用于电气化运输车辆的里程估计的系统和方法与流程
用于电气化运输车辆的里程估计的系统和方法
1.相关申请
2.本技术要求于2020年11月16日提交的美国临时申请no.63/114,215的优先权,该美国临时申请的公开在此通过引用明确地并入本文中。
技术领域
3.本公开总体上涉及为电气化运输车辆提供路线识别和/或里程估计(range estimation)。
背景技术:
4.最近,对具有电气化动力系的车辆(例如,具有多种动力形式的车辆)提高燃料经济性并减少排放的需求不断增加。一些电气化动力系包括发动机(例如,内燃机)、电动机/发电机和电池。发动机可以产生传递到混合动力传动系统的驱动扭矩并为电池充电。当电池充满电时,电气化动力系可以在不使用发动机的情况下工作。一些电气化动力系仅由电力(例如,电池)提供动力。使用电气化动力系的车辆需要可靠的里程估计。
技术实现要素:
5.运输车辆通常沿预设路线行驶。在一些实施方式中,运输路线包括预设起始位置、预设结束位置和一个或更多个预设运输停靠位置。在一些情况下,包括电气化运输车辆的运输车辆可能会在预设路线的不同子路线中行驶,例如,由于交通、道路建设等。作为示例,运输车辆是公共汽车。如本文所使用的,子路线是指运输车辆所采取的路径。在一个示例中,沿相反方向采取的路线被称为不同的子路线。路线信息可以从通用运输反馈规范(gtfs)数据库或其它运输数据源中取回。识别电气化运输车辆所采取的子路线可以提高电气化运输车辆的里程估计(即,行驶里程的估计)。在一些实施方式中,为子路线中的位置获得高度信息并且可以在里程估计中使用高度信息。
6.如示例中所述,示例1是由具有一个或更多个处理器和一个或更多个存储器的系统实现的方法。该方法还包括以下步骤:从运输数据源接收运输路线信息;基于运输路线信息产生多条路线和多条子路线,多条路线中的每条路线包括路径彼此不同的一条或更多条子路线;接收电气化运输车辆的位置信息;基于位置信息识别电气化运输车辆所采取的子路线,所识别的子路线是多条子路线中的一者;以及基于位置信息和所识别的子路线,确定电气化运输车辆的里程估计。
7.示例2是根据示例1所述的方法,所述方法还包括:生成与电气化运输车辆的多条所选子路线相关联的多个得分,多个得分中的每个得分与相应的子路线相关联并且基于电气化运输车辆的位置和相应的子路线之间的距离来生成;其中,所识别的子路线是基于多个得分确定的。
8.示例3是根据示例2所述的方法,其中,使用与位置相关联的gps坐标和与相应子路线相关联的gps坐标来确定距离。
9.示例4是根据示例1至3中任一项所述的方法,其中,位置信息包括gps坐标的时间序列,该方法还包括:通过确定行程的起始位置来确定电气化运输车辆的行程,其中,起始位置是基于大于阈值的电气化运输车辆的静止时间来确定的。
10.示例5是根据示例4所述的方法,其中,阈值是预定阈值。
11.示例6是根据示例4所述的方法,其中,基于位置信息调整阈值。
12.示例7是根据示例1至6中任一项所述的方法,所述方法还包括:接收与运输路线信息相关联的历史远程信息处理数据(historical telematics data),与特定运输路线相关联的历史远程信息处理数据包括与特定运输路线相关联的gps坐标的时间序列,与特定路线相关联的历史远程信息处理数据还包括指示与特定运输路线中的位置相关联的高度的数据;其中,生成多条路线和多条子路线的步骤包括:基于运输路线信息和历史远程信息处理数据生成多条路线和多条子路线。
13.示例8是根据示例7所述的方法,其中,生成多条路线和多条子路线的步骤包括:使用机器学习模型生成多条路线和多条子路线,其中,使用历史远程信息处理数据的至少一部分训练机器学习模型。
14.示例9是根据示例7所述的方法,其中,多条子路线中的每条子路线包括gps坐标序列和与gps坐标序列中的一个gps坐标相关联的至少一个高度,其中,确定电气化运输车辆的里程估计的步骤包括:基于gps坐标序列和所识别的子路线的至少一个高度来确定里程估计。
