确定几何参数值的计算机实现方法与流程
1.本发明涉及确定几何参数值的计算机实现方法。
背景技术:
2.在制造构件时或在制造构件之后,为了质量保证可以在构件的二维图像中进行尺寸测量。为了进行尺寸测量,例如可以确定构件上的待测线段。为此确定线段两端的彼此距离。线段两端之间距离的确定取决于线段两端距用于捕获该构件的二维图像的成像装置的距离。因此须知道或确定关于在二维图像内的线段两端的位置的深度信息。利用该深度信息,可以将成像距离换算为尺度参数。
3.已知的是,当进行轮廓投影仪中的光学测量时采用远心物镜(例如参见rainer schuhmann和thomas的“用于光学测量和检查技术的远心系统(telezentrische systeme f
ü
r die optische meβ-und pr
ü
ftechnik)”,技术测量,第65卷第4期,1998,issn 0171-8096,第131-136页,和dutschke w.(2002)微测量头和轮廓投影仪(meβmikroskop und profilprojektor),加工测量技术,vieweg+teubner出版社),此时图像比例与对象距物镜的距离无关是恒定的。但这是比较昂贵的。此外,在轮廓投影仪的情况下大多只能在清晰限定的测量平面内测量。因此大多采用以下物镜,其中,图像比例并非与对象距物镜的距离无关。例如当通过x射线源和面探测器形成射线锥体形状时,用x射线透射对象通常具有该特性。依据由此生成的二维图像或投影推导出深度信息并非易事。此外,首先必须识别出该构件上的待测线段并确定位置。这在采用计算机实现方法的情况下尤其如果要以亚像素精度来实现时并非易事。此外,例如当线段两端距成像装置具有不同的距离时所需时间也随之增加。
技术实现要素:
4.因此本发明的任务是提供一种方法,在执行该方法时能尽量快速精确地在构件的二维图像中进行测量。
5.根据本发明,规定一种从测量体积的至少一个二维图像确定对象的至少一个待测部分的几何参数值的计算机实现方法,其中,该测量体积包括该对象并且该对象的待测部分包括在该测量体积内的位置,其中,所述至少一个二维图像对应于拍摄几何形状,其中该拍摄几何形状描绘用于确定二维图像的探测器与该对象之间的几何关系,其中,该方法包括以下步骤:确定测量体积的至少一个二维图像;识别出所述至少一个二维图像内该对象的至少一个待测部分并且确定所识别出的至少一个待测部分的几何参数值。
6.本发明提供一种计算机实现方法,借此能识别对象的待测部分并且对其进行尺度测量。为此,在确定该对象所处的测量体积的二维图像之后,首先识别出要进行尺度测量的对象部分。接着,对所识别出的对象部分进行尺度测量,借此确定几何参数值。因为几何参数的确定在该对象待测部分的识别之后进行,故能以足够高的精度确定该几何参数。该几何参数例如可以是边缘或表面关于该对象部分的位置、孔的直径、取向和/或深度、销的直
径、该对象的两个部分或几何形状特征比如孔的间距或者该对象的两个点之间的距离。借助本发明,借助待测对象的二维图像提供几何参数,其可被用于对象的质量保证。二维图像例如可以是透射的图像或对象的光学图像。透射的图像例如可以借助例如具有射线锥几何形状的射线照相术来确定。光学图像例如可以借助摄像头必要时以规定的图像角度来确定。尺寸测量因此可以确定对象的至少一个部分的几何参数值。质量保证因此能利用待测对象的少量二维图像、例如仅一个二维图像来实现。通过这种方式,能在足够高的精度下用时少地执行尺寸测量。
7.所述拍摄几何形状例如可以是待测对象与用于确定该对象的二维图像的系统部件之间的相对定位,其中,该部件例如可以是辐射源和探测器或测量摄像头。例如其可以借助彼此之间的距离来描述用于确定二维图像的探测器与对象之间的相对定位。对象关于探测器的取向也可以通过拍摄几何形状来描述。
8.在一个示例中,识别至少一个二维图像中的对象的至少一个待测部分并确定所识别出的至少一个待测部分的几何参数值的步骤还可以包括以下子步骤:提供具有至少一个几何参考参数的至少一个已知值的至少一个二维参考图像;将所述至少一个二维参考图像与所述至少一个二维图像进行比较。
9.如下进行测量几何参数值,做法是将至少一个所确定的二维图像与待确定的几何参数值已知的至少一个二维参考图像进行比较。
10.根据此示例,所述至少一个二维参考图像可以描绘如下测量体积,其具有的参考对象具有与该对象一样的理论几何形状,其中,所述至少一个二维参考图像尤其是参考对象的模拟图像或真实图像。
