一种基于视觉的随船海浪观测装置及方法与流程
1.本发明涉及波浪检测装备技术领域,尤其是一种基于视觉的随船海浪观测装置及方法。
背景技术:
2.在水面应用方面,船舶航行时需要对海上环境(波浪)进行监测,而现有技术中的随船监测手段主要依靠雷达进行监测,但雷达测波装置测量精度较低,且造价昂贵,所以缺少精准的随船测波手段。机器视觉测波技术可以实现对波浪参数的准确测量,但测量精度受光照反射、载体平台运动的影响较大,从而导致其应用的局限性。
技术实现要素:
3.本技术人针对上述现有生产技术中的缺点,提供一种结构合理的一种基于视觉的随船海浪观测装置及方法,从而利用自研的运动补偿平台及算法解决了光测手段只能在白天定点对波浪测量的问题,提高了随船测量精度,造价便宜。
4.本发明所采用的技术方案如下:
5.一种基于视觉的随船海浪观测装置,包括与船体桅杆固定的安装件,所述安装件的顶面通过轴承安装板固定有航向电机,所述航向电机顶面通过法兰安装有航向轴结构件,所述航向轴结构件呈折弯结构,并在航向轴结构件的端头内侧通过法兰安装横滚电机,横滚电机的输出端通过法兰固定有横滚轴结构件,所述横滚轴结构件的内侧安装有俯仰电机,俯仰电机的外部通过法兰固定有俯仰轴结构件,所述俯仰轴结构件位于横滚轴结构件的内部,所述俯仰轴结构件的外侧顶面位置固定有稳定连接件,所述稳定连接件的两端分别安装有连接杆,所述连接杆的外头通过法兰盘安装有相机防护外壳,位于相机防护外壳的内部设置有匹配轮,匹配轮,上安装有相机镜头,与匹配轮配合安装有光圈控制齿轮和焦距控制齿轮;位于稳定连接件的顶面还设置有gps。
6.其进一步技术方案在于:
7.所述安装件呈圆台型结构。
8.所述横滚轴结构件呈“u”型结构。
9.所述俯仰轴结构件呈“u”型结构。
10.所述相机防护外壳呈中空长方体结构,并在相机防护外壳的前端设置有机玻璃。
11.所述连接杆的两端均安装有法兰盘,所述稳定连接件的两端设置有与法兰盘配合的安装孔,所述相机防护外壳的内侧设置有与法兰盘配合的连接孔。
12.所述gps的两端分别安装有支撑架,支撑架固定在对应的法兰盘的外部。
13.一种基于视觉的随船海浪观测方法,包括如下操作步骤:
14.第一步:随船波浪观测装置启动;
15.第二步:霍尔元件触发,控制器解算脉冲信息平衡回到预设点;
16.第三步:判断是否有控制指令输入,没有则利用传感器采集偏差,控制器解算姿
态,输出修正角度,并利用gps输入作为定位修正,从而控制电机转动;如有控制指令输入,则控制器直接解算指令,输出pwm控制,驱动电机转动;第四步:利用算法识别时间段,控制器调控光圈大小,保证匹配精度;
17.第五步:双目相机采集波浪图片,双目ccd相机开启工作;
18.第六步:图像预处理,利用图像滤波算法、图像去雾算法实现图像噪声去除,波浪细节增强;
19.第七步:图相匹配,利用harris算法提取特征点,并利用surf快速匹配算法实现波浪特征匹配;
20.第八步:误匹配点识别,设定核线计算双目匹配对到核线的距离差的绝对值,并设定阈值,判断阈值与距离差绝对值的关系,大于阈值则认为为错误匹配点,进行剔除;
21.第九步:计算基平面,建立平面方程,利用250张平静海面图片计算相机坐标系下的坐标,并利用间接差分的方法求解方程未知量,从而建立相机坐标系到目标坐标系的转换关系;
22.第十步:波浪参数反演,利用步骤九建立的转换关系,确定参考零点,z轴坐标的变化代表瞬时波高的变化,周期利用傅里叶变换,结合能量谱求解,波向则依靠建立等高线图,确定波峰运动方向,进行统计确定主波向。
[0023][0024]
其中:
[0025]
f为镜头焦距,单位为mm;
[0026]
z为测量距离,单位为m;
[0027]
b为双目相机基线长度,单位mm;
[0028]
dx为相机像元大小,单位为um;
[0029]
d为视差;
[0030]
视场大小与视场角及测量距离有关,匹配区域为扇形区域,计算公式如下:
[0031][0032]
式中:
[0033]
s为视场大小,单位为
㎡
;
[0034]rmax
为测量的最远距离,单位为m;
[0035]rmin
为测量的最近距离,单位为m;
[0036]
α为相机的视场角,单位为
°
;
[0037]
相机可测视场为s,我们取中心区域1/2s,则在保证视场不变的情况下,横摇运动范围为:
[0038]
[0039]
纵摇运动范围为:
[0040][0041]
其中:
[0042]
s为相机视场大小,
[0043]
a为视场的长,
[0044]
b为视场的宽,
[0045]
a与b的比例与相机分辨率比率相同,视场中心点坐标为双目相机光心与基平面交点。
