万能试验机常温试样拉伸恒应变率精确控制的方法
1.本发明涉及动态试验机领域,尤其涉及一种万能试验机常温试样拉伸恒应变率精确控制的方法。
背景技术:
2.动态试验机通过闭环控制的方法进行拉伸恒应变率控制。该控制方法通常需要测量多个物理量,包括载荷、横梁柔度、横梁速度以及应力率等等,用本构的方法来迭代计算进行应变率控制。
3.动态试验机可以对拉伸试样进行恒应变率控制,但控制精度较低,而且迭代算法需要测量的物理量数目较多,计算比较困难。
技术实现要素:
4.本发明提供了一种万能试验机常温试样拉伸恒应变率精确控制的方法,包括依次执行以下步骤:
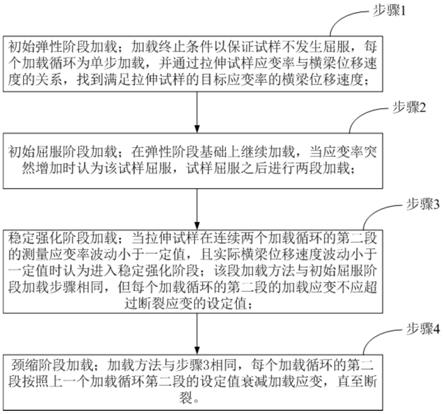
5.步骤1:初始弹性阶段加载;加载终止条件以保证试样不发生屈服,每个加载循环为单步加载,并通过拉伸试样应变率与横梁位移速度的关系,找到满足拉伸试样的目标应变率的横梁位移速度;作为本发明的进一步改进。
6.步骤2:初始屈服阶段加载;在弹性阶段基础上继续加载,当应变率突然增加时认为该试样屈服,试样屈服之后进行两段加载。
7.步骤3:稳定强化阶段加载;当拉伸试样在连续两个加载循环的第二段的测量应变率波动小于一定值,且实际横梁位移速度波动小于一定值时认为进入稳定强化阶段;该段加载方法与初始屈服阶段加载步骤相同,但每个加载循环的第二段的加载应变不应超过断裂应变的设定值。
8.步骤4:颈缩阶段加载;加载方法与步骤3相同,每个加载循环的第二段按照上一个加载循环第二段的设定值衰减加载应变,直至断裂。
9.作为本发明的进一步改进,在所述步骤1中,当试样处于初始弹性阶段时,每个加载循环为单步加载和卸载,加载的终止条件为目标应变对应的试样伸长量,且须保证试样仍在弹性范围内。
10.作为本发明的进一步改进,在所述步骤1中,需寻找能使试样以目标应变率加载的横梁位移速度v0,寻找方法如下:
11.在每一个加载循环中,试验机测得的应变率为横梁移动速率为vn,目标应变率为相应的理想横梁移动速度为v
nt
;在初始弹性阶段时,根据公式对下一加载循环的横梁位移速度进行预测,即v
n+1
=v
nt
,当与之间的相对误差小于10%以内时,可以认为v0=vn。
12.其中,的计算是通过试验机测量的加载循环引伸计位移量除以引伸计实时标距后得到的引伸计测量应变增量,与加载循环的时间做图,对曲线进行线性拟合得到的斜率即为测量应变率引伸计的标距段长度需尽量接近拉伸试样的平行段长度。引伸计的标距段长度选取平行段长度减去试样横截面平均尺寸的0.5到1.0倍,如圆棒试样的标距段一端距离平行段同一端长度为圆棒标距段半径的0.5到1.0倍。
13.作为本发明的进一步改进,在所述步骤2中,在找到横梁位移速度后,开始将加载的终止条件的试样伸长量逐步变大,并观察试样是否发生屈服,其标准是:在该加载循环的应变-时间曲线中,从上一个加载循环的最终应变到这一个加载循环的最终应变之间,观察试样应变率是否突然升高,并持续到到加载终止,如果有,则说明试样屈服。
14.作为本发明的进一步改进,在所述步骤2中,试样屈服之后进行两段加载,第一段的加载终止条件为上一加载循环加载最终的载荷,第二段须在第一段的基础上加载,加载的终止条件为用户自定的目标试样伸长量,通过除以实时引伸计标距得到目标应变。
15.作为本发明的进一步改进,在所述步骤2中,在初始屈服阶段的每个加载循环的第二步的目标应变增量从0.1%~0.2%开始,而且在下一个增量步变大为原来的1.5~2.5倍,到1.0%时持续到初始屈服阶段结束。
16.作为本发明的进一步改进,在所述步骤2中,加载循环第一段的横梁位移速度取v0,加载循环第二段的横梁速度预测公式为其中α是经验修正系数,在该阶段的前两次预测横梁位移速度时建议α取0.3~0.5,在之后取1.0。
17.当目标应变增量为1.0%且连续两次的加载循环的第二段测得应变率误差小于20%,且两次的横梁位移速度相对误差不超过20%,认为初始屈服阶段结束。
18.作为本发明的进一步改进,在所述步骤3中,当拉伸试样在连续两个加载循环的第二段的测量应变率波动小于20%,且实际横梁位移速度波动小于20%时认为进入稳定强化阶段。
19.作为本发明的进一步改进,在所述步骤3中,稳定强化阶段的加载循环的第二段应变增量从1.0%开始,并当满足连续两次的加载循环的第二段测得应变率误差小于15%,且两次的横梁位移速度相对误差不超过15%时,建议第二段应变增量扩大1.5~2.5倍,但最终第二段的加载应变不应超过断裂应变的10%;
20.横梁速度预测公式为
21.作为本发明的进一步改进,在所述步骤4中,每个加载循环的第二段按照上一个加载循环第二段的70%~80%衰减加载应变,直至断裂;横梁速度预测公式为其中α取0.9。
