张线夹dr检测的难度,提高耐张线夹dr检测的效率。
附图说明
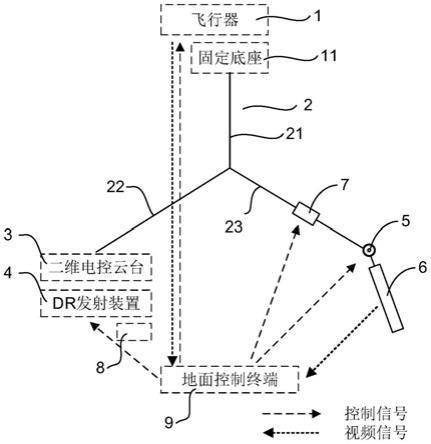
16.图1为本发明实施例耐张线夹带电检测装置的结构示意图。
17.图2为本发明实施例作业方法的流程示意图。
18.图例说明:1、飞行器;11、固定底座;2、悬挂支架;21、悬臂梁;22、第一机械臂;23、第二机械臂;3、二维电控云台;4、dr发射装置;5、电动关节;6、成像板;7、遥控分离装置;8、深度相机;9、地面控制终端。
具体实施方式
19.下面结合实施例对本发明作进一步说明。显然,所描述的实施例只是本发明的一部分实施案例,不是全部的实施例。本领域的普通技术人员在没有做出创作性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.如图1所示,本实施例提供一种耐张线夹带电检测装置,包括相互连接的飞行器1,飞行器1的底部安装有悬挂支架2,悬挂支架2的一端安装有二维电控云台3,二维电控云台3上安装有dr发射装置4,悬挂支架2的另一端安装有电动关节5和成像板6,成像板6通过电动
关节5与悬挂支架2相连。
21.飞行器1是本实施例中耐张线夹带电检测装置的承载机构,可采用各类具有悬停功能的飞行器,包括无人机、飞艇、热气球等。本实施例中,飞行器1为旋翼无人机,具有机动性好、承载力强、结构小巧灵活的优点,具体采用六旋翼无人机,承载质量为20公斤,飞行时长为30分钟左右。
22.如图1所示,本实施例中悬挂支架2包括悬臂梁21、第一机械臂22和第二机械臂23,悬臂梁21顶端与飞行器1相连、下端分别与第一机械臂22和第二机械臂23相连,二维电控云台3安装在第一机械臂22上,电动关节5与第二机械臂23相连。通过上述结构,可方便地实现第一机械臂22和第二机械臂23两者的单独调整或配合调整。本实施例中,第一机械臂22和第二机械臂23可以根据需要采用固定臂,此外也可以采用现有多段式的机械臂。为了便于安装和拆卸,如图1所示,飞行器1的底部还设有固定底座11,悬臂梁21的顶端与固定底座11相连。
23.电动关节5与第二机械臂23之间还设有遥控分离装置7。遥控分离装置7具体包括通过已转轴相连的连接杆,两个连接杆之间设有直线电机,且直线电机连接有遥控模块,当设备处于极限情况时,下方的工作人员可以通过一键脱离使得遥控分离装置7的直线电机进行分离,保障线路以及作业人员的安全。
24.悬臂梁21、第一机械臂22和第二机械臂23三者形成倒装的“y”字形结构。第一机械臂22末端有多个螺孔,通过螺栓的形式固定连接二维电控云台3。第二机械臂23末端有多个螺孔,通过螺栓的形式固定连接电动关节5,电动关节5可旋转270度。电动关节5右侧连接一成像板,其中成像板6与电动关节5为机械式焊接,可通过控制关节角度5变化来实现控制成像板6的位置变化,当dr发射装置4处于目标位置时,控制电动关节5旋转,随即成像板6也跟着旋转,不断的控制二维电控云台3与电动关节5,当其处于左侧二维电控云台3以及dr发射装置4、中间耐张线夹,右侧的成像板6三个中心重合时,即可开启dr发射装置4进行目标检测。
25.二维电控云台3包括级联连接的x轴滑轨机构和y轴滑轨机构,x轴滑轨机构和y轴滑轨机构均带有用于控制滑动距离的舵机,x轴滑轨机构和y轴滑轨机构两者中一者通过其滑块与悬挂支架2相连、另一者通过其滑块与dr发射装置4相连。x轴滑轨机构和y轴滑轨机构两者的滑块以及附属的安装支架均采用高强度碳纤维材料,设计为两自由度结构,采用180
°
大转矩舵机和高强度轴承,通过stm32单片机控制舵机旋转,最小控制角度为0.9
°
。
26.为了便于对被检测耐张线夹的精确检测,如图1所示,本实施例中二维电控云台3上还安装有深度相机8。二维电控云台3正右侧上方设有多个螺孔,深度相机8通过螺栓与二维电控云台3相连接,使得深度相机8与dr发射装置4呈同一角度,与dr发射装置4发射方向一致且与dr发射装置4一起运动。二维电控云台3正右侧上方设有多个螺孔,并用螺栓的形式连接深度相机8,深度相机8与二维电控云台3呈同一角度,在检测过程中,通过地面上位机观测到的深度相机8的实时数据来判断是否到达正确的检测方位,当上位机观测到处于正确方位时,开启dr发射装置4进行目标检测。
