增强融合定位模组及增强融合定位装置的制作方法
1.本技术涉及卫星导航定位技术领域,尤其涉及一种增强融合定位模组及装置。
背景技术:
2.融合定位是将多种定位技术根据特性和应用需要进行组合,通过特定的算法将多种定位数据进行融合,实现相互促进从而提升定位性能和效果。针对一些特殊应用场合,一种定位方式不能满足需要时,需要采用融合定位,比如无人机的精确定位导航应用。日常应用中的很多定位场景,也常采用融合定位方式,如手机定位常采用gps+wifi+imu等技术融合实现。
3.目前,不同厂商在应用融合定位技术时,都需要进行单独设计,使产品的研发周期较长。
技术实现要素:
4.本技术实施例通过提供一种增强融合定位模组及装置,解决了不同厂商在应用融合定位技术时,都需要进行单独设计,使产品的研发周期较长的技术问题。
5.第一这方面,本技术实施例提供了一种增强融合定位模组,该增强融合定位模组包括第一微处理器、导航芯片和惯性传感器;所述惯性传感器与所述导航芯片连接,被配置为向所述导航芯片传输惯导数据;所述导航芯片与所述第一微处理器连接,被配置为接收经过射频链路处理后的卫星导航信号并进行pvt解算,将星历数据、原始观测值、sbas增强电文、惯导数据、gnss数据和gnss/imu组合数据传输至所述第一微处理器;所述第一微处理器用于与数据传输模组,被配置为接收所述导航芯片传输来的星历数据、原始观测值、sbas增强电文、惯导数据、gnss数据和gnss/imu组合数据,或接收所述数据传输模组发送来的sbas增强电文,并进行gnss定位、sbas定位和gnss/imu组合定位算法处理,并将处理得到的定位、测速和授时数据向外传输或传输至所述数据传输模组。
6.结合第一方面,在一种可能的实现方式中,所述增强融合定位模组包括多个所述导航芯片,所述导航芯片还被配置为进行rtk定位解算并将rtk定位数据传输至所述第一微处理器;所述第一微处理器被配置为根据所述导航芯片传输来的数据进行gnss定位、sbas定位、ppp-rtk定位和gnss/imu组合定位算法处理。
7.结合第一方面,在一种可能的实现方式中,所述第一微处理器还被配置为接收所述数据传输模组传输来的rtk增强数据和ppp电文,并根据所述数据传输模组传输来的数据进行gnss定位、sbas定位、ppp-rtk定位和gnss/imu组合定位算法处理。
8.结合第一方面,在一种可能的实现方式中,所述增强融合定位模组还包括导航天线检测电路,所述导航天线检测电路连接于所述导航芯片。
9.结合第一方面,在一种可能的实现方式中,所述增强融合定位模组还包括温补晶振,所述第一微处理器和/或所述导航芯片连接有所述温补晶振。
10.结合第一方面,在一种可能的实现方式中,当所述导航芯片连接有所述温补晶振
时,所述导航芯片与所述晶振之间设置有缓冲寄存器。
11.结合第一方面,在一种可能的实现方式中,所述增强融合定位模组还包括滤波电路,所述滤波电路连接于直流电源入口处,所述滤波电路包括三个并联设置的滤波电容,分别用于过滤电源线上的低频、中频和高频脉冲。
12.结合第一方面,在一种可能的实现方式中,所述增强融合定位模组包括主电源引脚和备用电源引脚;关闭除所述备用电源引脚外的其他电源时,所述增强融合定位模组维持rtc时钟和备份ram,电源恢复后,导航程序可从备份ram恢复。
13.结合第一方面,在一种可能的实现方式中,所述增强融合定位模组还包括上盖、壳体和侧面盖板;所述上盖与所述壳体之间,以及所述侧面盖板与所述壳体之间均设置有密封圈。
14.第二方面,本技术实施例提供了一种增强融合定位装置,该增强融合定位装置包括第二微处理器、数据传输模组、tf卡座、电源转换电路以及第一方面和第一方面任一种可能的实现方式所述的增强融合定位模组;所述第二微处理器与所述增强融合定位模组连接;所述数据传输模组、所述电源转换电路和所述tf卡座均连接于所述第二微处理器连接,所述电源转换电路还与所述第一微处理器连接。
15.本发明实施例中提供的一个或多个技术方案,至少具有如下技术效果:
