一种船舶烟道清理检测机器人及其清理检测方法
1.本发明涉及一种清理检测机器人,尤其是涉及一种船舶烟道清理检测机器人及其清理检测方法。
背景技术:
2.为保证船舶锅炉的正常运转,需要对船舶烟道进行养护、检测,确保烟道通畅、无破损。船舶烟道处于高盐分、高湿度及高温的恶劣环境中,容易受到了腐蚀,腐蚀易导致管路变薄,进而破损,缩短船舶排烟系统及相关设备的运行寿命,提升船舶的维护保养费用。
3.现有的养护手段主要是水洗和手工铲除。水洗存在的主要弊端是消耗的水资源较大,对于航海船舶的负担较大,且溶解灰渣之后会变成酸性溶液,加速对烟道的腐蚀;若是酸性溶液流入锅炉内,极易破坏炉墙的耐火砖,造成更大的损失。若是手工铲除烟灰,由于炉膛温度较高,工作环境恶劣,对劳作人员的身体伤害较大。
4.目前,市场上还没有一种有效的积尘处理设备能够完全取代人工进行清灰和排灰工作,一些工厂采用人工除尘和铲斗式排灰设备相结合的模式,但清灰设备的一次装载量有限,而且需要反复多次装载,未能提高除尘效率和降低人工风险。
技术实现要素:
5.发明目的:针对上述问题,本发明的目的是提供一种船舶烟道清理检测机器人,解决船舶烟道内部排灰问题,检测对缺陷的方向性敏感的问题,满足船舶烟道清理检测要求,提高除尘效率和降低人工风险,并提供了其清理检测方法。
6.技术方案:一种船舶烟道清理检测机器人,包括万向节、支撑轮机构以及依次间隔排列的清管驱动节、漏磁检测节、计算机节、排灰节,清管驱动节与漏磁检测节之间、漏磁检测节与计算机节之间、计算机节与排灰节之间分别通过一个万向节同轴连接,漏磁检测节、计算机节、排灰节同侧的一端上分别安装有一个支撑轮机构。
7.进一步的,清管驱动节包括清管钢刷、刷头电机、支架、行走驱动电机、齿轮组件、弹簧、支承板、同步带、连杆机构、行走轮、连接台,支架一端的内侧面上安装有行走驱动电机,外侧面上安装有刷头电机,清管钢刷与刷头电机连接,齿轮组件安装于支架内部并与行走驱动电机连接,连杆机构在支架的外周间隔均布安装有多个,每个连杆机构分别与齿轮组件连接,每个连杆机构的外侧端上至少间隔安装有两个行走轮,且每个连杆机构上的其中一个行走轮通过一个同步带与齿轮组件连接,支承板通过弹簧安装于支架另一端的内侧面上并与多个连杆机构依次连接,连接台一端与底部支架连接,另一端通过万向节与漏磁检测节连接。
8.进一步的,齿轮组件包括圆锥齿轮一、尾部锥齿轮、圆锥齿轮二、圆盘锥齿轮,圆盘锥齿轮与行走驱动电机的电机轴连接,圆锥齿轮二在圆盘锥齿轮周向间隔均布有多个并分别与其啮合,圆锥齿轮二的数量与连杆机构的数量相等,每个圆锥齿轮二分别通过一个齿轮轴与一个尾部锥齿轮连接,齿轮轴安装于支架上,每个连杆机构上分别安装有一个圆锥
齿轮一,每个圆锥齿轮一分别与对应的一个尾部锥齿轮啮合,每个连杆机构上的圆锥齿轮一分别通过一个同步带与其上的一个行走轮连接。
9.进一步的,连杆机构包括两根u型长杆和一根u型短杆,两根u型长杆间隔相对,两者的开口端分别与支架连接,互连端分别与行走轮连接,u型短杆的互连端分别与两根u型长杆中部连接,开口端与支承板连接。
10.进一步的,漏磁检测节包括安装法兰、漏磁套筒、漏磁检测单元,漏磁套筒的相对两端分别安装有一个安装法兰,其中一个安装法兰通过一个万向节与清管驱动节连接,另一个安装法兰通过一个万向节与计算机节连接并安装有一个支撑轮机构,漏磁检测单元在漏磁套筒的外周面上沿其周向安装有多个。