[0046]
第十二步,波浪场重构,利用第十步得到的特征点三维坐标进行网格化处,
[0047]
确定网格区域大小,利用平面方程进行拟合处理,从而实现波浪场重构。
[0048]
本发明的有益效果如下:
[0049]
本发明结构紧凑、合理,操作方便,可以整体安装于船体桅杆,不占用空间,不需要破坏船体本身结构,操作方法简便,由于视觉系统进行测量,从而具有较低的成本和较精确的测量精度,并解决了测量时间、随船运动的局限性,实现了低成本、低功耗、高精度测量的波浪参数监测。
附图说明
[0050]
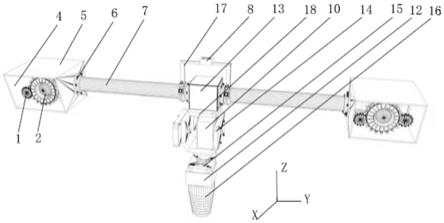
图1为本发明的结构示意图。
[0051]
图2为本发明另一视角的结构示意图。
[0052]
图3为本发明的爆炸图。
[0053]
图4为本发明测试方法的流程图。
[0054]
其中:1、光圈控制齿轮;2、匹配轮;3、焦距控制齿轮;4、有机玻璃;5、相机防护外壳;6、法兰盘;7、连接杆;8、gps;9、连接孔;10、俯仰电机;11、横滚电机;12、航向电机;13、稳定连接件;14、横滚轴结构件;15、航向轴结构件;16、安装件;17、支撑架;18、俯仰轴结构件。
具体实施方式
[0055]
下面结合附图,说明本发明的具体实施方式。
[0056]
如图1-图4所示,本实施例的基于视觉的随船海浪观测装置,包括与船体桅杆固定的安装件16,安装件16的顶面通过轴承安装板固定有航向电机12,航向电机12顶面通过法兰安装有航向轴结构件15,航向轴结构件15呈折弯结构,并在航向轴结构件15的端头内侧通过法兰安装横滚电机11,横滚电机11的输出端通过法兰固定有横滚轴结构件14,横滚轴结构件14的内侧安装有俯仰电机10,俯仰电机10的外部通过法兰固定有俯仰轴结构件18,俯仰轴结构件18位于横滚轴结构件14的内部,俯仰轴结构件18的外侧顶面位置固定有稳定连接件13,稳定连接件13的两端分别安装有连接杆7,连接杆7的外头通过法兰盘6安装有相机防护外壳5,位于相机防护外壳5的内部设置有匹配轮2,匹配轮2,上安装有相机镜头,与匹配轮2配合安装有光圈控制齿轮1和焦距控制齿轮3;位于稳定连接件13的顶面还设置有gps8。
[0057]
安装件16呈圆台型结构。
[0058]
横滚轴结构件14呈“u”型结构。
[0059]
俯仰轴结构件18呈“u”型结构。
[0060]
相机防护外壳5呈中空长方体结构,并在相机防护外壳5的前端设置有机玻璃4。
[0061]
连接杆7的两端均安装有法兰盘6,稳定连接件13的两端设置有与法兰盘6配合的安装孔,相机防护外壳5的内侧设置有与法兰盘6配合的连接孔9。
[0062]
gps8的两端分别安装有支撑架17,支撑架17固定在对应的法兰盘6的外部。
[0063]
本实施例的基于视觉的随船海浪观测方法,包括如下操作步骤:
[0064]
第一步:随船波浪观测装置启动;
[0065]
第二步:霍尔元件触发,控制器解算脉冲信息平衡回到预设点;
[0066]
第三步:判断是否有控制指令输入,没有则利用传感器采集偏差,控制器解算姿态,输出修正角度,并利用gps8输入作为定位修正,从而控制电机转动;如有控制指令输入,则控制器直接解算指令,输出pwm控制,驱动电机转动;第四步:利用算法识别时间段,控制器调控光圈大小,保证匹配精度;
[0067]
第五步:双目相机采集波浪图片,双目ccd相机开启工作;
[0068]
第六步:图像预处理,利用图像滤波算法、图像去雾算法实现图像噪声去除,波浪细节增强;
[0069]
第七步:图相匹配,利用harris算法提取特征点,并利用surf快速匹配算法实现波浪特征匹配;
[0070]
第八步:误匹配点识别,设定核线计算双目匹配对到核线的距离差的绝对值,并设定阈值,判断阈值与距离差绝对值的关系,大于阈值则认为为错误匹配点,进行剔除;
[0071]
第九步:计算基平面,建立平面方程,利用250张平静海面图片计算相机坐标系下的坐标,并利用间接差分的方法求解方程未知量,从而建立相机坐标系到目标坐标系的转换关系;
[0072]
第十步:波浪参数反演,利用步骤九建立的转换关系,确定参考零点,z轴坐标的变化代表瞬时波高的变化,周期利用傅里叶变换,结合能量谱求解,波向则依靠建立等高线图,确定波峰运动方向,进行统计确定主波向。
[0073][0074]
其中:
[0075]
f为镜头焦距,单位为mm;
[0076]
z为测量距离,单位为m;
[0077]
b为双目相机基线长度,单位mm;
[0078]
dx为相机像元大小,单位为um;
