机载激光雷达点云生成方法及系统与流程
1.本发明涉及机载激光雷达,特别涉及机载激光雷达点云生成方法及系统。
背景技术:
2.机载激光雷达系统包括三大传感器设备:gnss单元、imu单元和激光雷达,其中gnss单元用于确定激光发射点的位置信息;imu单元用于测量激光发射瞬间激光的姿态信息;激光雷达设备以脉冲激光测距作为主要技术手段,以激光束扫描的工作方式测量从传感器到地物对象的激光照射点间的距离,同时还可以获得反射率、激光脉冲回波次数等信息。目前,机载激光雷达系统点云生成的具体流程为:gnss单元使用rtk技术和imu系统进行融合,形成组合导航系统,计算出位姿信息;基于组合导航系统计算出的位姿信息,结合激光雷达系统获取的激光点距离信息,经过一系列空间变换,得出激光脚点在当地水平坐标系下的三维坐标,即一系列离散的、空间分布不规则的三维点云数据,所述激光脚点指激光落在物体表面的光点。
3.整个点云生成过程是线性过程,即点云的形成是完全基于组合导航系统计算出的位姿信息,如果组合导航计算出的位姿信息误差过大,那么点云精度将急剧降低,因此,现有技术存在以下问题:1、如果卫星信号出现遮挡而无法进行rtk计算,将无法生成点云信息;2、如果卫星信息变弱或者因环境因素导致imu的精度降低,组合导航计算出的位姿信息误差偏大,那么点云精度将降低。
技术实现要素:
4.本发明所解决的技术问题:提供一种机载激光雷达点云生成方法及系统,解决现有的机载激光雷达生成的点云数据精度受卫星信号和环境因素影响过大的问题。
5.本发明解决上述技术问题采用的技术方案:机载激光雷达点云生成方法,包括以下步骤:
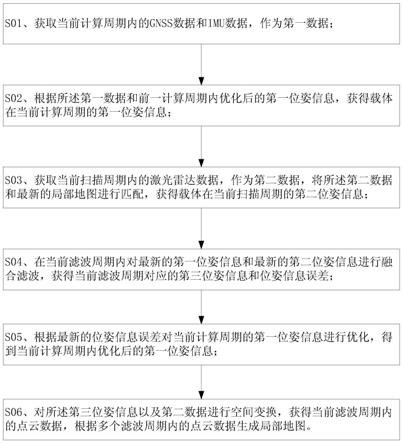
6.s01、获取当前计算周期内的gnss数据和imu数据,作为第一数据;
7.s02、根据所述第一数据和前一计算周期内优化后的第一位姿信息,获得载体在当前计算周期的第一位姿信息;
8.s03、获取当前扫描周期内的激光雷达数据,作为第二数据,将所述第二数据和最新的局部地图进行匹配,获得载体在当前扫描周期的第二位姿信息;
9.s04、在当前滤波周期内对最新的第一位姿信息和最新的第二位姿信息进行融合滤波,获得当前滤波周期对应的第三位姿信息和位姿信息误差;
10.s05、根据最新的位姿信息误差对当前计算周期的第一位姿信息进行优化,得到当前计算周期内优化后的第一位姿信息;
11.s06、对所述第三位姿信息以及第二数据进行空间变换,获得当前滤波周期内的点云数据,根据多个滤波周期内的点云数据生成局部地图。
12.进一步的,所述位姿信息包括载体姿态和位置信息。
13.进一步的,步骤s03中,所述第二数据和局部地图进行匹配采用ndt匹配技术。
14.进一步的,步骤s04中,所述融合滤波采用kalman滤波算法。
15.进一步的,步骤s06中,所述多个滤波周期为当前滤波周期前连续n个滤波周期,所述n为预设正整数。
16.机载激光雷达系统,包括组合导航模块、点云数据生成模块、激光雷达单元和滤波单元,所述组合导航模块包括gnss单元和imu单元;
17.所述组合导航模块在当前计算周期内,获取gnss单元和imu单元采集到的数据,作为第一数据,根据所述第一数据和前一计算周期内优化后的第一位姿信息,计算获得载体在当前计算周期的第一位姿信息,将所述第一位姿信息发送给滤波单元,接收滤波单元反馈的位姿信息误差,并根据滤波单元反馈的最新位姿信息误差对当前计算周期的第一位姿信息进行优化,得到当前计算周期内优化后的第一位姿信息;
18.所述激光雷达单元获取当前扫描周期内的激光雷达数据,作为第二数据,将所述第二数据和最新的局部地图进行匹配,获得载体在当前扫描周期的第二位姿信息,将所述第二数据发送给点云数据生成模块,将所述第二位姿信息发送给滤波单元;
19.所述滤波单元在当前滤波周期内对最新的第一位姿信息和最新的第二位姿信息进行融合滤波,获得当前滤波周期对应的第三位姿信息和位姿信息误差,将所述第三位姿信息发送给点云数据生成模块,将所述位姿信息误差发送给组合导航模块;
20.所述点云数据生成模块根据对所述第三位姿信息以及第二数据进行空间变换,获得当前滤波周期内的点云数据,根据多个滤波周期内的点云数据生成局部地图,将所述局部地图发送给激光雷达单元。
21.进一步的,所述位姿信息包括载体姿态和位置信息。