15.示例10是根据示例1至9中任一项所述的方法,其中,确定电气化运输车辆的里程估计的步骤包括:确定基于电气化运输车辆的位置信息、所识别的子路线和工作状况估计的里程。
16.示例11是一种系统,所述系统包括:一个或更多个处理器,所述一个或更多个处理器具有:指令;以及一个或更多个存储器,所述一个或更多个存储器被配置为执行指令以执行操作,所述操作包括:从运输数据源接收运输路线信息;基于运输路线信息产生多条路线和多条子路线,多条路线中的每条路线包括路径彼此不同的一条或更多条子路线;接收电气化运输车辆的位置信息;基于位置信息识别电气化运输车辆所采取的子路线,所识别的子路线是多条子路线中的一者;以及基于位置信息和所识别的子路线,确定电气化运输车辆的里程估计。
17.示例12是根据示例11所述的系统,其中,所述操作还包括:生成与电气化运输车辆的多个所选子路线相关联的多个得分,多个得分中的每个得分与相应的子路线相关联并且基于电气化运输车辆的位置和相应的子路线之间的距离来生成;其中,所识别的子路线是基于多个得分确定的。
18.示例13是根据示例12所述的系统,其中,使用与位置相关联的gps坐标和与相应子路线相关联的gps坐标来确定距离。
19.示例14是根据示例11至13中任一项所述的系统,其中,位置信息包括gps坐标的时间序列,其中,所述操作还包括:通过确定行程的起始位置来确定电气化运输车辆的行程,其中,起始位置是基于大于阈值的电气化运输车辆的静止时间来确定的。
20.示例15是根据示例14所述的系统,其中,阈值是预定阈值。
21.示例16是根据示例14所述的系统,其中,基于位置信息调整阈值。
22.示例17是根据示例11-16中任一项所述的系统,其中,所述操作还包括:接收与运输路线信息相关联的历史远程信息处理数据,与特定运输路线相关联的历史远程信息处理数据包括与特定运输路线相关联的gps坐标的时间序列,与特定路线相关联的历史远程信息处理数据还包括指示与特定运输路线中的位置相关联的高度的数据;其中,生成多条路线和多条子路线的步骤包括:基于运输路线信息和历史远程信息处理数据生成多条路线和多条子路线。
23.示例18是根据示例17所述的系统,其中,生成多条路线和多条子路线的步骤包括:使用机器学习模型生成多条路线和多条子路线,其中,使用历史远程信息处理数据的至少一部分训练机器学习模型。
24.示例19是根据示例17所述的系统,其中,多条子路线中的每条子路线包括gps坐标序列和与gps坐标序列中的一个gps坐标相关联的至少一个高度,其中,确定电气化运输车辆的里程估计的步骤包括:基于gps坐标序列和所识别的子路线的至少一个高度来确定里程估计。
25.示例20是根据示例11至19中任一项所述系统,其中,确定电气化运输车辆的里程估计的步骤包括:确定基于电气化运输车辆的位置信息、所识别的子路线和工作状况估计的里程。
26.示例21是由具有一个或更多个处理器和一个或更多个存储器的系统实现的方法。该方法还包括以下步骤:接收与运输路线信息相关联的历史远程信息处理数据,与特定运输路线相关联的历史远程信息处理数据包括与特定运输路线相关联的gps坐标的时间序列,与特定路线相关联的历史远程信息处理数据还包括指示与特定路线中的位置相关联的高度的数据;基于历史远程信息处理数据生成多条路线和多条子路线,多条路线中的每条路线包括具有彼此不同路径的一条或更多条子路线,每条子路线包括与gps坐标序列中的一个gps坐标相关联的至少一个高度;接收电气化运输车辆的位置信息;基于位置信息识别电气化运输车辆所采取的子路线,所识别的子路线是多条子路线中的一者;以及基于位置信息和所识别的子路线,确定电气化运输车辆的里程估计。
27.示例22是根据示例21所述的方法,其中,生成多条路线和多条子路线的步骤包括:使用机器学习模型生成多条路线和多条子路线,其中,使用历史远程信息处理数据的至少一部分训练机器学习模型。