16.本发明实施例提供了一种增强融合定位模组,该增强融合定位模组包括第一微处理器、导航芯片和惯性传感器;惯性传感器与导航芯片连接,被配置为向导航芯片传输惯导数据;导航芯片与第一微处理器连接,被配置为接收经过射频链路处理后的卫星导航信号并进行pvt解算,将星历数据、原始观测值、sbas增强电文、惯导数据、gnss数据和gnss/imu组合数据传输至第一微处理器;第一微处理器用于与数据传输模组30,被配置为接收导航芯片传输来的星历数据、原始观测值、sbas增强电文、惯导数据、gnss数据和gnss/imu组合数据,或接收数据传输模组30发送来的sbas增强电文,并进行gnss定位、sbas定位和gnss/imu组合定位算法处理,并将处理得到的定位、测速和授时数据向外传输或传输至数据传输模组30。本发明实施例提供的增强融合定位模组实现了融合定位技术的模块化,不同厂商在应用融合定位技术时,可以直接使用该增强融合定位模组,不需要进行单独设计,缩短了产品的研发周期。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对本发明实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
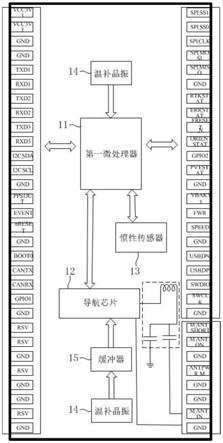
18.图1为本技术实施例提供的增强融合定位模组的一种系统架构图;
19.图2为本技术实施例提供的增强融合定位模组的另一种系统架构图;
20.图3为图1所示的增强融合定位模组的数据流程图;
21.图4为图2所示的增强融合定位模组的数据流程图;
22.图5为本技术实施例提供的增强融合定位装置的系统架构图;
23.图6为图5所述的增强融合定位装置的数据流程图。
24.附图标记:10-增强融合定位模组;11-第一微处理器;12-导航芯片;13-惯性传感器;14-温补晶振;15-缓冲寄存器;16-滤波电路;20-第二微处理器;30-数据传输模组;40-tf卡座;50-电源转换电路。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.在本发明实施例的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明实施例中的具体含义。
27.本技术实施例提供了一种增强融合定位模组10,请一并参照说明书附图中的图1至图4。其中,图1和图2分别未出了增强融合定位模组10的两种系统架构图,图3为图1所示的增强融合定位模组10的数据流程图;图4为图2所示的增强融合定位模组10的数据流程图。
28.首先,对本发明实施例中可能使用到的英文缩写进行释义。北斗卫星导航系统(英文:beidou navigation satellite system,简称:bds)、全球定位系统(英文:global positioning system,简称:gps)、伽利略卫星导航系统(英文:galileo)、格洛纳斯全球卫星导航系统(英文:global navigation satellite system,简称:glonass)、双频多星座(英文:dual frequency multi constellation,简称:dfmc)、高轨道卫星(英文:geostationary orbit,简称:geo)、全球导航卫星系统(英文:global navigation satellite system,简称:gnss)、秒脉冲(英文:pulse per second,简称:pps)、准天顶卫星系统(英文:quasi-zenith satellite system、简称:qzss)、国际海运事业无线电技术委员会(英文:radiotechnical commission for maritime,简称:rtcm)、载波相位差分技术(英文:real-time kinematic,简称:rtk)、星基增强系统(英文:satellite-based augmentation system,简称:rtk)、运营商vlan传输技术(英文:provider vlan transport,简称:pvt)、虚拟局域网(英文:virtual local area network,简称:vlan)、惯性测量单元(英文:inertial measurement unit,简称:imu)、点对点协议(英文:point to point protocol,简称:ppp)、随机存取存储器(英语:random access memory,简称:ram)。