11.参考图像可以是具有与待测对象一样的公称几何形状的参考对象的模拟二维图像或真实二维图像。参考对象的二维参考图像的拍摄几何形状应该尽量与用来确定被测对象的二维图像的拍摄几何形状相同。在模拟的参考图像情况下可以采用该对象的透射模拟或前向投影或光学模拟。对于模拟或前向投影,可以使用对象的cad模型或者或许用另一个传感器测量的另一对象的几何形状作为基础。参考图像的真实记录是利用其几何形状或相关几何特性已知的对象来进行的。这例如可以通过借助另一传感器的参考测量来确定。因而在两种情况下,二维参考图像中的待测测量参数的值都是已知的。
12.此外,在此示例中,识别至少一个二维图像中的对象的至少一个待测部分并确定所识别出的至少一个待测部分的几何参数值的步骤还包括以下子步骤:借助所述至少一个二维图像确定在所描绘的测量体积内的所识别出的至少一个待测部分的位置;确定在所述二维参考图像内的另一个位置,其中所述另一个位置对应于所述至少一个几何参考参数;确定所确定的位置相对于所述另一个位置的偏差;借助所确定的偏差确定所识别出的至少一个待测部分的几何参数值。
13.在此示例中,所述二维图像内的待测几何参数的位置和相对于二维参考图像的偏差被确定。由此推导出几何参数值。如有必要,该值最初只能在对象的投影平面内或其在投影平面上的投影进行计算。所述二维图像内的待测部分的位置例如可以利用常规样式识别来确定,例如通过识别边缘或从低灰度值到高灰度值的过渡。
14.根据该示例,还可以在比较所述至少一个二维参考图像与所述至少一个二维图像的子步骤中采用图像关联方法。
15.在此示例中采用图像关联方法(例如数字图像关联(dic)),以确定二维图像相对于参考图像的偏差。dic成对分析图像数据并且在本地平面内确定两个图像之间的对应关系。可依据所述对应关系来确定期望部分或待测部分或几何参数位于基于二维图像的测量数据中何处。这通过与参考图像的比较隐式地完成,从而例如不需要样式识别以明确识别出该对象的待测部分。样式识别此外必须针对每个对象待测部分任务专属地单独设立,而dic可以基本上通用。一旦二维参考图像与所确定的二维图像之间的对应关系通过该dic被确定,则可以针对所确定的二维图像确定几何参数值。这例如可以通过考虑参考值和二维图像相对于二维参考图像的畸变或差异来完成,所述畸变或差异可以通过本地位移向量来描绘。或者,可以通过dic来确定二维图像内的待测部分的位置并由此直接推导出几何参数值。这例如可以是两个对置边缘之间的距离,其在此情况下分别是对象的待测部分。
16.在另一个示例中,在确定测量体积的至少一个二维图像的步骤中,可以确定该测量体积的至少两个从不同的方向表示对象的二维图像,其中,至少在识别所述至少一个二维图像中的该对象的至少一个待测部分并确定所识别出的至少一个待测部分的几何参数值的步骤中,所述至少两个二维图像被一起使用。
17.针对几何参数,评估从各不同方向表示对象的二维图像。从共同的观看中推导出针对几何参数的测量结果。如果以相应不同的拍摄几何形状来观看至少两个图像中的几何参数或对象待测部分,则可以例如通过三角测量法来确定测量体积的三维位置和进而深度信息。通过这种方式,现在可以通过了解对象待测部分距探测器的位置来推导几何参数值。同样也可能的是三维确定几何参数值,而不是确定至二维图像的图像平面的几何参数的投影。从二维图像中,还可以例如分别确定几何参数的各个临时值并且将这些临时值计算成最终的几何参数值,例如通过加权求平均。越多的来自不同方向的二维图像被一并纳入几何参数的确定中,所确定的值往往越精确。体积数据的重建在此情况下不一定是必需的,因为几何参数值的确定仍然在二维图像内执行。通过这种方式,往往需要比在借助由二维图像完整重建体积数据确定几何参数值时更少的二维图像或投影。
18.另外,在确定测量体积的至少一个二维图像的步骤中,对象的至少一个待测部分可以以扫掠的方式成像,和/或该几何参数在平行于探测器的定误差角度范围内延伸。
19.如此选择该拍摄几何形状,对象待测部分尽量以扫掠方式成像和/或待测几何参数值在测量中尽量平行于探测器取向。例如,待测长度可通过这种方式被精确测量,因为长度的变化可以通过对象待测部分、在此情况下是作为边缘在二维图像内所显现的两端的位置变化和进而还有待测长度的变化在二维图像内被更好地识别。当该长度垂直于探测器取向时不是这种情况。在此情况下,不仅难以测量该二维图像内的待测部分的位置,也尤其难以识别该待测部分。替代地或附加地,可以在另一步骤中关注对象待测部分或二维图像内没有与其它几何形状或边缘相互重叠或被其覆盖的区域。