28.示例23是一种系统,所述系统包括:一个或更多个处理器,所述一个或更多个处理器具有指令;以及一个或更多个存储器,所述一个或更多个存储器被配置为执行指令以执行操作,所述操作包括:接收与运输路线信息相关联的历史远程信息处理数据,与特定运输路线相关联的历史远程信息处理数据包括与特定运输路线相关联的gps坐标的时间序列,与特定路线相关联的历史远程信息处理数据还包括与特定路线中的位置相关联的指示高度的数据;基于历史远程信息处理数据生成多条路线和多条子路线,多条路线中的每条路线包括具有彼此不同路径的一条或更多条子路线,每条子路线包括与gps坐标序列中的一个gps坐标相关联的至少一个高度;接收电气化运输车辆的位置信息;基于位置信息识别电气化运输车辆所采取的子路线,所识别的子路线是多条子路线中的一者;以及基于位置信息和所识别的子路线,确定电气化运输车辆的里程估计。
29.示例24是根据示例23所述的系统,其中,生成多条路线和多条子路线包括使用机
器学习模型生成多条路线和多条子路线,其中,使用历史远程信息处理数据的至少一部分训练机器学习模型。
附图说明
30.通过参考以下结合附图对本公开的实施方式的描述,本公开的上述和其它特征以及获得它们的方式将变得更加明显,并且本公开本身将被更好地理解,在附图中:
31.图1描绘了根据本公开的主题的实施方式的电气化运输车辆系统的示意图;
32.图2是描绘根据本公开的主题的实施方式的电气化运输车辆的路线识别/里程估计的说明性方法的示例流程图;
33.图3是描绘根据本公开的主题的实施方式的电气化运输车辆的路线识别/里程估计的说明性方法的另一示例流程图;
34.图4是描绘根据本公开的实施方式的要用于训练机器学习模型的预处理历史远程信息处理数据的说明性方法的示例流程图;以及
35.图5描绘了根据本公开的主题的实施方式的示例电气化运输车辆环境。
具体实施方式
36.除非另有说明,在说明书和权利要求中使用的所有表示特征尺寸、数量和物理性质的数字应理解为在所有情况下都被术语“约”修饰。因此,除非有相反的指示,前述说明书和所附权利要求中阐述的数值参数是近似值,其可以根据本领域技术人员利用本文公开的教导寻求获得的期望特性而变化。端点使用的数字范围包括该范围内的所有数字(例如,1至5包括1、1.5、2、2.75、3、3.80、4和5)以及该范围内的任何范围。
37.如在本说明书和所附权利要求中使用的,单数形式“一”、“一个”和“该”涵盖具有复数参照对象的实施方式,除非内容另有明确规定。在本说明书和所附权利要求书中使用的术语“或”通常以其包括“和/或”的含义使用,除非内容另有明确规定。
38.如本文所用,当元件、组件、设备或层被描述为“在另一元件、组件、设备或层上”、“连接到另一元件、组件、设备或层”、“联接到另一元件、组件、设备或层”或“与另一元件、组件、设备或层接触”时,例如,它可以直接在特定元件、组件或层上,直接连接到特定元件、组件或层,直接联接到特定元件、组件或层,与特定元件、组件或层直接接触,或者中间元件、组件、设备或层可以在特定元件、组件或层上,连接到特定元件、组件或层,联接到特定元件、组件或层,或者与特定元件、组件或层接触。例如,当元件、组件、设备或层被称为“直接在另一元件、组件、设备或层上”、“直接连接到另一元件、组件、设备或层”、“直接联接到另一元件、组件、设备或层”或“与另一元件、组件、设备或层直接接触”时,例如,不存在中间元件、组件、设备或层。
39.尽管说明性方法可以由一幅或多幅附图(例如,流程图、通信流等)表示,但附图不应被解释为暗示本文公开的各个步骤当中或之间的任何要求或特定顺序。然而,特定某些实施方式可能需要特定步骤和/或特定某些步骤之间的特定顺序,如本文中可明确描述的和/或可从步骤本身的性质理解的(例如,某些步骤的执行可能取决于前一步骤的结果)。此外,项(例如,输入、算法、数据值等)的“集合”、“子集”、“系列”或“组”可以包括一个或更多个项,并且类似地,项的子集或子组可以包括一个或更多个项。“多个”意味着一个以上。
40.如本文所用,术语“基于”并不意味着是限制性的,而是指示通过使用至少“基于”之后的术语作为输入来执行确定、识别、预测、计算等。例如,基于一条特定信息预测结果可以另外地或另选地基于另一条信息进行相同的确定。