29.该增强融合定位模组10包括第一微处理器11、导航芯片12和惯性传感器13。惯性传感器13与导航芯片12连接,被配置为向导航芯片12传输惯导数据。导航芯片12与第一微处理器11连接,被配置为接收经过射频链路处理后的卫星导航信号并进行pvt解算,将星历
数据、原始观测值、sbas增强电文、惯导数据、gnss数据和gnss/imu组合数据传输至第一微处理器11。第一微处理器11用于与数据传输模组30,被配置为接收导航芯片12传输来的星历数据、原始观测值、sbas增强电文、惯导数据、gnss数据和gnss/imu组合数据,或接收数据传输模组30发送来的sbas增强电文,并进行gnss定位、sbas定位和gnss/imu组合定位算法处理,并将处理得到的定位、测速和授时数据向外传输或传输至数据传输模组30,使该增强融合定位模组10能够支持gnss和sbas定位、测速和授时功能,以及gnss/imu组合导航定位功能。
30.第一微处理器11可以采用stm32h743型号的芯片,stm32h743i是高性能工作频率400mhz的32位arm-m7mcu,具有浮点单元(fpu),支持双精度(ieee754兼容)和单精度数据处理指令和数据类型。
31.其中,数据传输模组30可以是4g模组,4g模组具体型号可以为sim7600ce,sim7600ce模组是多频段lte-tdd/lte-fdd/hspa+/td-scdma/evdo和双gsm/gprs/edge/smt类型的模块解决方案,支持lte-cat4,下行数据传输速率高达150mbps。此外,它具有很强的扩展能力,接口丰富,包括uart、usb2.0、spi、i2c、gpio等,并且提供了tcp/udp/ftp/ftps/http/https/smtp/pop3和mms等应用功能。当然,数据传输模组30还可以是3g模组、5g模组等能够进行蜂窝数据传输的模组。
32.导航芯片12支持bds、gps、galileo、glonass、sbas、qzss多系多频点信号接收。具体地,可以采用hd9310型号芯片,该芯片是支持多系统多频点的soc芯片,同时也是支持北斗三号信号体制的导航定位芯片,具备支持全球所有gnss卫星定位系统和所有频点信号的能力,芯片内部集成基于arm cotexm4的浮点运算单元,160kb ram,32kb备用ram(备电vbat),内嵌386kb flash,接口类型包括uart,i2c,spi,gpio和can。
33.惯性传感器13可以采用smi230型号的芯片,该芯片是微小型高精度三轴加计,三轴惯导,内嵌温补晶振14的惯导芯片。
34.图2所示的增强融合定位模组10包括多个导航芯片12,导航芯片12还被配置为进行rtk定位解算并将rtk定位数据传输至第一微处理器11。第一微处理器11被配置为接收数据传输模组30传输来的ppp电文,然后根据导航芯片12和数据传输模组30传输来的数据进行gnss定位、sbas定位、ppp-rtk定位和gnss/imu组合定位算法处理,进而使图2所示的增强融合定位模组10除了能够支持gnss和sbas定位、测速和授时功能,以及gnss/imu组合导航定位功能外,还能够支持rtk和ppp-rtk定位、测速和授时功能。
35.此外,在图2所示的增强融合定位模组10中,rtk增强数据和ppp电文还可以由数据传输模组30传输来。即,第一微处理器11还被配置为接收数据传输模组30传输来的rtk增强数据和ppp电文,并根据数据传输模组30传输来的数据进行gnss定位、sbas定位、ppp-rtk定位和gnss/imu组合定位算法处理。