11.最佳的,漏磁检测单元包括前包覆板、耐磨垫片、导磁垫片、磁铁、轴向检测器、后包覆板、周向检测器、前弹簧片、导磁基座、后弹簧片、检测器基座,导磁基座的两端分别与前包覆板、后包覆板连接,前包覆板的底部与前弹簧片一端连接,前弹簧片另一端与漏磁套筒的外周面连接,后包覆板的底部与后弹簧片一端连接,后弹簧片另一端与漏磁套筒的外周面连接,使导磁基座沿漏磁套筒的轴向悬置,导磁基座上间隔安装有两个磁铁,每个磁铁上安装有一个耐磨垫片,两者之间设有导磁垫片,轴向检测器在两个磁铁之间安装于导磁基座上,周向检测器在检测器基座上间隔安装有两个,检测器基座在导磁基座一侧安装于漏磁套筒的外周面上并与导磁基座平行。
12.进一步的,计算机节包括两端设有法兰的计算机套筒,计算机套筒的一端上安装有里程轮,计算机套筒内设置有计算机系统,漏磁检测节与计算机系统信号连接。
13.进一步的,排灰节包括两端设有法兰的排灰套筒,以及与排灰套筒一端连通的排灰管,支撑轮机构安装于排灰套筒靠近排灰管的一端上。
14.进一步的,支撑轮机构包括多个呈圆周间隔均布的支撑轮组件,支撑轮组件包括连接杆、支撑行走轮、支撑弹簧、支撑底座,支撑底座呈l型,连接杆、支撑弹簧、支撑底座依次两两连接构成三角结构,支撑行走轮在连接杆与支撑弹簧的连接处安装于连接杆两侧,支撑底座与连接杆的连接端的外侧面与漏磁检测节或计算机节或排灰节的一端连接。
15.一种上述的船舶烟道清理检测机器人的清理检测方法,包括以下步骤:
16.步骤一:将机器人放入管道中,通过上位计算机系统控制清管驱动节工作,清管驱动节运行,清洁管内烟灰,同时驱动机构运行,带动机器人在管道内行走;
17.步骤二:由漏磁检测节产生的外加强磁场将船舶管壁饱和磁化,缺陷处的磁导率减小,磁阻增大,使得缺陷处的磁力线重新分布,部分磁通直接通过缺陷或从材料内部绕过缺陷,部分磁通会泄漏到材料表面的空间中,从而在材料表面缺陷处形成漏磁场,利用霍尔传感器获取漏磁场信号;
18.步骤三:在漏磁检测节实现对管壁的饱和磁化以及缺陷信号检测后,由计算机节对漏磁检测信号进行处理和储存,通过线缆反馈至上位计算机系统;
19.步骤四:采用负压清理技术,由排灰节将清扫下来的灰尘运输出烟管,装入烟管外的灰尘回收处理车内。
20.有益效果:与现有技术相比,本发明的优点是:具有成本低,结构简单,易维护等特性,可以彻底实现烟管道清灰的人工代替及自动化,且具备实际生产的条件。采用轴向与周向检测混合的检测方式,将轴向磁化和周向磁化的优点结合,对轴向和周向缺陷均敏感。清
管驱动节具有带主动速度控制的行走机构,能够控制调节机器人的运行速度到预期范围内,以获得最好的清灰效果和漏磁检测效果。
附图说明
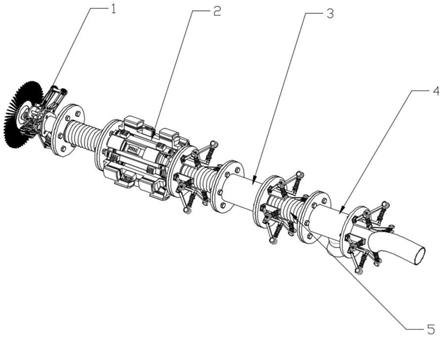
21.图1为本发明的立体结构示意图;
22.图2为本发明的侧视图;
23.图3为支撑轮组件的结构示意图;
24.图4为清管驱动节的主视结构示意图;
25.图5为齿轮组件传动方式示意图;
26.图6为清管驱动节的侧视结构示意图;
27.图7为漏磁检测节的结构示意图;
28.图8为磁铁设置及磁感线方向的示意图。
具体实施方式
29.下面结合附图和具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
30.一种船舶烟道清理检测机器人,如图1~8所示,包括万向节5、支撑轮机构8以及依次间隔排列的清管驱动节1、漏磁检测节2、计算机节3、排灰节4。