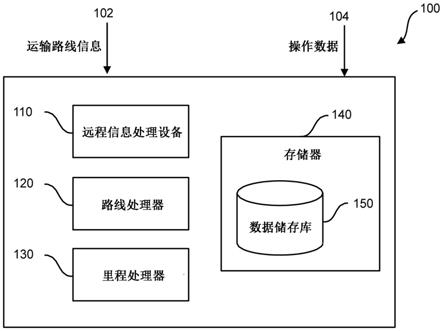
41.图1描绘了根据本公开的主题的实施方式的电气化运输车辆系统100的示意图。在一些实现方式中,系统100的一个或更多个组件可以是可选的。在一些实现方式中,系统100可以包括图中未示出的其它组件。在所示示例中,电气化运输车辆系统100包括远程信息处理设备110、路线处理器120、里程处理器130、一个或更多个存储器140和一个或更多个数据储存库150。系统100可以从运输数据源接收运输路线信息102。在一示例中,运输数据源包括gtfs数据库,其中,系统从gtfs数据库取回运输路线信息。在另一示例中,运输数据源包括运输系统,并且电气化运输车辆系统100和/或路线处理器120被配置为经由软件接口(例如,api、网络服务等)接收运输路线信息。
42.电气化运输车辆系统100可以接收一个或更多个电气化运输车辆的操作数据104。操作数据包括例如速度、发动机功率水平、扭矩、电池健康状况(例如,保持电荷的效率)、电池充电状态(soc)、制动热效率(bte)等。操作数据还可包括车辆传感器数据,诸如,例如噪声数据、振动数据、粗糙度数据、排气温度、催化剂温度、高度数据等。在一些实施方式中,电气化运输车辆包括高度传感器,例如,气压传感器。
43.在一些实现方式中,路线处理器120被配置为接收运输路线的历史远程信息处理数据。在一些情况下,路线处理器120被配置为从数据储存库150取回历史远程信息处理数据。历史远程信息处理数据可以从电气化运输车辆的相应远程信息处理设备生成。在一些情况下,与特定运输路线相关联的历史远程信息处理数据包括与特定运输路线相关联的gps坐标的时间序列。在一些情况下,与特定路线相关联的历史远程信息处理数据还包括指示与特定运输路线中的位置相关联的高度的数据。在一些情况下,与特定路线相关联的历史远程信息处理数据还包括与特定运输路线中的多个位置相关联的指示多个高度的数据。在一些情况下,高度数据是从运输车辆上的气压传感器收集的。在一些情况下,高度数据是从数据源取回的。在一个示例中,使用位置信息作为输入从数据源取回高度数据。
44.在一些实施方式中,路线处理器120被配置为生成多条路线和多条子路线,其中,多条路线中的每条路线包括具有彼此不同路径的一条或更多条子路线。如本文所用,路线是指具有特定起始位置和特定结束位置的运输路线。在一些情况下,特定起始位置和特定结束位置是同一位置。在一些情况下,子路线包括gps坐标序列。在一些实现方式中,路线的多个子路线具有彼此不同的路径/方向,而多条子路线具有相同的起始位置和相同的结束位置。在某些实现方式中,路线的多条子路线具有彼此不同的路径/方向,而多条子路线具有相同的起始位置、相同的结束位置和一个或更多个相同的运输停靠位置。在一些情况下,子路线包括gps坐标的时间序列。在一些情况下,具有第一方向的路线是与具有与第一方向相反的第二方向的路线不同的子路线。在一些实现方式中,每条子路线在被绘制时具有相关联的形状。在一些实施方式中,子路线包括关于路线的更多信息,诸如,高度信息。
45.在一些情况下,路线处理器120被配置为处理运输路线信息以生成多条路线和多条子路线。在一些实施方式中,路线处理器120被配置为识别路线变化以生成多条路线和多条子路线。在一些情况下,如果静止时间大于阈值,则确定路线改变。在一个示例中,阈值是预定阈值。在一些情况下,子路线包括gps坐标序列以及与该gps坐标序列中的一个gps坐标
相关联的至少一个高度。在一些情况下,子路线包括gps坐标序列和相关的高度。
46.在一些情况下,路线处理器120被配置为处理历史远程信息处理数据以生成多条路线和多条子路线。在一些情况下,路线处理器120被配置为处理运输路线信息和历史远程信息处理数据以生成多条路线和多条子路线。在一些情况下,路线处理器120被配置为例如使用历史远程信息处理数据用高度信息更新多个子路线。在一些情况下,高度信息包括子路线中的每个gps坐标的高度。在一些情况下,高度信息包括子路线中的所选gps坐标的高度数据。在一些情况下,高度信息是从gps网格信息收集的。在一些情况下,路线处理器120被配置为使用经训练的机器学习模型生成多条路线和多条子路线,其中,使用历史远程信息处理数据的至少一部分来训练机器学习模型。