27.如图1所示,本实施例还包括带有无线通讯功能的地面控制终端9,飞行器1、dr发射装置4、电动关节5、成像板6、遥控分离装置7以及深度相机8均与地面控制终端9相连(可根据需要采用有线或无线的连接方式)。为了使得作业人员方便检测,dr发射装置4为无线
遥控,当无人机悬停到指定位置时,作业人员通过手柄遥控开启dr发射装置4,然后通过检测成像板6实施传输过来的数据进行耐张线夹内部情况的判断。
28.本实施例中,二维电控云台3上下方分别设有多个螺孔,无人机下方的固定装置与二维电控云台3通过螺栓连接,其中二维电控云台3通过无线的方式由地面控制终端9控制,通过改变二维电控云台3上x轴滑轨机构和y轴滑轨机构的两个舵机的角度从而实现对控制dr发射装置4的角度控制,二维电控云台3下方的dr发射装置4与二维电控云台3通过螺栓进行连接可使其保持方向一致。
29.如图2所示,本实施例还提供一种前述耐张线夹带电检测装置的作业方法,包括:
30.1)控制飞行器1飞行到被检测耐张线夹所在的目标地点;作业人员控制无人机飞行到指定位置,通过地面上位机中无人机反馈的地理坐标和高度信息,控制无人机飞到耐张线夹正上方,主要判断依据为无人机的反馈以及飞手的经验。
31.2)通过控制飞行器1的位置,使得飞行器1位于被检测耐张线夹的正上方,结合调节二维电控云台3和电动关节5,使得被检测耐张线夹位于dr发射装置4、成像板6两者之间;
32.3)通过深度相机8获取被检测耐张线夹的深度信息图像,基于深度信息图像获取被检测耐张线夹的法线方向,结合调节二维电控云台3和电动关节5,使得dr发射装置4、成像板6两者与法线方向重合,从而使得dr发射装置4、被检测耐张线夹、成像板6三者的中点位于一条直线上;
33.4)控制dr发射装置4发射x射线,并采集成像板6的成像速度,从而获得被检测耐张线夹的dr检测图像。获得dr检测图像以后,即可对耐张线夹的状态进行判断。
34.本实施例中步骤3)为地面控制终端9通过无线的方式加载深度相机传回的信息,并且自动检测耐张线夹的位置,其中自动检测由jeston nano完成,包括检测耐张线夹位置以及检测成像板位置。基于深度信息图像获取被检测耐张线夹的法线方向时,包括首先检测获得检测耐张线夹靠近dr发射装置4一侧深度信息最小的侧边作为基准线,然后获取该基准线的法线方向得到被检测耐张线夹的法线方向,需要说明的是,获取深度图像的法线方向为现有算法,本实施例中仅仅为对该方法的应用,并不涉及对该方法的改进。然后结合调节二维电控云台3和电动关节5,使得dr发射装置4、成像板6两者与法线方向重合,从而使得dr发射装置4、被检测耐张线夹、成像板6三者的中点位于一条直线上。最后地面控制终端9遥控开启dr发射装置4发射x光,x光透过耐张线夹投射到成像板6上,地面控制终端9通过判断成像板信息即可得到高空中耐张线夹的具体情况。本实施例耐张线夹带电检测装置的作业方法一方面为前述耐张线夹带电检测装置的应用,具有高空作业更优良的准确性,从而弥补现在耐张线夹检测领域的不足,可有效降低耐张线夹dr检测的难度,提高耐张线夹dr检测的效率。另一方面,通过深度相机8获取被检测耐张线夹的深度信息图像,基于深度信息图像获取被检测耐张线夹的法线方向,结合调节二维电控云台3和电动关节5,使得dr发射装置4、成像板6两者与法线方向重合,从而使得dr发射装置4、被检测耐张线夹、成像板6三者的中点位于一条直线上,可有效实现对被检测耐张线夹的方位控制,从而可获得更加青雀的dr检测图像,有利于提高耐张线夹的检测准确度。
35.综上所述,本实施例通过无人机搭载机械臂的形式对耐张线夹进行检测,能充分保障检测时线路以及工作人员的安全性,并且机械臂可自由调节,在高空中面对较大的风力也能进行自我调节,不会出现图像模糊无法检测的情况,具有很强的实用性。
36.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1