[0079]
d为视差;
[0080]
视场大小与视场角及测量距离有关,匹配区域为扇形区域,计算公式如下:
[0081][0082]
式中:
[0083]
s为视场大小,单位为
㎡
;
[0084]rmax
为测量的最远距离,单位为m;
[0085]rmin
为测量的最近距离,单位为m;
[0086]
α为相机的视场角,单位为
°
;
[0087]
相机可测视场为s,我们取中心区域1/2s,则在保证视场不变的情况下,
[0088]
横摇运动范围为:
[0089][0090]
纵摇运动范围为:
[0091][0092]
其中:
[0093]
s为相机视场大小,
[0094]
a为视场的长,
[0095]
b为视场的宽,
[0096]
a与b的比例与相机分辨率比率相同,视场中心点坐标为双目相机光心与基平面交点。
[0097]
第十二步,波浪场重构,利用第十步得到的特征点三维坐标进行网格化处,
[0098]
确定网格区域大小,利用平面方程进行拟合处理,从而实现波浪场重构。
[0099]
本发明的具体结构和功能如下:
[0100]
其中,基于视觉的随船波浪观测装置的具体结构为:
[0101]
主要包括固定在船体桅杆的安装件16,航向电机12与安装件16的轴承安装板相连,保证电机强度的同时对电机底部进行密封。航向电机12通过法兰与航向轴结构件15连接,使其可以绕z轴方向旋转。
[0102]
航向轴结构件15的另一端与横滚电机11通过法兰相连,横滚电机11驱动横滚轴结构件14,使相机能在x轴方向旋转,来进行对x方向的角度补偿。
[0103]
俯仰电机10与横滚轴结构件14相连,俯仰电机10通过法兰与俯仰轴结构件18相连,从而补偿沿y方向的偏转角度,保护套是用来保护电机,防止海水,或其他异物入侵,从而可提高电机的寿命。
[0104]
相机防护外壳5是由钣金件与有机玻璃组合,有机玻璃采用特殊材质,防止雨水黏连在观测面,为增加钣金的刚度与屈服强度,在每个钣金件进行弯折小部分。
[0105]
随船波浪观测装置采用模块化设计,分为相机模块、连杆模块、结构件模块以及安装基座模块,可以根据实际应用场景、地点选择不同参数、不同大小、不同长度的相机、连杆
等模块,方便携带,便于组装。
[0106]
本发明所述的基于视觉的随船波浪观测装置各部件的作用如下:
[0107]
光圈控制齿轮1,用于控制镜头光圈大小,利用双目相机采集到的波浪图像进行匹配,当光强过强或过弱时,会导致特征点匹配个数减少,利用深度学习训练,得到不同时间下光圈大小雨特征点个数的最优关系,并利用控制器驱动光圈齿轮,自动调整光圈大小。
[0108]
匹配轮2,匹配轮2包括光圈匹配轮与焦距匹配轮,并安装有相机镜头,用于光圈控制轮与焦距控制轮联动,从而调整光圈及焦距大小,双目相机用于实时采集波浪图像。
[0109]
焦距控制齿轮3,用于控制焦距大小。
[0110]
有机玻璃4,为相机观测面,通过特殊材料以及斜面设计,保证在雨天情况下无水珠黏连在观测面,从而影响相机观测。
[0111]
相机防护外壳5,用于实现相机的环境保护及密封。
[0112]
法兰盘6,用于实现相机防护外壳5与连接杆7之间的连接。
[0113]
连接杆7,用于保证双目基线长度,因双目系统要实现远距离观测,结合双目测距原理及相机参数,确定实际应用连杆长度。
[0114]
gps 8,用于实时获取云台的位姿信息,为控制系统提供反馈信号,与摆臂固连在一起,随摆臂三个方向转动,其引线经引线管进入摆臂中。
[0115]
法兰盘连接孔9,用于固定法兰盘6与相机防护外壳5。
[0116]
俯仰电机10,实现绕y轴驱动旋转。
[0117]
横滚电机11,实现绕x轴驱动旋转。
[0118]
航向电机12,实现绕z轴驱动旋转。
[0119]
上述各电机外部均安装有保护外壳,保护外壳用于电机防盐防腐。
[0120]
稳定连接件13,用于固定两个连接杆7与引线管,并与横滚结构件固定;
[0121]
俯仰结构件14,用于连接俯仰电机与横滚电机;
[0122]
航向结构件15,用于连接航向电机与横滚电机;
[0123]
安装件16,安装于船体或者平台桅杆处。
[0124]
本发明所述的方法可用于船舶航行的波浪监测场景,也可用于其他监测场景如移动式平台、海上浮式平台等,本发明实施例对此不作具体限定,以下以船舶航行的监测场景为例对本发明实施例的相关内容进行说明,该方法的执行主体可以为设置于监测船舶航行海域的波浪测量装置。
[0125]
以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1