47.在一些实施方式中,路线处理器120和/或里程处理器130被配置为使用历史远程信息处理数据和/或历史操作数据来训练机器学习模型。在一些实施方式中,路线处理器120和/或里程处理器130被配置为使用历史远程信息处理数据和/或历史操作数据的第一子集来训练机器学习模型。在一些情况下,使用预处理过程选择历史远程信息处理数据的第一子集。机器学习模型可以包括任何合适的机器学习模型、深度学习模型等。在一些实施方式中,机器学习模型包括决策树、随机森林、支持向量机、卷积神经网络、循环神经网络等中的至少一个。可选地,路线处理器120和/或里程处理器130可以使用历史远程信息处理数据和/或历史操作数据的第二子集来测试经训练的机器学习模型。在一个实施方式中,历史远程信息处理数据和/或历史操作数据的第一子集以及历史远程信息处理数据和/或历史操作数据的第二子集没有任何交叠的数据集。在另一实施方式中,历史远程信息处理数据的第一子集和历史远程信息处理数据的第二子集具有至少一个交叠的数据集。
48.在一些情况下,机器学习模型包括图像分类机器学习模型。在一些情况下,路线处理器120被配置为使用每个子路线的gps坐标生成曲线图并且训练机器学习模型以识别曲线图的形状。在一些实施方式中,机器学习模型包括神经网络。在一些情况下,神经网络包括多个层。在一个实施方式中,神经网络至少包括输入层、一个或更多个隐藏层和输出层。在一些实施方式中,神经网络的至少一个输入层用于远程信息处理数据。在一些实施方式中,神经网络的至少一个输入层用于操作数据。在一个示例中,机器学习模型被训练以使用远程信息处理数据识别位置。
49.在一些情况下,使用历史远程信息处理数据和历史操作数据来训练机器学习模型。操作数据包括例如电气化车辆的电池充电状态、行驶的距离、制动热效率和其它操作数据。在一些实施方式中,机器学习模型被训练以使用历史远程信息处理数据和历史操作数据来预测里程估计。在一个示例中,机器学习模型是神经网络,所述神经网络包括用于远程信息处理数据的输入层、用于操作数据的输入层、用于路线信息的输入层和/或用于里程估计的输出层。在一个实施方式中,机器学习模型包括多个机器学习模型,其中,第一机器学习模型被配置为采用远程信息处理数据和路线信息作为输入来预测路线,而第二机器学习模型被配置为获得所预测的路线并将操作数据作为输入来预测行驶里程。在一个示例中,第一机器学习模型包括图像分类机器学习模型。
50.在一些情况下,路线处理器120和/或里程处理器130被配置为接收电气化运输车辆的位置信息。在一些实施方式中,位置信息包括从电气化运输车辆的一个或更多个远程信息处理设备110收集的数据。在一些情况下,位置信息包括从电气化运输车辆中的移动设
备收集的数据。在一个示例中,位置信息包括gps坐标序列。在一个示例中,位置信息包括gps坐标的时间序列。在一些实施方式中,位置信息包括电气化运输车辆的速度信息和/或制动信息。
51.在一些实现方式中,路线处理器120被配置为基于位置信息确定电气化运输车辆的行程。在一些情况下,电气化运输车辆采取多条不同的路线/子路线。在这种情况下,路线处理器120被配置为基于车辆的静止时间确定行程的起始位置。在一些情况下,如果静止时间大于阈值,则确定起始位置。在一个示例中,阈值是预定阈值。在另一示例中,路线处理器120被配置为例如基于所收集的远程信息处理数据、位置信息等来调整阈值。
52.在一些实施方式中,例如与所生成的子路线相比,路线处理器120被配置为确定与行程相关联的多个得分。这些得分也称为子路线得分。在一些情况下,路线处理器120被配置为确定与电气化运输车辆的多条所选子路线相关联的多个得分,其中,多个得分中的每个得分与相应的子路线相关联并且基于电气化运输车辆的位置和相应的子路线之间的距离来生成。在一些情况下,距离是基于gps坐标确定的。在一些情况下,可以基于电气化运输车辆的多个位置和相应子路线来确定子路线的得分。在一个示例中,子路线的得分是基于电气化运输车辆的多个位置到相应子路线的最小距离确定的。