36.进一步地,该增强融合定位模组10还包括导航天线检测电路(图中未示出),导航天线检测电路连接于第一微处理器11,导航天线通过图1和图2中示出的m_ant_on引脚和m_ant_short引脚连接于导航天线检测电路。m_ant_on引脚和m_ant_short引脚可检测导航天线的开路、短路及正常三种工作状态,用户可从nema数据来判断具体状态。m_ant_short引脚还具有导航天线短路保护功能。若检测到m_ant_short引脚有大于预计值的电流,比如预计值为55ma,该增强融合定位模组10将自动对电流输出进行限流,进而达到保护作用。
37.继续参照图1和图2所示,本发明实施例提供的增强融合定位模组10还包括温补晶振14,第一微处理器11和/或导航芯片12连接有温补晶振14。图1和图2中所示的增强融合定位模组10中,第一微处理器11和导航芯片12均连接有温补晶振14。当然,也可以只有第一微处理器11或导航芯片12连接有温补晶振14。
38.具体地,温补晶振14的规格可以采用sit5356,sit5356是一种1-60mhz输出的高精度、低功耗、芯片级、可编程的温度补偿型振荡器,可提供0.1ppb/g振动免疫力,不会产生频率扰动或微跳变。
39.当导航芯片12连接有温补晶振14时,导航芯片12与晶振之间设置有缓冲寄存器15,用以暂时存放导航芯片12向外输送的数据。
40.具体地,本发明实施例提供的增强融合定位模组10包括主电源引脚和备用电源引脚。关闭除备用电源引脚外的其他电源时,增强融合定位模组10维持rtc时钟和备份ram,电源恢复后,导航程序可从备份ram恢复。
41.图1和图2所示的增强融合定位模组10中,主电源引脚为vcc_3v3,备用电源引脚为vbak33。
42.增强融合定位模组10配有两个独立的电源:主电源和备用电源。增强融合定位模组10处于系统备份模式时,针对超低功耗的应用场景,可断开主电,进一步降低功耗。
43.系统初始化上电时序如下:主电源和备用电源首次上电时,须拉低外部复位。主电源和备用电源均达到最小工作电压后,保持外部复位拉低状态至少5ms。
44.主电源上/下电时序如下:在主电源断开的情况下,为保存备份数据,需保持备用电源通电,并遵循以下规则:主电源断开时,应释放对外部复位的控制,prrstx会因内部上拉而保持高电平;主电源恢复上电时,应提前10ms将外部复位拉低并保持至主电源恢复完毕至少5ms后。
45.进一步的,本发明实施例提供的增强融合定位模组10还包括上盖、壳体和侧面盖板。上盖与壳体之间,以及侧面盖板与壳体之间均设置有密封圈,使增强融合定位模组10的内部和外部隔离,能够防水、防潮和防尘。
46.壳体采用高导电率的铝合金材料制成,并经导电氧化处理,使其能够长期保持良好的导电性能。壳体与盖板之间的接触面要平整,采用紧固螺钉压紧,形成可靠的电气搭接。
47.本发明实施例提供的增强融合定位模组10的环境适应性依据国家标准相关章节等级要求进行设计,包括:在元器件选用时要选择质量等级工业级以上的元器件;所有电路板均进行三防处理;线缆选型、pcb板板材及元器件的均选用满足阻燃要求;连接器选型按照振动试验要求选择满足工业标准的连接器;电源滤波、浪涌抑制器件参数均满足电源输入、电磁试验要求;接口防雷器件参数满足感应雷击相关实验要求;从密封性、材料的选用、表面镀涂三个方面考虑,对于钢结构件采用镀铜处理,铝构件采用导电氧化处理,所有设备外表均采取镀锌或氧化后进行喷漆处理;多芯电缆插头导线多、焊点密集,电装完成后难以清洗干净助焊剂,极易受到环境影响,发生腐蚀、短路现象,因此,采用硅橡胶密封电缆尾部,并在电装时采用热缩套管封装;对于普通印制电路板,采用涂覆三防涂料进行防护;对于高频、中频印制电路板,为防止三防涂料的涂覆可能引起其电路参数和特性改变,将其密封在屏蔽盒中进行防护,屏蔽盒外表面再喷涂三防漆进行防护;装配钢制结构件上的螺孔,
将螺钉带密封胶拧入;配打的定位销外露部分进行涂漆或密封胶保护。