20.在另一个示例中,在确定测量体积的至少一个二维图像的步骤中,可以确定测量体积的至少两个从不同的方向表示对象的二维图像,其中该方法在该步骤与识别至少一个二维图像中的对象的至少一个待测部分并确定所识别出的至少一个待测部分的几何参数值的步骤之间包括以下步骤:确定在所述两个二维图像内的此时未布置该对象的任何部分的至少一个区域;借助所述至少一个区域确定该测量体积内的包络该对象的至少一个包络面;其中在识别至少一个二维图像中的对象的至少一个待测部分并确定所识别出的至少一
个待测部分的几何参数值的步骤中借助该包络面来确定该值。
21.依据多个二维图像的未布置任何对象部分的区域的识别,计算该对象的包络面。借助包络面来测量几何参数值。在已借助该对象的或测量体积的透射测量而确定的二维图像内,不具有射线衰减的区域表示此时未布置对象的任何部分的测量体积区域。所述区域可以在借助透射测量而确定的二维图像内被简单且快速地识别出。如果有来自各不同方向的信息,则可以很简单地且不必执行体积数据重建地预测出该测量体积内的粗略的对象几何形状。接着,基于该对象的粗略几何形状确定几何参数值。二维图像的拍摄以及几何参数的确定在此情况下都非常快。所述包络面在此是对测量体积内的对象表面的估计。该对象的实际表面可抛开测量误差不算仅位于被包络面包含的区域内,或者接触它。它可以是凸形包络面。在此,可以明确地在二维图像内搜索表示不具衰减的和具有衰减的区域、即不具对象的和具有对象的区域之间的过渡的边界区域。边界区域的位置可以在二维图像内也以亚像素精度被确定。依据该信息,可以更精确地确定所述包络面。
22.与确定测量体积的至少一个二维图像的步骤相结合,其中所述对象的至少一个待测部分以扫掠方式成像和/或该几何参数在预定误差角度范围内平行于探测器延伸,在此情况下有利的是,该对象被取向成或者拍摄几何形状被选择成,使得该对象的待测部分和/或其中设有待测几何参数的区域被尽量以扫掠的方式透射。还可能有利的是避免与其它几何形状或边缘重叠。
23.在另一个示例中,识别至少一个二维图像中的对象的至少一个待测部分并确定所识别出的至少一个待测部分的几何参数值的步骤还可以包括以下子步骤:从该对象在测量体积中的已知的位置和取向和对应于该对象的已知几何形状确定在该测量体积内的所识别出的至少一个待测部分的位置。
24.为了根据在二维图像中确定的位置或相对于参考图像的偏差确定几何参数值,几何参数的或待测部分的位置可以与距所确定的二维图像内的探测器的距离相关地被采用。这可以从对对象几何形状和关于拍摄几何形状的姿势的预先了解中推导出。对几何形状的预先了解例如可以源自cad模型、例如借助在预扫描范围内的相同的探测器或借助另一探测器的相同对象的测量或者具有相同公称几何形状的对象的测量。此外,可以对多个存在的二维图像进行快速重建,以获得对象几何形状的粗略估计。
25.根据另一个示例,在确定测量体积的至少一个二维图像的步骤中,可以确定该测量体积的至少两个以不同的拍摄几何形状表示对象的二维图像,其中识别至少一个二维图像中的对象的至少一个待测部分并确定所识别出的至少一个待测部分的几何参数值的步骤还包括以下子步骤:确定在所述至少两个二维图像内的对象的所识别出的至少一个待测部分的二维位置;借助在所述至少两个二维图像内的所识别出的至少一个待测部分的二维位置和在各不同拍摄几何形状之间的变化确定在该测量体积内的所识别出的至少一个待测部分的位置。
26.可以在拍摄几何形状被改变的同时确定二维图像。拍摄几何形状的变化可以借助在待测对象和探测器之间的相对位置和取向的改变进行。对象待测部分在所确定的二维图像范围内被追踪,其中至少两个二维图像被确定。根据在各不同二维图像范围内的待测部分位置变化和拍摄几何形状的变化,可以确定对象待测部分的空间位置。在此情况下,与例如从所用轴线确定的拍摄几何形状的变化相关的信息可予以考虑。
27.本发明尤其涉及平行于透射方向或观看方向的对象待测部分位置的确定,该位置与距探测器的距离相对应。这可在透射测量中涉及射线锥中的位置,在光学测量中对应于在例如可近似具有金字塔状的摄像头视野内的位置。特别是待测部分定位的变化可垂直于透射方向进行以实现待测部分的位置或距探测器的距离的精确确定。例如可使该对象在一个规定方向上位移一个线段a,其中如果所述定位借助高精度轴线执行,则线段a是已知的。
