基于近红外光谱和对比学习的烟叶部位判别方法及装置与流程
1.本发明属于近红外无损检测技术领域,具体涉及一种基于近红外光谱和对比学习的烟叶部位判别方法及装置。
背景技术:
2.烟草是我国重要的经济作物之一,在国内乃至全世界范围均被广泛种植,烟草的发展一直是我国农业行业的关注重点。烟草行业的发展在很大程度上是由于烟叶品质决定的。烟叶品质包含烟叶的外观质量、感官质量、化学成分、物理特性和安全性等方面,它们从不同的方面反映烟叶品质特征。不同的烟叶部位因其所受的光照程度、湿度等环境的不同而具有不同的物理性质和化学成分。烟叶部位的差异会导致品质的巨大差异,因此,烟叶品质的衡量标准之一是烟叶的部位。
3.目前我国对于烟叶部位和烟叶质量的评定主要通过化性分析、感官分析和基于图像的外观分析等进行综合评定,需要花费大量的时间和精力,无法满足在线识别烟叶部位的需求,难以对整个加工环节进行控制。近红外光谱分析技术具有快速、准确和无接触等优点,在农业、食品、石油等领域特别是烟草行业的应用日益广泛,已有研究者利用近红外光谱用于烟叶品质判断,但目前主要用于烟叶化学成分分析和产地识别,鲜有利用近红外光谱直接进行烟叶部位判断的公开报道。不同产地不同部位烟叶的近红外光谱谱峰重叠严重、内部特征信息复杂,因此不同部位烟叶的光谱数据差异特征的提取是利用近红外光谱数据进行烟叶部位判定的关键,对比学习是几年发展起来的一种强大的特征提取方法,可以挖掘光谱数据内部不显著的特征信息,建立烟叶部位和光谱特征的复杂映射关系,有效提高分类精度。
技术实现要素:
4.针对现有技术中存在的问题,本发明的目的是提供一种基于近红外光谱和对比学习的烟叶部位判别方法及装置,实现对不同产地烟叶部位的智能识别,为烟叶品质判定提供依据,为及时发现问题,提高产品质量提供保障。
5.为实现上述目的,本发明提供了如下技术方案:
6.(1)样本制作:提供k个烟叶样品,在近红外光谱仪上采集其样本光谱数据vi(i=1,2,...,n),并标记样品部位信息,上部记作u,中部记作c,下部记作d;
7.(2)样本数据维扩展:提取样本vi的光谱特征参量,将所述光谱特征参量归一化后与原样本光谱数据vi拼接得到扩展的样本矢量(i=1,2,...,n);所述样本矢量的行列维度为1
×
m;
8.(3)对比学习网络构建和训练:包括如下步骤:
9.(3-1)输入数据格式转换和数据集划分:将样本矢量经过转换函数转换为适合对比学习网络的数据ii,i=1,2,
…
,n;将所述转换后的数据集{ii}(i=1,2,
…
,n)按
比例随机划分为校正集(训练集、验证集)和测试集;
10.(3-2)网络构建:选取一种对比学习模型,构建三个对比学习网络:u/cd对比学习网络、c\ud对比学习网络和d\uc对比学习网络;
11.(3-3)网络训练:对每个对比学习网络构建相应的正负样本集并训练网络,直到验证集损失函数值小于训练集损失函数值且在训练次数内验证集损失值最小;
12.(4)分类网络构建和训练:
13.利用步骤(3)中的u/cd对比学习网络、c\ud对比学习网络和d\uc对比学习网络的训练结果,构建分类网络并训练,输出烟叶样本部位识别概率矢量pi=[ui,ci,di](i=1,2,...,n);ui,ci,di分别表示第i个烟叶样本被识别为上部烟、中部烟、下部烟的概率;
[0014]
(5)烟叶部位判别:
[0015]
对每个样本,基于烟叶样本部位识别概率矢量pi=[ui,ci,di],实现烟叶部位判别。
[0016]
优选的,所述烟叶部位判别方法包括完全确定法和不完全确定法。
[0017]
优选的,步骤(2)所述光谱特征参量包括光谱斜率和坡向、光谱二值编码、一阶微分光谱和二阶微分光谱等。
[0018]
所述一阶微分光谱计算公式为
[0019][0020]
所述二阶微分光谱计算公式为
[0021][0022]
其中v
ij
为vi的第j个元素,为的第j个元素,l为光谱波段数;
[0023]
优选的,步骤(3)所述的转换函数的具体实现为:将1
×
m的样本矢量重排为m1×
m2的矩阵,将矩阵复制3次,重叠得到m1×
m2×
3的多维矩阵ii;m1×
m2=m
[0024]
优选的,步骤(3)所述构建相应的正负样本集训练网络具体为:
[0025]
所述u/cd对比学习网络以校正集中的上部烟为正样本,其他样本为负样本进行训练;所述c/ud对比学习网络以校正集中的中部烟为正样本,其他样本为负样本进行训练;所述d/uc对比学习网络以校正集中的下部烟为正样本,其他样本为负样本进行训练。
[0026]
优选的,步骤(3)所述对比学习模型包括:
[0027]
moco(momentum contrast)、simclr(a simple framework for contrastive learning of visual representations)和cpc(contrastive predictive coding)。
[0028]
优选的,步骤(3)中所述对比学习的损失函数定义为:
[0029][0030]
其中n代表样本数量,x代表样本集,x代表x中的一个样本数据,x
+
代表和x类似的样本,x-代表和x不类似的样本,f(.)代表映射操作。s(.)代表相似性度量函数。e(.)代表求期望操作。
[0031]
优选的,所述相似性度量函数包括光谱角距离、欧氏距离和信息散度等。
[0032]
优选的,步骤(4)所述分类网络选用对比学习网络迁移学习的深度神经网络,所述分类网络可以选用任一种二分类网络,包含:自编码器、深度神经网络和类别判别器。
[0033]
进一步地,步骤(5)所述的烟叶部位判别采用完全确定法,具体判别规则为:
[0034][0035]
其中yi表示第i个样本的部位;
[0036]
进一步地,步骤(5)所述的烟叶部位判别采用不完全确定法,具体判别步骤包括:
[0037]
(5-1)计算烟叶部位识别的归化矢量qi,i=1,2,
…
,n
[0038][0039][0040]
所述p
1i
=ui,p
2i
=ci,p
3i
=di,q
ij
为归化矢量qi的第j列元素。
[0041]
(5-2)根据归化矢量的值判断烟叶部位为确定性部位或过渡性部位。所述的烟叶的确定性部位包括u(上部)、c(中部)和d(下部);所述的烟叶的过渡性部位包括uc(上部和中部)和cd(中部和下部)。
[0042]
所述的根据归化矢量的值判断烟叶部位为确定性部位或过渡性部位,具体方法为:
[0043][0044]
其中yi表示第i个样本的部位。
[0045]
如图2所示,本发明还提供了一种基于近红外光谱和对比学习的烟叶部位判别装置,所述装置包括样本数据维扩展模块、对比学习网络构建和训练模块、分类模块和烟叶部位判别模块。
[0046]
所述样本数据维扩展模块,用于提取样本的光谱特征参量,并与原样本合并实现样本维数的扩展;
[0047]
所述对比学习网络构建和训练模块,用于构建并训练对比学习网络,为分类网络提供稳定的参数;
[0048]
所述分类模块,用于输出烟叶样本属于上部烟、中部烟和下部烟的概率;
[0049]
所述的烟叶部位判别模块,用于根据分类器输出结果,判别烟叶样本的部位。
[0050]
进一步地,所述基于近红外光谱和对比学习的烟叶部位判别装置还包括应用模块,所述应用模块使用烟叶部位判别结果计算成批烟叶的合格率,实现烟叶品质评价。
[0051]
进一步地,所述的对比学习网络构建和训练模块具体步骤包括:
[0052]
(1)输入数据格式转换和数据集划分:将数据维扩展后的样本矢量经过转换函数转换为适合对比学习网络的数据ii,i=1,2,
…
,n;将所述转换后的数据集{ii}(i=1,2,
…
,n)按比例随机划分为校正集(训练集、验证集)和测试集;
[0053]
(2)网络构建:选取一种对比学习模型,构建三个对比学习网络:u/cd对比学习网络、c\ud对比学习网络和d\uc对比学习网络;
[0054]
(3)网络训练:对每个对比学习网络构建相应的正负样本集并训练网络,直到验证集损失函数值小于训练集损失函数值且在训练次数内验证集损失值最小;
[0055]
进一步地,烟叶部位的判别模块具体步骤包括:
[0056]
(1)计算烟叶部位识别的归化矢量qi,i=1,2,
…
,n
[0057][0058][0059]
所述p
1i
=ui,p
2i
=ci,p
3i
=di,q
ij
为归化矢量qi的第j列元素。
[0060]
(2)根据归化矢量的值判断烟叶部位