48.在进行硬件设计和软件设计时,确保人身安全和设备安全,避免把检测点设置在高压、高温和运动等不安全的部位;电气性能设计中充分考虑对人员安全性的要求,具有防触电措施;在进行电路设计时,必须保证模块与机壳良好的接地。有良好的接地,同时在满足整机外形尺寸的前提下尽可能缩小由于各功能模块的安装表面采用导电氧化处理和正确的选择印制电路板接地。保证整机在模块安装、设备使用和维修时是不发生危险,达到安全性设计要求。要求产品在结构设计上充分考虑贮存、运输中的倾覆、防撞、防燃等措施;在使用手册中注明,在设备需要检查维修时要断电,确保人员安全。
49.本发明实施例提供的增强融合定位模组10中的电源线和控制线是电磁干扰出入电路的主要途径,连接器用的emi磁片,表面贴装emi元件,用于抑制信号线、电源线上的噪声和尖峰干扰。
50.本发明实施例提供的增强融合定位模组10还包括滤波电路,滤波电路连接于直流电源入口处,滤波电路包括三个并联设置的滤波电容,分别用于过滤电源线上的低频、中频和高频脉冲。三个并联设置滤波电容可以设置成相差预设倍数,比如100倍,使三个并联设置的滤波电容能够分别过滤掉电源线上的低频、中频和高频脉冲。
51.该增强融合定位模组10中的pcb采用大面积接地,底面为接地面,接地平面镀金,导电良好,可降低地线阻抗,降低趋肤效应的影响。使用紧固螺钉将pcb与壳体紧密结合。表面贴器件和滤波电容接地时,每个焊盘有两根花盘脚接铺地铜皮,减小器件接地电感。
52.指示灯窗口采用有机透光复合屏蔽材料进行屏蔽。为了防止印制板模块内部各级之间的相互干扰,对内部各级也必须进行屏蔽隔离处理。
53.本发明实施例提供的增强融合定位模组10的可靠性预计采用应力法,计算公式如下:
54.其中,λs表示系统的总失效率,单位为10-6
/h;λi表示系统第i个组成设备的失效率,单位为10-6
/h。
55.可靠性预计优先采用供应商提供的mtbf/mttf报告、外场统计数据和数据手册中的可靠性数据。可靠性预计采用元器件计数法,国产器件(包括pcb单元、焊点)按gjb299c《电子设备可靠性预计手册》进行预计,进口元器件按mil-hdbk-217f noticeⅱ《电子设备可靠性预计手册》进行预计。
56.图1和图2所示的增强融合定位模组10中,各引脚的含义对照以下表格。
57.58.[0059][0060]
本技术实施例还提供了一种增强融合定位装置,如图5所示,该增强融合定位装置包括第二微处理器20、数据传输模组30、tf卡座40、电源转换电路50以及本发明实施例提供的增强融合定位模组10。第二微处理器20与增强融合定位模组10连接;数据传输模组30、电源转换电路50和tf卡座40均连接于第二微处理器20连接,电源转换电路50还与第一微处理器11连接。
[0061]
第二微处理器20可以采用型号为stm32f429vit6的芯片。stm32f429vit6基于高性能armrcortexr-m4 32位risc内核,工作频率高达180mhz。cortex-m4core具有单精度浮点单元,支持所有arms单精度数据处理指令和数据类型,还实现了一整套dsp指令和一个内存
保护单元,以增强应用程序的安全性,包含高速嵌入式处理器内存,高达4kb的备份sram,以及连接到两条apb总线、两条ahb总线和一个32位多ahb总线矩阵的各种增强型los和外围设备。
[0062]
如图5,外部电源经电源转换电路50进行电压转换并利用ldo稳压处理,为第二微处理器20和增强融合定位模组10供电。同时gnss天线接收gnss信号,4g天线接收4g信号,经过射频链路处理后,将原始观测数据送至增强融合定位模组10进行算法处理,处理后将精准定位数据经串口传至第二微处理器20进一步处理并通过以太网、usb、4g模块对外输出。
[0063]
本说明书中的各个实施方式采用递进的方式描述,各个实施方式之间相同或相似的部分互相参见即可,每个实施方式重点说明的都是与其他实施方式的不同之处。
[0064]
以上实施例仅用以说明本技术的技术方案,而非对本技术限制;尽管参照前述实施例对本技术进行了详细的说明,本领域普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1