28.该方法还可以例如在确定测量体积的至少一个二维图像的步骤之前还包括以下步骤:确定至少一个二维图像的实际拍摄几何形状;确定针对所述至少一个二维图像的理论拍摄几何形状;确定实际拍摄几何形状与理论拍摄几何形状之间的偏差;在该实际拍摄几何形状中修正该偏差。
29.为了保证该拍摄几何形状是正确的,确定实际拍摄几何形状以及与理论拍摄几何形状的偏差。该偏差可以借助用于确定对象的二维图像的系统轴线来进行修正。为此,例如可以拍摄二维图像并将其与例如来自在先测量或模拟的二维理论图像相比较。依据图像的比较,可以推断出相对于理论拍摄几何形状的偏差。替代地或附加地也可以为此采用其它的探测器或传感器。
30.根据另一个示例,在测量体积内的预定位置处布置至少一个标记元素,其中,所述至少一个二维图像的拍摄几何形状借助所述至少一个标记元素来确定。
31.因此可以在测量体积内布置多个标记元素。通过这种方式,可以精确地确定二维图像的拍摄几何形状。对拍摄几何形状的了解可被用来检查该拍摄几何形状或在采用理论拍摄几何形状时确定与理论拍摄几何形状的偏差。如果多个二维图像或从该图像推导出的测量结果被共同考虑,则拍摄几何形状的精确认识可以提高评估精度。标记元素本身可以在二维图像中被识别和定位。当在一个二维图像内识别出足够多的标记元素时,可以由此确定拍摄几何形状的自由度,自由度的数量例如可以为九。其数学流程例如从摄影测量学中获知。这些标记元素还可以例如用其它传感器来定位,以便由此计算拍摄几何形状。这些标记元素可以是编码的测量标记。在透射测量中,标记元素可以是球或小球,其被固定在待测对象、待测对象的界定面或测量体积的其它部位上。各种不同的球可以按螺旋线形式布置。要尽量避免该对象的待测部分被标记元素遮挡。
32.另外,该方法可以在确定测量体积的至少一个二维图像的步骤之前还包括以下步骤:从待测参数的已知特性以及对象的几何形状中推导出针对所述至少一个二维图像的优选拍摄几何形状。
33.在此示例中,优选拍摄几何形状可以借助对该对象的待测几何参数和几何形状的了解推导出。在这些拍摄几何形状中,能以尽量高的精度测量维度尺寸。对待测的几何参数的了解例如可以源自该对象的cad模型。接着,优选拍摄几何形状可被用在该对象的二维图像的确定中。这优选可以在依据已成像的对象部分或早期确定的二维图像的确定期间来进行。在此,尤其是可以考虑如下区域或几何参数,其中例如在评估已有的测量数据之后还不能确定更可靠的值。还可以考虑对象的待测部分的扫掠观察。此外,可以如此选择该拍摄几何形状,即,在二维图像内的这些区域没有与其它的几何形状或边缘相互重叠。待测的几何参数可以在确定二维图像时尽量平行于探测器取向。另外,可以在一些单独的二维图像内布置尽量多的标记元素。优选在尽量少的二维图像中,能同时测量对象的尽量多的待测部分或者能测量所有几何参数。
34.根据另一个示例,在确定测量体积的至少一个二维图像的步骤中,所述至少一个二维图像可借助透射测量来确定,并且另一个对象接触所述对象的至少一个待测部分,其中在识别至少一个二维图像中的对象的至少一个待测部分并确定所识别出的至少一个待测部分的几何参数值的步骤中,可以确定所述另一个对象的位置从而确定所识别出的至少一个待测部分的位置。
35.对象的至少一个待测部分在此情况下可以被另一个对象接触。另一个对象因此接触对象待测部分的表面。在作为透射图像存在的二维图像中,可以对所述另一个对象的位置进行测量,并且通过这种方式推断出所接触的对象待测部分的位置。这因此属于间接测量。替代地或附加地,可以采用传统的接触式传感器作为另一个对象。它们本身可以在它们例如接触或触碰到一个对象的表面时通过小的偏移或作用于卡钳的小的力来进行记录。
36.在另一个示例中,球可被用作所述对象,例如从接触测量中知道的触球。有利地,它可以具有比较高的x射线吸收性,以便它可以在作为透射图像被确定的二维图像内被尽量好地识别。此外,在此示例中该对象从多个方向被透射,以便能三维地确定位置。
37.为了识别接触,可以按照作为透射图像存在的二维图像的顺序例如跟踪卡钳的运动。在此可以记录该运动何时改变。如果卡钳在先已移向该对象且接着停止不动,则识别出接触。类似地,卡钳也可以是固定不动的,而该对象被移动。如果卡钳随后移动则识别出接触。依据所述运动的改变,可以回算出接触方向。利用关于扫描球的中心点和半径的预定信息,可通过这种方式来确定精确的接触点并进而确定该对象的表面位置。