22.进一步的,所述激光雷达单元将所述第二数据和最新的局部地图进行匹配采用ndt匹配技术。
23.进一步的,所述滤波单元采用kalman滤波算法。
24.进一步的,所述多个滤波周期为当前滤波周期前连续n个滤波周期,所述n为预设正整数。
25.本发明的有益效果:本发明机载激光雷达点云生成方法及系统,通过当前计算周期内的gnss数据和imu数据,并结合前一计算周期内优化后的第一位姿信息,获得当前周期的第一位姿信息,通过将激光雷达数据和局部地图进行匹配,获得第二位姿信息,在当前滤波周期内对最新的第一位姿信息和最新的第二位姿信息进行融合滤波,获得当前滤波周期对应的第三位姿信息和位姿信息误差,对所述第三位姿信息以及第二数据进行空间变换,获得当前滤波周期内的点云数据,根据多个滤波周期内的点云数据生成局部地图,解决了机载激光雷达生成的点云数据精度受卫星信号和环境因素影响过大的问题。本发明与现有技术相比,利用位姿信息误差对第一位姿信息进行优化,利用局部地图与激光雷达数据进行匹配,减少了卫星信号和环境因素对点云数据的影响,提高了点云数据的精度。
附图说明
26.附图1是本发明机载激光雷达点云生成方法及系统的方法流程示意图。
具体实施方式
27.本发明中的机载激光雷达点云生成方法如附图1所述,包括以下步骤:
28.s01、获取当前计算周期内的gnss数据和imu数据,作为第一数据;
29.s02、根据所述第一数据和前一计算周期内优化后的第一位姿信息,获得载体在当前计算周期的第一位姿信息;
30.具体的,所述位姿信息包括载体姿态和位置信息。
31.s03、获取当前扫描周期内的激光雷达数据,作为第二数据,将所述第二数据和最新的局部地图进行匹配,获得载体在当前扫描周期的第二位姿信息;
32.具体的,所述第二数据和局部地图进行匹配采用ndt匹配技术。
33.s04、在当前滤波周期内对最新的第一位姿信息和最新的第二位姿信息进行融合滤波,获得当前滤波周期对应的第三位姿信息和位姿信息误差;
34.具体的,所述融合滤波采用kalman滤波算法。
35.s05、根据最新的位姿信息误差对当前计算周期的第一位姿信息进行优化,得到当前计算周期内优化后的第一位姿信息;
36.s06、对所述第三位姿信息以及第二数据进行空间变换,获得当前滤波周期内的点云数据,根据多个滤波周期内的点云数据生成局部地图。
37.具体的,所述多个滤波周期为当前滤波周期前连续n个滤波周期,所述n为预设正整数。
38.本发明中的机载激光雷达系统包括组合导航模块、点云数据生成模块、激光雷达单元和滤波单元,所述组合导航模块包括gnss单元和imu单元;
39.所述组合导航模块在当前计算周期内,获取gnss单元和imu单元采集到的数据,作为第一数据,根据所述第一数据和前一计算周期内优化后的第一位姿信息,计算获得载体在当前计算周期的第一位姿信息,将所述第一位姿信息发送给滤波单元,接收滤波单元反馈的位姿信息误差,并根据滤波单元反馈的最新位姿信息误差对当前计算周期的第一位姿信息进行优化,得到当前计算周期内优化后的第一位姿信息;
40.具体的,所述位姿信息包括载体姿态和位置信息。
41.所述激光雷达单元获取当前扫描周期内的激光雷达数据,作为第二数据,将所述第二数据和最新的局部地图进行匹配,获得载体在当前扫描周期的第二位姿信息,将所述第二数据发送给点云数据生成模块,将所述第二位姿信息发送给滤波单元;
42.具体的,所述第二数据和最新的局部地图进行匹配采用ndt匹配技术。
43.所述滤波单元在当前滤波周期内对最新的第一位姿信息和最新的第二位姿信息进行融合滤波,获得当前滤波周期对应的第三位姿信息和位姿信息误差,将所述第三位姿信息发送给点云数据生成模块,将所述位姿信息误差发送给组合导航模块;
44.具体的,所述滤波单元采用kalman滤波算法。
45.所述点云数据生成模块根据对所述第三位姿信息以及第二数据进行空间变换,获得当前滤波周期内的点云数据,根据多个滤波周期内的点云数据生成局部地图,将所述局部地图发送给激光雷达单元。
46.具体的,所述多个滤波周期为当前滤波周期前连续n个滤波周期,所述n为预设正整数。
47.对本发明中的所有周期作进一步说明,计算周期为组合导航模块计算一次位姿信息的时间,扫描周期为激光雷达单元扫描一周或多周所用的时间,滤波周期为生成点云数据的间隔时间。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1