53.在一个示例中,子路线的得分是基于电气化运输车辆的多个位置到相应子路线的参考位置的平均距离确定的。在一个示例中,使用从位置到子路线的最短距离来计算位置到子路线的距离。例如,路线处理器120可以使用三角剖分(delaunay triangulation)算法来计算距离。在一些情况下,得分是基于所计算的到多个子路线的距离的归一化得分。在一个示例中,使用在子路线中标识的参考位置的数量对得分进行归一化。在一些情况下,得分是使用经训练的机器学习模型确定的。在一些情况下,得分是使用经训练的人工神经网络确定的,其中,人工神经网络包括子路线得分的输出层。
54.在一些实现方式中,路线处理器120被配置为例如基于位置信息和/或多个得分来识别电气化运输车辆所采用的子路线。在一个实施方式中,所识别的子路线具有针对子路线确定的得分中的最低子路线得分。在一些情况下,里程处理器130被配置为接收电气化运输车辆的工作状况。在一些情况下,电气化运输车辆的工作状况可以包括例如电池充电状态、扭矩、制动热效率等。
55.在一些实施方式中,里程处理器130被配置为例如基于位置信息和所识别的子路线确定电气化运输车辆的里程估计。在一些情况下,里程处理器130被配置为基于工作状况/数据、位置信息和所识别的子路线来确定里程估计。在一些情况下,里程处理器130被配置为至少部分地基于所识别的子路线的高度信息来确定里程估计。在一个示例中,高度信息被用于预测电气化运输车辆在所识别的子路线中行驶时的未来功耗。在一些情况下,里程处理器130被配置为使用经训练的机器学习模型来预测里程估计。在一个示例中,使用经训练的人工神经网络来预测里程估计,其中,人工神经网络包括用于里程估计的输出层。
56.在一些实施方式中,里程处理器130可以使用从历史数据(例如,跨行驶的距离消耗的能量)中学习的自适应算法来确定车辆以电池中可用的剩余能量可以行驶的距离。利用所识别的车辆正行驶的子路线的信息,可以提高里程估计的精度。
57.在一些实施方式中,计算设备(例如,路线处理器120、里程处理器130、电气化运输车辆系统100)包括直接和/或间接联接以下设备的通信总线:处理器、存储器、输入/输出
(i/o)端口、i/o组件和电源。任何数量的附加组件、不同组件和/或组件的组合也可以包括在计算设备中。在一些情况下,计算设备可以包括一个或更多个云服务器。通信总线代表可以是一个或更多个总线的总线(诸如,例如,地址总线、数据总线或它们的组合)。类似地,在一些实施方式中,计算设备可以包括多个处理器、多个存储器组件、多个i/o端口、多个i/o组件和/或多个电源。此外,电气化运输车辆系统100的任何意数量的组件(例如,路线处理器120、里程处理器130)或其组合可以跨多个计算设备分布和/或复制。
58.在一些实施方式中,存储器140包括易失性和/或非易失性存储器、暂时性和/或非暂时性存储介质形式的计算机可读介质并且可以是可移除的、不可移除的或其组合。介质示例包括随机存取存储器(ram);只读存储器(rom);电可擦除可编程只读存储器(eeprom);闪存;光学或全息介质;盒式磁带、磁带、磁盘存储器或其它磁性存储设备;数据传输;和/或可用于存储信息并可被计算设备访问的任何其它介质,诸如,例如,量子状态存储器等。在一些实施方式中,存储器140存储用于使处理器(例如,路线处理器120、里程处理器130)实现本文讨论的系统组件的实施方式的多个方面和/或执行本文讨论的方法和过程的实施方式的方面的计算机可执行指令。
59.计算机可执行指令可以包括例如计算机代码、机器可用指令等,诸如,例如,能够由与计算设备相关联的一个或更多个处理器执行的程序组件。程序组件可以使用任何数量的不同编程环境来编程,包括各种语言、开发工具包、框架等。本文设想的一些或全部功能也可以或另选地以硬件和/或固件实现。