38.代替单个位置,例如也可以同时接触多个位置,例如通过接触件的梳状结构。如果该对象或呈卡钳状的接触件被相应连续移动,则也能获得多条测量线。通过错开布置卡钳,也可以同时获得多条测量线。例如卡钳可以是弹簧安装的。弹簧安装例如可以借助螺旋弹簧构成。替代地或附加地,可以使用如下卡钳,其侧向接触且便移并且例如借助片簧被安装。
39.在作为透射图像被确定的二维图像情况下,在另一个示例中,尤其当该对象不具有高吸收、即在二维图像中仅造成低对比度时,该对象的平面区被涂抹高度吸收性材料,例如被涂漆。接着,可以在二维图像中测量该材料的几何形状。由此可以推断该对象的几何形状。所涂抹的高度吸收性材料在此示例中可作为接触件。
40.从借助接触件的间接测量的结果中且或许结合例如来自cad模型的与对象几何形状相关的信息,可以推断出在测量体积内的该对象的取向。关于取向的信息可以在该方法的其它步骤中被用于例如确定该拍摄几何形状或者确定该对象距探测器的距离。
41.被用于间接测量的接触件例如也能被用作标记元素,以执行几何形状校准,即拍摄几何形状的九个自由度的确定。
42.在另一个示例中,能够借助工具(例如像工具球)来确定几何参数(例如对象、如孔的待测部分的取向和深度),而不是单独的接触点。
43.本发明还涉及一种计算机程序产品,其具有可在计算机上执行的指令,所述指令在计算机上执行以促使计算机执行根据以上说明的方法。
44.计算机程序产品的优点和作用以及改进方案来自上述方法的优点和作用以及改进方案。因而就此而言,参照之前的说明。计算机程序产品例如可以是数据载体,其上存储有计算机程序,其包含计算机可执行的指令。替代地或附加地,计算机程序产品例如也可以
是永久性或易失性数据存储器如闪存或主存储器,其包含所述计算机程序。但并未排除其它类型的包含计算机程序的数据存储器。
附图说明
45.本发明的其它特征、细节和优点来自权利要求的措辞以及以下结合附图对实施方式的说明,其中:
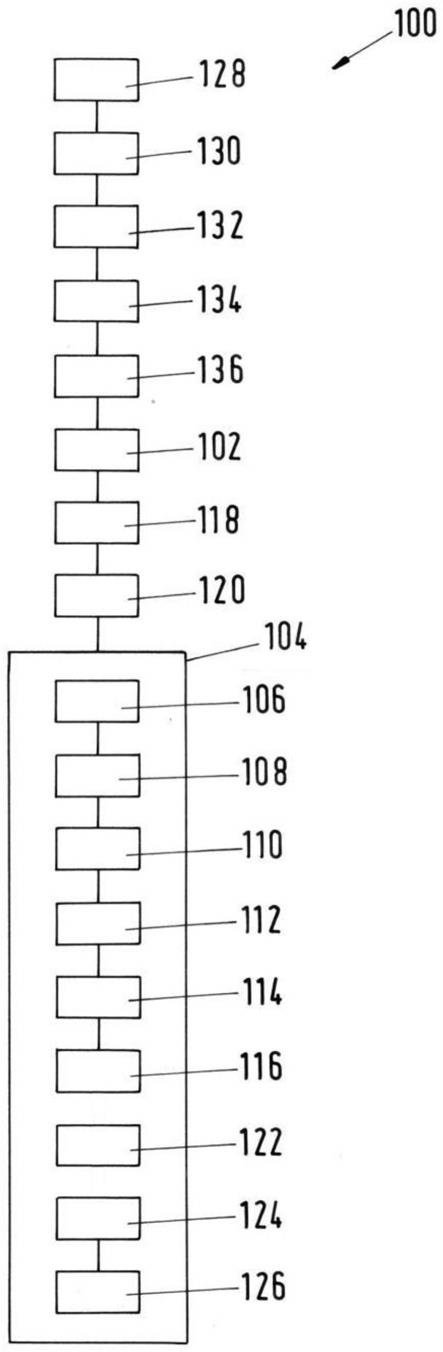
46.图1示出了计算机实现方法的流程图;
47.图2示出了系统的拍摄几何形状的示意图;
48.图3示出了对象的取向的示意图;
49.图4a至图4c示出了测量体积的示意图;
50.图5示出了拍摄几何形状的改变的示意图;
51.图6a和图6b示出了具有接触件的系统的示意图。
具体实施方式
52.在下文中,从测量体积的至少一个二维图像确定对象的至少一个待测部分的几何参数值的计算机实现方法总体上如图1所示地用附图标记100标示。
53.方法100可以与用于确定二维图像的系统10结合使用。如图2所示,系统10包括包含对象16的测量体积22。测量体积22可以借助系统10来测量。系统10在此包括元件12,其在透射测量中可以是辐射源。在光学测量中,元件12可以是摄像头,其中,摄像头的图像传感器可以被解读为探测器。另外,系统10可以具有另一个元件14,其在透射测量中可以是探测器,并且在光学测量的情况下例如可以是形成相对于对象16的对比度足够高的背景的屏幕。包含对象16的测量体积22可以布置在元件12与元件14之间。
54.对象16具有待测部分20,其在图2中用虚线圆圈被框起来。对象的待测部分20包括几何参数,其值将用方法100来确定。另外,待测部分20布置在测量体积22内的一个位置处。待测部分20的各不同部段可布置在测量体积22内的不同位置处。对象16可具有多个待测部分20。此外,可以测量大量不同的几何参数。几何参数例如可以是关于该对象的一部分的边缘或表面的位置、直径、孔的取向和/或深度、销直径、对象的两个部分的间距或者距孔的几何形状特征的距离或对象的两个点之间的距离。
55.为此,在步骤102中确定该测量体积的至少一个二维图像。该二维图像是测量体积的投影图像。因为该测量体积包含该对象,故该测量体积的至少一个二维图像也包含该对象的二维图像。
56.在透射测量中,所述至少一个二维图像还包括该对象的待测部分的投影图像。
57.在光学测量中,所述至少一个二维图像包括该对象的待测部分,此时该部分对准摄像头且未被该对象的其它部分遮挡。
58.在步骤102中,可以在第一替代方案中确定测量体积的唯一的二维图像。在另一个替代方案中,可以确定测量体积的两个以上的二维图像。测量体积的各个不同的二维图像可以从不同的方向表示该对象。
59.当在步骤102中确定测量体积的至少两个从不同的方向表示该对象的二维图像时,可以在以下步骤中共同使用所有所述至少两个二维图像。此时,例如可以采用来自至少