[0061][0062]
其中yi表示第i个样本的部位。
[0063]
本发明的有益效果在于:
[0064]
(1)通过光谱特征参量化进行数据维扩展,可以增加不同部位数据的区分度,提高分类精度;
[0065]
(2)采用多个二分类对比学习网络和深度神经网络分类器结合,可以深度挖掘光谱数据内部不显著的特征信息,建立烟叶部位和光谱特征的复杂映射关系,提高分类效果;
[0066]
(3)提出过渡部位的概念,通过计算归化矩阵实现烟叶部位的不完全确定,充分考虑人工标签的主观性,可以减少人工标签的主观性对分类结果的影响;
[0067]
(4)相比人工识别、测量等方法,利用近红外光谱可以更快速的对大批次样本进行部位分析,从而能满足实际生产中对识别效率的要求。在利用近红外光谱进行建模时,分别运用了多次随机抽样及特征提取的方式进行光谱中部位特征的提取,然后再进行部位识别。可看出,这样方式比现有技术的识别正确率更高,面对不同省份、不同时间、批次的样本,模型的稳定性更好。
附图说明
[0068]
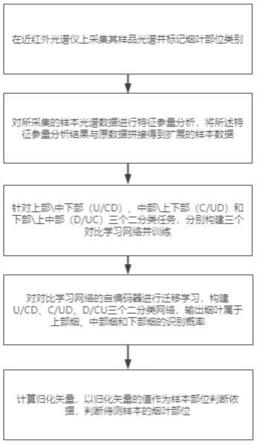
图1是本发明基于近红外光谱和对比学习的烟叶部位判别方法实施例的基本步骤流程图
[0069]
图2为本发明基于近红外光谱和对比学习的烟叶部位判别转置的结构示意图。
[0070]
图3是部分原始样本光谱曲线。
[0071]
图4是部分数据维扩展后的样本光谱曲线。
具体实施方式
[0072]
下面将对本发明实施例中的技术方案进行清楚、完整地描述,本发明地保护范围不受实施例地限制,本发明的保护范围由权利要求书决定。基于本发明中的实施例,本领域普通技术人员在没由做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0073]
如图1和2所示,本发明涉及近红外无损检测技术领域,公开了基于近红外光谱和对比学习的烟叶部位判别方法。在近红外光谱仪上采集其样品光谱并标记烟叶部位类别;对所采集的样本光谱数据进行特征参量分析,将所述特征参量分析结果与原数据拼接得到扩展的样本数据;针对上部\中下部(u/cd)、中部\上下部(c/ud)和下部\上中部(d/uc)三个二分类任务,分别构建三个对比学习网络并训练;对对比学习网络的自编码器进行迁移学习,构建u/cd、c/ud、d/cu三个二分类网络,输出烟叶属于上部烟、中部烟和下部烟的识别概率;计算归化矩阵,以归化矩阵的值作为样本部位判断依据,判断待测样本的烟叶部位。本发明利用近红外光谱可以更快速的对大批次样本进行部位分析,从而能满足实际生产中对识别效率的要求;通过特征参量分析进行数据扩展,可以增加不同部位数据的区分度,提高识别精度;将对比学习网络和深度神经网络分类器结合,可以充分提取不同部位烟叶光谱数据的显著特征,提高分类效果。因此,本发明利用近红外光谱分析技术,为烟叶部位无损判别提供了一种高效稳定的技术手段。
[0074]
实施例一
[0075]
步骤1、样本制作
[0076]
采集云南、湖南、贵州三地2018-2020年的各等级原烟样本光谱数据共8511条,n=8511。选取波段在892-1699nm的光谱数据,通过插值得到波段数l=257。标记样品部位信息,上部记作u,中部记作c,下部记作d。如图3所示是部分原始样本光谱曲线。
[0077]
步骤2、样本数据维扩展
[0078]
光谱特征参量采用二阶微分光谱。
[0079]
对每个样本vi(i=1,2,...,n),计算其二阶微分光谱
[0080][0081][0082]
其中v
ij
为vi的第j个元素,为的第j个元素,l为光谱波段数;
[0083]
经归一化得到再通过拼接得到1
×
512的样本矢量;
[0084][0085]
如图2所示是部分数据维扩展后的样本光谱曲线。
[0086]
步骤3、对比学习网络构建与训练
[0087]
选取cpc模型作为对比学习模型,构建u/cd对比学习网络、c\ud对比学习网络和d\uc对比学习网络。
[0088]
将每个样本矢量经转换函数重排为32
×
16的矩阵并复制3次,重叠得到32
×
16
×
3的多维矩阵ii;将转换后的n个数据ii(i=1,2,
…
