一种植物三维模型重建系统及方法
1.本发明涉及植物三维建模应用技术领域,尤其是涉及一种植物三维模型重建系统及方法。
背景技术:
2.植物三维建模是农学、地学、生物学、植物学、生态学等领域的研究热点之一。近年来,伴随计算机图形学、数学、机器视觉和虚拟现实技术的快速发展,虚拟植物三维建模和真实植物三维建模技术得到普遍关注。建立的植物三维模型,可用于虚拟农田实验与管理、虚拟害虫在作物群体中的藏匿和取食规律并进行疾病预测、虚拟土壤养分及水分变化,为农业管理人员提供对整个生命周期中植物发育的详细和全面的了解;也可以测量和表征复杂的植物形状,提取作物冠层的叶面积、株高等结构参数,从而进一步表征果实质量、区分杂草和作物、研究作物长势和对产量进行估测。
3.激光雷达是近几年来国内外学者进行植物三维建模的新设备。基于激光雷达数据的植物三维建模主要分两类:模型驱动法和数据驱动法。模型驱动法需事先建立一个具有特定结构和参数定义的植物模型库,通过将提取出的植物结构参数与模型库中的模型进行比较匹配,以此来描述单株植物和群体植物的几何特征并进行三维重建,这种方法速度快,但难以完全表达植株的真实形状;数据驱动法则是直接利用已有数据来提取植物的各种参数特征,并进行结构三维重建,这种方法建模精度高,但速度慢,且容易受叶片之间互相遮挡而产生数据缺失。
4.综上所述,现有植物三维模型重建方法存在精度较低、重建速度较慢等问题,难以完全表达植物表型信息,因此,发明一种精准快速的植物三维模型重建系统及方法是非常有必要的。
技术实现要素:
5.本发明的目的是提供一种植物三维模型重建系统及方法,利用滑台模组和转台搭建了一个适合激光雷达采集植物三维点云数据的系统结构,重建速度快,误差较小,精度较高。
6.为实现上述目的,本发明提供了一种植物三维模型重建系统,包括背景板横向移动机构、激光雷达横向移动机构和激光雷达纵向移动机构,所述激光雷达纵向移动机构与所述激光雷达横向移动机构连接,所述激光雷达横向移动机构与所述背景板横向移动机构之间设置有放置待测植物的电控旋转台;
7.所述背景板横线移动机构包括第一滑台模组、在所述第一滑台模组上滑动的背景板和控制所述背景板滑动的第一步进电机,所述第一步进电机固定在所述第一滑台模组的端部;
8.所述激光雷达横向移动机构包括第二滑台模组、在所述第二滑台模组上滑动的滑动座和控制所述滑动座滑动的第二步进电机,所述第二步进电机固定在所述第二滑台模组
的端部;
9.所述激光雷达纵向移动机构包括固定在所述滑动座上的第三滑台模组、在所述第三滑台模组上滑动的支撑台和控制所述支撑台上下滑动的第三步进电机,所述第三步进电机固定在所述第三滑台模组的底端一侧,所述支撑台上固定有激光雷达。
10.优选的,所述电控旋转台通过底座固定在所述第一滑台模组和所述第二滑台模组相邻端的边缘。
11.优选的,所述背景板的底端设置有滑动架,所述滑动架在所述第一滑台模组上滑动。
12.优选的,所述第三滑台模组固定在所述滑动座的中心位置处。
13.一种植物三维模型重建方法,包括以下步骤:
14.s1、将待测植物提前放置于电控旋转台上,并通过控制器驱动第一步进电机和第二步进电机调整植物与背景板、植物与激光雷达之间的距离以达到合适位置;
15.s2、将激光雷达固定在支撑台上,通过控制器驱动第三步进电机,带动激光雷达向上移动扫描待测植物表面结构,当到达顶部后,激光雷达停止扫描,电控旋转台旋转180度,再次控制第三步进电机使激光雷达向下移动采集数据,直到到达底部;
16.s3、将获取的数据通过串口传输至计算机,进行存储,并处理激光雷达获取的点云数据;
17.s4、生成植物三维模型,首先进行坐标变换,其次点云数据滤波。
18.优选的,所述步骤s4中坐标变换具体包括以下步骤:
19.根据搭建的数据采集系统建立坐标系,以激光雷达初始位置中心为坐标原点,x轴方向为0度角方向,y轴方向为90度角方向,竖直向上方为z轴方向,激光雷达获取数据为激光雷达到目标点的直线距离d以及与激光雷达旋转角度θ,根据公式(1)和公式(2)可以计算出电控旋转台旋转前目标点的坐标(x,y,z),
[0020][0021][0022]
上式中,f为脉冲频率;θr为电机步距角,根据电机型号确定;x为细分倍数;s为直线模组导程,即电机转过一周模组行进距离,即电机转过一周激光雷达移动距离;t为时间。
[0023]
根据公式(3)可以计算电控旋转台旋转后目标点的坐标,
[0024]
[0025]
上式中,r为转台中心点到激光雷达的直线距离。
[0026]
优选的,所述步骤s4中点云数据滤波具体包括以下步骤:
[0027]
(1)激光雷达采集电控旋转台上植株点云数据,只需要特定角度范围内,首先采用条件滤波器过滤范围外无用点,已知背景板长度s,激光雷达到背景板距离为l,则可根据条件:x∈(0,s),提取植株点云数据,在这个范围外的点将作为无用点被去除;
[0028]
(2)激光雷达产生的点云数据集接收到的错误回波信号,在滤波处理中将点云中的离群点及噪点进行去除,对后续点云数据进行处理。
[0029]
优选的,所述滤波的具体方法为在植株点云数据中,对所有点云进行邻域计算,计算每个点与其k邻域之间的距离集合,k的取值可以通过公式(4)得到,再根据公式(5)计算所有点到其k邻域距离的均值μ与标准差σ,则距离阈值d
max
可表示为d
max
=μ+α
×
σ,α是比例系数,根据植株叶片及冠层特点得到,对所有点云进行处理,对比剔除与k个邻居点的平均距离大于d
max
的点,
[0030][0031]
上式中,θ为激光雷达最小扫描角度;l为激光雷达两扫描点间的距离;l1为植株叶片最小尺寸,l2为植株叶片最大尺寸;λ为调整系数,受植物叶片及冠层特点影响;
[0032][0033]
上式中,n表述有效点云个数;
[0034]
经过滤波之后,保留下的点的集合即为想要的植株三维点云模型。
[0035]
因此,本发明采用上述结构的一种植物三维模型重建系统及方法,利用滑台模组和转台搭建了一个适合激光雷达采集植物三维点云数据的系统结构,重建速度快,误差较小,精度较高。
[0036]
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
[0037]
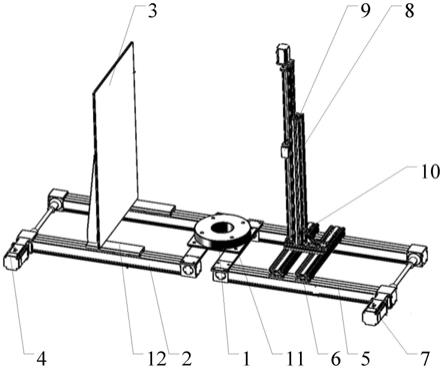
图1为本发明一种植物三维模型重建系统的结构示意图;
[0038]
图2为本发明一种植物三维模型重建方法的流程图。
具体实施方式
[0039]
以下通过附图和实施例对本发明的技术方案作进一步说明。
[0040]
除非另外定义,本发明使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
[0041]
实施例
[0042]
图1为本发明一种植物三维模型重建系统的结构示意图,如图所示,本发明提供了一种植物三维模型重建系统,包括背景板横向移动机构、激光雷达横向移动机构和激光雷达纵向移动机构,激光雷达纵向移动机构与激光雷达横向移动机构连接,激光雷达横向移动机构与背景板横向移动机构之间设置有放置待测植物的电控旋转台1;背景板横线移动机构包括第一滑台模组2、在第一滑台模组2上滑动的背景板3和控制背景板3滑动的第一步进电机4,第一步进电机4固定在第一滑台模组2的端部。激光雷达横向移动机构包括第二滑台模组5、在第二滑台模组5上滑动的滑动座6和控制滑动座6滑动的第二步进电机7,第二步进电机7固定在第二滑台模组5的端部。激光雷达纵向移动机构包括固定在滑动座6上的第三滑台模组8、在第三滑台模组8上滑动的支撑台9和控制支撑台9上下滑动的第三步进电机10,第三步进电机10固定在第三滑台模组8的底端一侧,支撑台9上固定有激光雷达。