两个二维图像的结果的求平均或在另一个示例中采用关于拍摄几何形状的信息,以执行三角测量法。此外,也可以在以下步骤中利用所述至少两个二维图像之间的变化。
60.此外,在步骤102中可以以扫掠的方式来成像该对象的至少一个待测部分。这例如可以如此进行,使该对象的待测部分在至少一个二维图像中布置在该对象的边缘处。通过这种方式,例如能以高精度且不太费事地确定该对象的待测部分的厚度作为几何参数。
61.替代地或附加地,其值将被确定的几何参数可尽量平行于探测器取向。因此例如孔或开口可以定向成使其直径平行于探测器布置。
62.这通过图3被示意性示出。在此,几何参数18平行于元件14延伸,该元件在此示例中可以是探测器。
63.平行度可被固定在一个由误差角度范围限定的误差范围内。误差角度范围可被预先确定且例如关于平行于探测器的平面为+5
°
和-5
°
。这也提高作为几何参数的直径的确定精度,并且降低几何参数值的确定的成本。
64.在步骤102之后,在步骤104中,在至少一个二维图像中识别该对象的至少一个待测部分,并且确定所识别出的至少一个待测部分的几何参数值。在第一示例中,所述识别可以借助样式识别来执行。在另一个示例中,待测部分的识别可以隐式地通过其它方法来进行。以下将对此进行举例说明。
65.因此,在步骤104的可选的子步骤106中可以提供至少一个二维参考图像。该参考图像包括至少一个几何参考参数的已知值。所述至少一个几何参考参数可以是如下参数,其与待测部分的几何参数相似或等同。
66.在此,所述至少一个二维参考图像能可选地描绘测量体积,其包括具有与该对象一样的理论几何形状的参考对象。因为参考对象具有与该对象一样的理论几何形状,故参考对象也包括对应于该对象的待测部分的参考部分。该参考部分的几何参数因此可以用作待测部分几何参数的几何参考参数。
67.在此,二维参考图像可以尤其是参考对象的模拟图像或真实图像。模拟的参考图像例如可以基于该对象的cad模型。
68.在步骤104的另一个跟在子步骤106后的可选的子步骤108中,可以进行至少一个二维参考图像与至少一个二维图像之间的比较。此时,其值已知的几何参考参数可以与待测部分的几何参数相比较。通过这种方式,可以识别对象待测部分,同时确定该待测部分的几何参数值。这简化了步骤104。
69.可选的子步骤108还可以借助图像关联方法来执行。利用图像关联方法,可以在二维参考图像与二维图像之间进行隐式且易执行的比较。于是,不再需要单独的样式识别以识别构件的待测部分。
70.步骤104还可以具有可选的子步骤110、112、114和116。
71.可选的子步骤110涉及确定所识别出的至少一个待测部分在所成像的测量体积内的位置。这将借助所述至少一个二维图像来进行。
72.在可选的子步骤112中在二维参考图像中确定另一个位置,其对应于参考对象的具有所述至少一个几何参考参数的参考部分。
73.可选的子步骤110和112能以任何顺序执行或者也可以同时执行。
74.接着,在可选的子步骤114中,确定所识别出的至少一个待测部分的所确定的位置
相对于参考部分的所述另一个位置的偏差。该偏差可能源自所述对象与参考对象相对于用于确定二维图像的系统的各不同取向。或者,该偏差可能源自在制造对象时相比于参考对象的误差。
75.在可选的子步骤116中,借助所确定的偏差和几何参考参数的已知值来确定所识别出的至少一个待测部分的几何参数值。因此,能借此以足够高的精度确定待测部分在二维图像内的位置,因为该待测部分必须具有与几何参考参数相似的几何参数值。因此将进一步简化步骤104。
76.当在步骤102中确定测量体积的至少两个从不同的方向表示该对象的二维图像时,可以在步骤102和步骤104之间设置可选的步骤118和120。
77.在可选的步骤118中,确定所述至少两个二维图像内的至少一个未布置任何对象部分的区域。这将结合图4a至图4c来详细说明。
78.在图4a中示出了包括对象16的测量体积22,对象具有待测部分20。该待测部分20具有其值待确定的几何参数18。测量体积22被分成各不同区域24、26、28、30、32、34和36。区域24至36能借助测量体积32的多个二维图像来确定。因此从第一二维图像确定例如区域24、26和32。可以从第二二维图像确定区域28和34,第二二维图像从一个不同方向描绘测量体积22和进而对象16。所述区域24至36不包括该对象且因此不包含任何对象部分。