60.数据储存库150可以存储远程信息处理数据、运输路线信息、所生成的路线和子路线、操作数据、里程估计和/或其它数据。数据储存库150可以使用下面描述的配置中的任何一种来实现。数据储存库可以包括随机存取存储器、平面文件、xml文件和/或在一个或更多个数据库服务器或数据中心上执行的一个或更多个数据库管理系统(dbms)。数据库管理系统可以是关系(rdbms)、分层(hdbms)、多维(mdbms)、面向对象(odbms或oodbms)或对象关系(ordbms)数据库管理系统等。例如,数据储存库可以是单个关系数据库。在一些情况下,数据储存库可以包括多个数据库,所述多个数据库可以通过数据集成处理或软件应用交换和聚合数据。在示例性实施方式中,数据储存库150的至少一部分可以被托管在云数据中心中。在一些情况下,数据储存库可以被托管在单个计算机、服务器、存储设备、云服务器等上。在其它一些情况下,数据储存库可以被托管在一系列联网计算机、服务器或设备上。在一些情况下,数据储存库可以被托管在包括本地、区域和中央数据存储设备的多等级数据存储设备。
61.系统100的各种组件可以经由通信接口(例如,有线或无线接口)进行通信或联接到通信接口。通信接口包括但不限于任何有线或无线短程和远程通信接口。有线接口可以使用电缆、电线等。短程通信接口可以是例如局域网(lan)、符合已知通信标准(诸如,标准、ieee802标准(例如,ieee802.11)、或类似规范(诸如,那些基于ieee802.15.4标准或其它公共或专有无线协议的规范))的接口。远程通信接口可以是例如广域网(wan)、蜂窝网络接口、卫星通信接口等。通信接口可以在私有计算机网络(诸如,内联网)内或者在公共计算机网络(诸如,互联网)上。
62.图2是描绘根据本公开的实施方式的电气化运输车辆的路线识别/里程估计的说明性方法200的示例流程图。方法200的实施方式的多个方面可以例如由一个或更多个处理
器或系统(例如,图1中的路线处理器120和/或里程处理器130、图1中的电气化运输车辆系统100)执行。方法200的一个或更多个步骤是可选的和/或可以通过本文描述的其它实施方式的一个或更多个步骤修改。此外,本文描述的其它实施方式的一个或更多个步骤可以添加到方法200。首先,电气化运输车辆系统从运输数据源接收运输路线信息(210)。在一个示例中,运输数据源包括gtfs数据库,其中,路线处理器是con。在另一示例中,运输数据源包括运输系统,并且路线处理器被配置为经由软件接口(例如,api、web服务等)接收运输路线信息。
63.在一些实施方式中,电气化运输车辆系统被配置为生成多条路线和多条子路线(215),其中,多条路线中的每条路线包括具有彼此不同的路径的一条或更多条子路线。在某些情况下,子路线包括gps坐标序列。在一些情况下,子路线包括gps坐标的时间序列。在一些情况下,具有第一方向的路径/路线是与具有与第一方向相反的第二方向的路径/路线不同的子路线。在一些实现方式中,每个子路线在被绘制时具有相关联的形状。在一些实施方式中,子路线包括关于路线的更多信息,诸如,高度信息。在一些情况下,电气化运输车辆系统被配置为处理运输路线信息以生成多条路线和多条子路线。
64.在一些实施方式中,电气化运输车辆系统被配置为识别路线变化以生成多条路线和多条子路线。在一些情况下,如果静止时间大于阈值,则确定路线改变。在一个示例中,阈值是预定阈值。在另一示例中,电气化运输车辆系统被配置为例如基于所收集的远程信息处理数据、位置信息等来调整阈值。在一些情况下,电气化运输车辆系统被配置为至少部分地基于历史远程信息处理数据生成多条路线和多条子路线。在一些情况下,电气化运输车辆系统被配置为基于运输路线信息和历史远程信息处理数据生成多条路线和多条子路线。