[0043]
电控旋转台1通过底座11固定在第一滑台模组2和第二滑台模组5相邻端的边缘。背景板3的底端设置有滑动架12,滑动架12在第一滑台模组2上滑动。第三滑台模组8固定在滑动座6的中心位置处。
[0044]
图2为本发明一种植物三维模型重建方法的流程图,如图所述,一种植物三维模型重建方法,包括以下步骤:
[0045]
s1、将待测植物提前放置于电控旋转台上,并通过控制器驱动第一步进电机和第二步进电机调整植物与背景板、植物与激光雷达之间的距离以达到合适位置。
[0046]
s2、将激光雷达固定在支撑台上,通过控制器驱动第三步进电机,带动激光雷达向上移动扫描待测植物表面结构,当到达顶部后,激光雷达停止扫描,电控旋转台旋转180度,再次控制第三步进电机使激光雷达向下移动采集数据,直到到达底部。
[0047]
s3、将获取的数据通过串口传输至计算机,进行存储,并处理激光雷达获取的点云数据。
[0048]
s4、生成植物三维模型,首先进行坐标变换,其次点云数据滤波。
[0049]
坐标变换具体包括以下步骤:
[0050]
根据搭建的数据采集系统建立坐标系,以激光雷达初始位置中心为坐标原点,x轴方向为0度角方向,y轴方向为90度角方向,竖直向上方为z轴方向,激光雷达获取数据为激光雷达到目标点的直线距离d以及与激光雷达旋转角度θ,根据公式(1)和公式(2)可以计算出电控旋转台旋转前目标点的坐标(x,y,z),
[0051][0052][0053]
上式中,f为脉冲频率;θr为电机步距角,根据电机型号确定;x为细分倍数;s为直线模组导程,即电机转过一周模组行进距离,即电机转过一周激光雷达移动距离;t为时间。
[0054]
根据公式(3)可以计算电控旋转台旋转后目标点的坐标,
[0055][0056]
上式中,r为转台中心点到激光雷达的直线距离。
[0057]
点云数据滤波具体包括以下步骤:
[0058]
(1)激光雷达采集电控旋转台上植株点云数据,只需要特定角度范围内,首先采用条件滤波器过滤范围外无用点,已知背景板长度s,激光雷达到背景板距离为l,则可根据条件:x∈(0,s),提取植株点云数据,在这个范围外的点将作为无用点被去除;
[0059]
(2)激光雷达产生的点云数据集接收到的错误回波信号,在滤波处理中将点云中的离群点及噪点进行去除,对后续点云数据进行处理。所述滤波的具体方法为在植株点云数据中,对所有点云进行邻域计算,计算每个点与其k邻域之间的距离集合,k的取值可以通过公式(4)得到,再根据公式(5)计算所有点到其k邻域距离的均值μ与标准差σ,则距离阈值d
max
可表示为d
max
=μ+α
×
σ,α是比例系数,根据植株叶片及冠层特点得到,对所有点云进行处理,对比剔除与k个邻居点的平均距离大于d
max
的点,
[0060][0061]
上式中,θ为激光雷达最小扫描角度;l为激光雷达两扫描点间的距离;l1为植株叶片最小尺寸,l2为植株叶片最大尺寸;λ为调整系数,受植物叶片及冠层特点影响;
[0062][0063]
上式中,n表述有效点云个数;
[0064]
经过滤波之后,保留下的点的集合即为想要的植株三维点云模型。
[0065]
因此,本发明采用上述结构的一种植物三维模型重建系统及方法,利用滑台模组和转台搭建了一个适合激光雷达采集植物三维点云数据的系统结构,重建速度快,误差较小,精度较高。
[0066]
最后应说明的是:以上实施例仅用以说明本发明的技术方案而非对其进行限制,尽管参照较佳实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对本发明的技术方案进行修改或者等同替换,而这些修改或者等同替换亦不能使修改后的技术方案脱离本发明技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1