31.清管驱动节1与漏磁检测节2之间、漏磁检测节2与计算机节3之间、计算机节3与排灰节4之间分别通过一个万向节5同轴连接。
32.清管驱动节1包括清管钢刷14、刷头电机15、支架16、行走驱动电机17、齿轮组件、弹簧22、支承板23、同步带24、连杆机构25、行走轮27、连接台6,支架16一端的内侧面上安装有行走驱动电机17,外侧面上安装有刷头电机15,清管钢刷14与刷头电机15连接,齿轮组件安装于支架16内部并与行走驱动电机1连接,连杆机构25在支架16的外周间隔均布安装有多个,齿轮组件包括圆锥齿轮一18、尾部锥齿轮19、圆锥齿轮二20、圆盘锥齿轮21,圆盘锥齿轮21与行走驱动电机17的电机轴连接,圆锥齿轮二20在圆盘锥齿轮21周向间隔均布有多个并分别与其啮合,圆锥齿轮二20的数量与连杆机构25的数量相等,每个圆锥齿轮二20分别通过一个齿轮轴与一个尾部锥齿轮19连接,齿轮轴安装于支架16上,每个连杆机构25上分别安装有一个圆锥齿轮一18,每个圆锥齿轮一18分别与对应的一个尾部锥齿轮19啮合,每个连杆机构25上的圆锥齿轮一18分别通过一个同步带24与其上的一个行走轮27连接。
33.每个连杆机构25的外侧端上至少间隔安装有两个行走轮27,且每个连杆机构25上的其中一个行走轮27通过一个同步带24与齿轮组件连接,支承板23通过弹簧22安装于支架16另一端的内侧面上并与多个连杆机构25依次连接,连接台6一端与底部支架26连接,另一端通过万向节5与漏磁检测节2连接。连杆机构25包括两根u型长杆和一根u型短杆,两根u型长杆间隔相对,两者的开口端分别与支架16连接,互连端分别与行走轮27连接,u型短杆的互连端分别与两根u型长杆中部连接,开口端与支承板23连接。
34.刷头电机15由线缆提供动力,带动清管钢刷14工作,完成清灰工作,当行走驱动电机17工作时,带动圆盘锥齿轮21运动,如圆锥齿轮二20设有三个,三个圆锥齿轮二20各呈120
°
与圆盘锥齿轮21啮合,当圆盘锥齿轮21运动,通过齿轮传动,带动圆锥齿轮二20工作,
圆锥齿轮二20由齿轮轴带动尾部锥齿轮19工作,尾部锥齿轮19与圆锥齿轮一18啮合,行走驱动电机17通过齿轮传动将动力传递到圆锥齿轮一18,当行走轮27受到压力时,连杆机构25带动支承板23下压,受到弹簧22的反力推动支承板23向上,通过连杆机构25将力传递到行走轮27,确保行走轮27紧贴管壁,圆锥齿轮一18通过同步带24连接到行走轮27,通过同步带24传动将动力传递到行走轮27上,驱动整体机构行走。
35.漏磁检测节2包括安装法兰28、漏磁套筒36、漏磁检测单元,漏磁套筒36的相对两端分别安装有一个安装法兰28,其中一个安装法兰28通过一个万向节5与清管驱动节1连接,另一个安装法兰28通过一个万向节5与计算机节3连接并安装有一个支撑轮机构8,漏磁检测单元在漏磁套筒36的外周面上沿其周向安装有多个。漏磁检测单元包括前包覆板29、耐磨垫片30、导磁垫片31、磁铁32、轴向检测器33、后包覆板34、周向检测器35、前弹簧片37、导磁基座38、后弹簧片39、检测器基座,导磁基座38的两端分别与前包覆板29、后包覆板34连接,前包覆板29的底部与前弹簧片37一端连接,前弹簧片37另一端与漏磁套筒36的外周面连接,后包覆板34的底部与后弹簧片39一端连接,后弹簧片39另一端与漏磁套筒36的外周面连接,使导磁基座38沿漏磁套筒36的轴向悬置,导磁基座38上间隔安装有两个磁铁32,每个磁铁32上安装有一个耐磨垫片30,两者之间设有导磁垫片31,轴向检测器33在两个磁铁32之间安装于导磁基座38上,周向检测器35在检测器基座上间隔安装有两个,检测器基座在导磁基座38一侧安装于漏磁套筒36的外周面上并与导磁基座38平行。轴向检测器33与周向检测器35均为霍尔传感器。