,n)以8:2的比例随机划分为校正集(训练集、验证集)和测试集;对校正集以9:1的比例随机划分为测试集和验证集。
[0089]
训练u/cd对比学习网络:对训练集和验证集的标签进行二值化,对不属于u类的标签设值为1,对属于u类的标签设值为0。设置训练次数,将训练集和验证集输入u/cd对比学习网络进行训练,选择验证集损失值小于训练集损失值且在训练次数内验证集损失值最小的模型作为最终模型。
[0090]
训练c/ud对比学习网络。对校正集和测试集的标签进行二值化,对不属于c类的标签设值为1,对属于c类的标签设值为0。经过和训练u/cd对比学习网络相同的操作得到c/ud对比学习网络。
[0091]
训练d/cu对比学习网络。对校正集和测试集的标签进行二值化,对不属于d类的标签设值为1,对属于d类的标签设值为0。经过和训练d/cu对比学习网络相同的操作得到d/cu对比学习网络。
[0092]
步骤4、分类网络的构建与训练
[0093]
选用对比学习网络迁移学习的深度神经网络作为分类模型,分类网络包含:自编码器、深度神经网络和类别判别器。以u/cd分类网络为例,具体为:
[0094]
以u/cd对比学习网络的编码器encoder参数初始化分类网络的自编码器,连接三层深度神经网络,最后softmax回归分类。
[0095]
对训练集和验证集的标签进行二值化,对不属于u类的标签设值为1,对属于u类的标签设值为0。设置训练次数,将训练集和验证集输入u/cd分类网络进行训练,选择验证集损失值小于训练集损失值且在训练次数内验证集损失值最小的模型作为最终模型,输出样本属于上部烟的概率ui,i=1,2,...,n。
[0096]
分类网络的损失函数定义为交叉熵函数:
[0097][0098]
其中n代表样本数量,x代表样本集,x代表x中的一个样本数据,p(x)代表真实概率分布,q(x)代表预测概率分布。
[0099]
用同样的方法构建并训练c/ud分类网络和d/cu分类网络,分别输出样本属于中部烟的概率ci和下部烟的概率di,(i=1,2,...,n)。
[0100]
步骤5、烟叶部位判别:
[0101]
烟叶部位判别采用完全确定法,具体判别规则为:
[0102][0103]
其中yi表示第i个样本的部位;
[0104]
实施例二
[0105]
实施例二的步骤1至4与实施例一完全相同。
[0106]
步骤5、烟叶部位判别:
[0107]
烟叶部位判别采用不完全确定法,具体过程为:
[0108]
计算烟叶部位识别的归化矢量
[0109][0110][0111]
所述p
1i
=ui,p
2i
=ci,p
3i
=di,q
ij
为归化矢量qi的第j列元素。
[0112]
判别烟叶部位:
[0113]
其中yi表示第i个样本的部位。
[0114]
按照上述步骤进行光谱数据处理和模型构建,将处理后的测试集光谱输入模型进行部位判定,测试集的烟叶部位分别采用完全确定法和不完全确定法进行判别。表1给出了对比学习和分类采用二分类组合模型和单个三分类模型并结合不同数据处理方法和不同部位判别方法时的烟叶部位识别精度比较,其中二分类组合模型表示本发明提出的采用三个二分类对比学习网络与深度神经网络分类器结合实现三分类的模型,单个三分类模型表示不使用二分类,直接用一个三分类对比学习网络与深度神经网络分类器结合实现三分类的模型。
[0115]
表1结果验证了本发明的4个有益效果:(1)本模型用数据维扩展后分类精度提高了10%;(2)采用多个二分类器组成三分类器,相比单个三分类模型,无数据维扩展和有数据维扩展下,分类精度都有超过10%的提升;(3)考虑过渡部位的不完全确定方法相比完全确定方法可以提高分类精度;(4)实验中样本包括不同省份、不同时间、批次的样本,结果模型的稳定性都很好。
[0116]
表1不同方法的烟叶部位识别率比较
[0117]
[0118]
本发明的上述实施例仅仅清楚地说明本发明所作的举例而并非是对本发明的实施方式的限定对于所属领域的普通技术人员来说在上述说明的基础上还可以做出其他不同形式的变化或变动这里无法对所用的实施方式予以穷举凡是属于本发明技术方案所引申出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1