22.本发明的有益效果是:本发明的一种万能试验机常温试样拉伸恒应变率精确控制的方法能够精确控制拉伸过程中的应变率,误差总体在10%以内,测量的物理量仅需加载力、试样在测量段的位移和时间。
附图说明
23.图1是本发明方法原理框图;
24.图2是本发明方法对一种断后延伸率高达50%~60%的金属材料进行恒应变率控制的结果。
具体实施方式
25.本发明公开了一种万能试验机常温试样拉伸恒应变率精确控制的方法,思路如下:
26.将试样拉伸分为若干个加载循环,在进行每个加载循环之前,需要通过上一个加载循环测量的物理量预先确定这个加载循环的加载终止条件(包括载荷、试样测量段位移)以及横梁位移速度,测量试样的加载力、试样在测量段的位移,并求出应变率。首个加载循环的参数需要根据经验来设置。
27.如图1所示,本发明公开一种万能试验机常温试样拉伸恒应变率精确控制的方法,包括依次执行以下步骤:
28.步骤1:初始弹性阶段加载;加载终止条件以保证试样不发生屈服,每个加载循环为单步加载,并通过拉伸试样应变率与横梁位移速度的关系,找到满足拉伸试样的目标应变率的横梁位移速度。
29.步骤2:初始屈服阶段加载:在弹性阶段基础上继续加载,当应变率突然增加时认为该试样屈服,此时进行两段加载,第一段要求加载至上一个加载循环的最终载荷,第二段根据应变率控制情况选定加载的目标应变。
30.步骤3:稳定强化阶段加载;当拉伸试样在连续两个加载循环的第二段的测量应变率波动小于20%,且实际横梁位移速度波动小于20%时认为进入稳定强化阶段;该段加载方法与2)相同,但每个加载循环的第二段的加载应变不应超过断裂应变的10%。
31.步骤4:颈缩阶段加载;加载方法与步骤3相同,每个加载循环的第二段按照上一个加载循环第二段的70%~80%衰减加载应变,直至断裂。
32.在所述步骤1中,当试样处于初始弹性阶段时,每个加载循环为单步加载和卸载,加载的终止条件为目标应变对应的试样伸长量,且须保证试样仍在弹性范围内。
33.在初始弹性阶段的主要目的是找到能使试样以目标应变率加载的横梁位移速度v0,并按照以下方法寻找:在每一个加载循环中,试验机测得的应变率为横梁移动速率为vn,目标应变率为相应的理想横梁移动以认为v0=vn。
34.其中,的计算是通过试验机测量的加载循环引伸计位移量除以引伸计实时标距后得到的引伸计测量应变增量,与加载循环的时间做图,对曲线进行线性拟合得到的斜率即为测量应变率引伸计的标距段长度需尽量接近拉伸试样的平行段长度。引伸计的标距段长度选取平行段长度减去试样横截面平均尺寸的0.5到1.0倍,如圆棒试样的标距段一端距离平行段同一端长度为圆棒标距段半径的0.5到1.0倍。
35.在所述步骤2中,当在步骤1中找到横梁位移速度v0后,开始将加载的终止条件的试样伸长量逐步变大,并观察试样是否发生屈服,其标准是:在该加载循环的应变-时间曲线中,从上一个加载循环的最终应变到这一个加载循环的最终应变之间,观察试样应变率是否突然升高,并持续到到加载终止。如果有,则说明试样屈服。
36.试样屈服之后,将每个加载循环的加载方式变为两步加载,第一步的加载终止条件为上一加载循环加载最终的载荷,第二步须在第一步的基础上加载,加载的终止条件为用户自定的目标试样伸长量,通过除以实时引伸计标距得到目标应变。
37.在初始屈服阶段的每个加载循环的第二步的目标应变增量建议从0.1%~0.2%开始,而且在下一个增量步变大为原来的1.5~2.5倍,到1.0%时持续到初始屈服阶段结束。
38.加载循环第一段的横梁速度取v0,加载循环第二段的横梁移动速度预测公式为其中α是经验修正系数,在该阶段的前两次预测横梁位移速度时建议α取0.3~0.5,在之后取1.0。
39.当目标应变增量为1.0%且连续两次的加载循环的第二段测得应变率误差小于20%,且两次的横梁位移速度相对误差不超过20%,认为初始屈服阶段结束。
40.在所述步骤3中,稳定强化阶段的加载循环的第二段应变增量从1.0%开始,并当满足连续两次的加载循环的第二段测得应变率误差小于15%,且两次的横梁位移速度相对误差不超过15%时,建议第二段应变增量扩大1.5~2.5倍,但最终第二段的加载应变不应超过断裂应变的10%。
41.横梁移动速度预测公式为
42.该阶段的结束标志为载荷开始下降。
43.在所述步骤4中,每个加载循环的第二段按照上一个加载循环第二段的70%~80%衰减加载应变,直至断裂。
44.横梁移动速度预测公式为其中α取0.9。
45.在颈缩过程中,应变率在试样上的分布不均匀,该方法控制的是试样的平均应变率。
46.本发明的有益效果:本发明的一种万能试验机常温试样拉伸恒应变率精确控制的方法能够精确控制拉伸过程中的应变率,误差总体在10%以内,测量的物理量仅需加载力、试样在测量段的位移和时间。
47.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1