79.根据图4b,因此可以确定一个包括该对象的区域38。该区域38被用在可选的步骤120中,以确定该测量体积内的包络该对象的包络面。该包络面在此包围该对象。对象或其表面在最高点接触包络面并且在其它地方在由包络面包围的区域内延伸。该包络面可能是凸形的。
80.于是在步骤104中,借助包络面来确定几何参数18的值40,如图4c所示。但是,值40仅说明几何参数18的上限,因为待测部分20位于包络面内并且在此并不一定接触包络面。
81.步骤104还可以具有可选的子步骤122。
82.在可选的子步骤122中,确定所识别出的至少一个待测部分在该测量体积内的位置,其做法是利用对象在该测量体积内的已知位置和取向以及对应于该对象的已知几何形状。因此,利用对该对象几何形状的事先了解。所述事先了解例如可以来自该对象的cad模型、该对象的早期测量或具有与待测对象相同的理论几何形状的其它对象的测量。另外,可以如下获得所述预先了解,做法是例如在透射测量中确定该对象的或该测量体积的多个二维图像,并且执行借助这些二维图像的快速重建,其提供了该对象的体积数据。伴随所获得的预先了解,可以估算该对象及其部分距探测器的距离。借助对所述距离的估算,可以更精确地确定该对象的待测部分的位置。
83.此外,当在步骤102中确定该测量体积的至少两个以各不同的拍摄几何形状表示该对象的二维图像时,步骤104还可以具有可选的子步骤124和126。
84.利用可选的子步骤124,确定该对象的待测部分在至少两个二维图像中的二维位置。在此,可以采用二维图像的坐标。这意味着关于对象的待测部分的位置的深度信息最初尚不可用。
85.由于在测量体积的至少两个二维图像中的拍摄几何形状不同,故所确定的二维位置不同。在此,不同的拍摄几何形状之间的变化是已知的。
86.在可选的子步骤126中,随着不同的拍摄几何形状与所确定的二维位置之间的变
化可以确定所识别出的至少一个待测部分在测量体积内的位置。
87.这将结合图5来详细说明,图5示意性示出了拍摄几何形状的变化。线段a在此描绘对象16相对于元件14的相对位移,该元件14在此示例中可以是探测器。元件12可以在此示例中是辐射源。位移的对象带有附图标记16
‘
。系统10可具有高度精确的轴线(未示出),借此能高度精确地改变该拍摄几何形状。
88.通过在系统10内使用高度精确的轴线来确定该对象16的二维图像,线段a可以是已知的。二维图像内的待测部分20在元件14上的位置(例如对象16的上边缘的位置)的改变例如可以是线段b。线段b的值可以在二维图像内测量。因为元件14的尺寸是已知的,故可以以毫米的精度从中计算出线段b。距离42可以是待测部分20距元件12的间距,距离44是元件14的相应点至元件12的间距。当距离44为已知、例如从元件14和元件12的定位中借助高度精确的轴线计算出时,可以算出距离42、并通过距离42=距离44*a/b算出待测部分20在拍摄几何形状中的位置。借助对距离42的了解,可以简化测量对象和对象待测部分在该测量体积内的定位的确定。
89.这也可以类似地套用到借助摄像头的光学测量中,此时,元件12可以是摄像头,元件14可以是屏幕。在此情况下,将测量元件12上的图像。以上所做说明将与此相应地被调整,在这里必须关注的是摄像头不采用点状图像,而是也采用面来获得待拍摄图像。严格讲,在图5中,摄像头的光学传感器因此将从所示三角形的尖略微向左移动,在这里,透镜系统可以位于所述尖处。
90.除了在该对象的16运动开始和结束之前确定二维图像外,也可以在此运动期间拍摄二维图像,以便能更好地跟踪待测部分20。在此可能有意义的是,可以通过移动轴或机器人手臂来短暂中断定位变化,以便能够拍摄二维图像而不会出现运动模糊。
91.可选地,方法100可以在步骤102之前具有步骤128、130、132和134。
92.在可选的步骤128中,确定针对所述至少一个二维图像的拍摄几何形状。这于是被称为实际拍摄几何形状。
93.此外,在可选的步骤130中确定针对所述至少一个二维图像的理论拍摄几何形状。该理论拍摄几何形状例如可以从该对象的先前拍摄的二维图像中确定。替代地或附加地,该理论拍摄几何形状也可以从该对象的模拟中来确定。
94.此外在可选步骤132中,确定实际拍摄几何形状与理论拍摄几何形状之间偏差。因为实际拍摄几何形状一般不等于理论拍摄几何形状,故要定期观察偏差。系统10的轴线设定得越精确,实际拍摄几何形状的偏差一般越小。
95.实际拍摄几何形状与理论拍摄几何形状之间的偏差利用可选的步骤134来修正。该偏差例如可以借助系统10的轴线来修正。