36.计算机节3包括两端设有法兰的计算机套筒,计算机套筒的一端上安装有里程轮,计算机套筒内设置有计算机系统,漏磁检测节2与计算机系统信号连接。里程轮记录机器人行走的距离,里程轮与管道内壁滚动摩擦,避免计算机节外壁遭受磨损,计算机系统与漏磁检测单元中的轴向检测器33,周向检测器35相连接,通过线缆与上位计算机系统进行连接。
37.排灰节4包括两端设有法兰的排灰套筒,以及与排灰套筒一端连通的排灰管9,支撑轮机构8安装于排灰套筒靠近排灰管9的一端上。排灰管9采用负压技术,将清管驱动节1清扫下来的烟灰集中运输出烟管,装入烟管外的灰尘回收车中。
38.漏磁检测节2、计算机节3、排灰节4同侧的一端上分别安装有一个支撑轮机构8。
39.支撑轮机构8包括多个呈圆周间隔均布的支撑轮组件7,支撑轮组件7包括连接杆10、支撑行走轮11、支撑弹簧12、支撑底座13,支撑底座13呈l型,连接杆10、支撑弹簧12、支撑底座13依次两两连接构成三角结构,支撑行走轮11在连接杆10与支撑弹簧12的连接处安装于连接杆10两侧,支撑底座13与连接杆10的连接端的外侧面与漏磁检测节2或计算机节3或排灰节4的一端连接。排灰节端部安装法兰设置有支撑轮组件7,通过支撑轮组件7与管道内壁的滚动摩擦,减少运行阻力。漏磁检测节端部安装法兰28上设置有支撑轮组件7,通过支撑轮组件7与管道内壁的滚动摩擦,减少运行阻力。当支撑行走轮11受到压力时,支撑弹簧12压缩,实现变径,通过支撑行走轮11与管道内壁滚动摩擦,减少运行阻力的同时,避免各节外壁遭受磨损。
40.漏磁检测单元磁铁块安置方向如图7、8所示,磁感线方向从n级指向s级,通过磁铁块位置的交错安置,在管道内形成轴向磁感线及周向磁感线,若轴向方向管壁有缺陷,部分磁感线泄漏到管壁周围的空气中,形成漏磁场,由轴向检测器检测缺陷处空气中的漏磁场,从而获得轴向管壁缺陷的情况,若周向方向管壁有缺陷,部分磁感线泄漏到管壁周围的空
气中,形成漏磁场,由周向检测器检测缺陷处空气中的漏磁场,从而获得周向管壁缺陷的情况。
41.上述的船舶烟道清理检测机器人的检测方法,包括以下步骤:
42.步骤一:将机器人放入管道中,通过上位计算机系统控制清管驱动节工作,清管驱动节运行,清洁管内烟灰,同时驱动机构运行,带动机器人在管道内行走;
43.步骤二:由漏磁检测节产生的外加强磁场将船舶管壁饱和磁化,缺陷处的磁导率减小,磁阻增大,使得缺陷处的磁力线重新分布,部分磁通直接通过缺陷或从材料内部绕过缺陷,部分磁通会泄漏到材料表面的空间中,从而在材料表面缺陷处形成漏磁场,利用霍尔传感器获取漏磁场信号;
44.步骤三:在漏磁检测节实现对管壁的饱和磁化以及缺陷信号检测后,由计算机节对漏磁检测信号进行处理和储存,通过线缆反馈至上位计算机系统;
45.步骤四:采用负压清理技术,由排灰节将清扫下来的灰尘运输出烟管,装入烟管外的灰尘回收处理车内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1