96.为了确定实际拍摄几何形状和理论拍摄几何形状,可利用另外的传感器。
97.在另一个示例中,可选地在系统10内可以布置至少一个接触件46,如图6a和图6b所示。接触件46布置在该测量体积内的预定位置处。借助该接触件46,可以确定所述至少一个二维图像的拍摄几何形状。
98.当在步骤102中借助透射测量确定至少一个二维图像并且另一个对象接触所述对象的至少一个待测部分时,可以在步骤104中确定所述另一个对象的位置以确定所识别出的至少一个待测部分的位置。为此可使用所述接触件。
99.因此,可以进行对该对象的待测部分的间接测量。
100.接触件46在此被设计成检测与对象16的表面的接触。对象16在拍摄几何形状中如此布置,其尽量接触所有的接触件46。通过这种方式,可以确定对象16表面在接触件46处的位置。
101.图6a在此示出了接触件46,其通过螺旋弹簧52被弹性支承。因此能改变其在螺旋弹簧52的延伸方向上的位置。接触件46在此还被设计成使得它们在二维图像内产生高对比度。
102.图6b示出了借助片簧50安装的接触件46。该接触件46可以在片簧50的侧向上被偏移。另外,可以执行对象16的移动以实现拍摄几何形状的改变。该移动在图6b中用箭头48示意性地表示。通过这种方式可以检测接触对象16的表面的多条测量线。
103.此外在图6b中还示出了,这些接触件46是相互错开布置的。因此,可以检测多条测量线,它们能测量在该对象的表面上的多条线,而接触件不会相互遮挡。
104.作为接触件46的替代或补充,可采用标记元素,它们在测量体积内具有固定的已知位置。借助标记元素的已知位置,可以确定拍摄几何形状,并且相对于理论拍摄几何形状的偏差也可被确定。在图6b中例如可以用标记元素代替所述接触件46,其中所述片簧50被刚性保持件取代,从而标记元素位置固定地安置在该测量体积内。
105.在步骤102之前可以规定其它可选步骤。因此,该方法100还可以具有可选的步骤136。
106.在可选的步骤136中,从已知特性推导出针对至少一个二维图像的优选拍摄几何形状。先前已知的特性与要测量的参数有关,该参数是要测量的几何参数的基础。此外,已知特性涉及该对象的几何形状和材料。
107.在此步骤中,对已知特性的了解也可以例如源自该对象的cad模型。
108.在确定了优选拍摄几何形状之后,该优选拍摄几何形状可被用于确定所述至少一个二维图像。因此,该拍摄几何形状能优选地适配于该对象的待测部分或者将被确定的几何参数。
109.如果例如无法针对指定的待测部分进行在两个维度上的评估或只能不够精确地进行,则例如可以本地进行在三个维度上的评估。这例如可以基于由二维图像重建的体积数据来进行。为此必须分别知道所述拍摄几何形状。
110.在与二维参考图像比较时,例如也可以将该对象的最小和最大几何形状作为基础。因此有至少两个二维参考图像。如果被测的二维图像关于对象的待测部分位于两个极限状况内,则对象的待测部分被评估为正常。因而在此情况下或许不存在例如毫米精度的明确测量结果,而是仅有作为测量结果的说明“正常”或“非正常”。
111.此外,例如可以例如以光学方式或许也用其它传感器来执行快速总览扫描,以确定对象的取向。在此情况下,对象的待测部分的这些区域可被识别并且该对象根据总览扫描被定向。
112.如果在透射测量示例中在针对一个拍摄几何形状采用不同x射线谱(双能或多能)的情况下拍摄例如不同的二维图像,则它们可被计算出。在通过这种方式出现的二维图像中,可以更好地区分开或识别不同的材质。多材质对象的测量精度可以通过这种方式来提高。
113.本发明还涉及计算机程序产品(未示出),其所具有的指令可在计算机上执行。当指令在计算机上执行时,它们促使计算机执行上述的方法100。
114.计算机程序产品例如可以是数据载体,其上存储有计算机程序。该计算机程序可以执行可执行文件。替代地或附加地,计算机程序产品可以是永久的或易失的数据存储器。在此情况下,计算机程序产品也包括包含指令的计算机程序。
115.该方法100的步骤的在此所指出的顺序只要在逻辑上有意义就能同时或以其它的顺序来执行。
116.本发明不限于前述实施方式之一,而是可以按各种方式进行改变。所有来自权利要求书、说明书和附图的特征和优点(包括结构细节、空间布置和方法步骤)不仅本身而言而且也可以在各种不同组合中对于本发明来说都是必不可少的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1