65.在一些实施方式中,电气化运输车辆系统被配置为使用机器学习模型生成多条路线和多条子路线。在一些实施方式中,电气化运输车辆系统被配置为使用历史远程信息处理数据和/或历史操作数据来训练机器学习模型。在一些实施方式中,电气化运输车辆系统被配置为使用历史远程信息处理数据和/或历史操作数据的第一子集来训练机器学习模型。在一些情况下,使用预处理过程选择历史远程信息处理数据的第一子集。图4中示出了预处理训练数据的一个示例过程。机器学习模型可以包括任何合适的机器学习模型、深度学习模型等。在一些实施方式中,机器学习模型包括决策树、随机森林、支持向量机、卷积神经网络、循环神经网络等中的至少一个。可选地,系统可以使用历史远程信息处理数据和/或历史操作数据的第二子集来测试经训练的机器学习模型。在一个实施方式中,历史远程信息处理数据的第一子集和历史远程信息处理数据的第二子集不具有任何交叠的数据集。在另一实施方式中,历史远程信息处理数据和/或历史操作数据的第一子集以及历史远程信息处理数据和/或历史操作数据的第二子集具有至少一个交叠的数据集。
66.在一些情况下,机器学习模型包括图像分类机器学习模型。在一些情况下,电气化运输车辆系统被配置为使用每个子路线的gps坐标生成曲线图并且训练机器学习模型以识别曲线图的形状。在一些实施方式中,机器学习模型包括神经网络。在一些情况下,神经网络包括多个层。在一个实施方式中,神经网络至少包括输入层、一个或更多个隐藏层和输出层。在一些实施方式中,神经网络的至少一个层用于远程信息处理数据。在一个示例中,机器学习模型被训练为使用远程信息处理数据识别位置。
67.在一些情况下,机器学习模型使用历史远程信息处理数据和历史操作数据来训
练。操作数据包括电气化车辆的电池充电状态、行驶的距离、制动热效率和其它操作数据。在一些实施方式中,机器学习模型被训练为使用历史远程信息处理数据和历史操作数据来预测里程估计。在一个示例中,机器学习模型是神经网络,所述神经网络包括用于远程信息处理数据的输入层、用于操作数据的输入层、用于路线信息的输入层和/或用于里程估计的输出层。在一个实施方式中,机器学习模型包括多个机器学习模型,其中,第一机器学习模型被配置为采用远程信息处理数据和路线信息作为输入来预测路线,而第二机器学习模型被配置为获得所预测的路线并将操作数据作为输入来预测行驶里程。在一个示例中,第一机器学习模型包括图像分类机器学习模型。
68.在一些情况下,电气化运输车辆系统被配置为接收电气化运输车辆的位置信息(220)。在一些实施方式中,位置信息包括从电气化运输车辆的一个或更多个远程信息处理设备(例如,图1中的远程信息处理设备110)收集的数据。在一些情况下,位置信息包括从电气化运输车辆中的移动设备收集的数据。在一个示例中,位置信息包括gps坐标序列。在一个示例中,位置信息包括gps坐标的时间序列。在一些实施方式中,位置信息包括电气化运输车辆的速度信息和/或制动信息。
69.在一些实现方式中,电气化运输车辆系统被配置为例如基于位置信息和/或多个得分来识别电气化运输车辆所采用的子路线(225)。在一个实施方式中,所识别的子路线具有针对子路线生成的得分中的最低子路线得分。在一些情况下,电气化运输车辆系统被配置为接收电气化运输车辆的工作状况。在一些情况下,电气化运输车辆的工作状况可以包括例如电池充电状态、扭矩、制动热效率等。
70.在一些实施方式中,电气化运输车辆系统被配置为例如基于位置信息和所识别的子路线确定电气化运输车辆的里程估计(230)。在一些情况下,电气化运输车辆系统被配置为基于工作状况、位置信息和所识别的子路线来确定里程估计。在一些情况下,电气化运输车辆系统被配置为至少基于所识别的子路线的高度信息来确定里程估计。在一个示例中,高度信息被用于预测电气化运输车辆在所识别的子路线中行驶时的未来功耗。在一些情况下,系统被配置为使用经训练的机器学习模型来预测里程估计。在一个示例中,使用经训练的人工神经网络来预测里程估计,其中,人工神经网络包括用于里程估计的输出层。在一个示例中,使用经训练的人工神经网络来预测里程估计,其中,人工神经网络包括用于包括高度信息的路线数据的输入层和用于里程估计的输出层。
71.图3是描绘根据本公开的实施方式的电气化运输车辆的路线识别/里程估计的说明性方法300的示例流程图。方法300的实施方式的多个方面可以例如由一个或更多个处理器或系统(例如,图1中的路线处理器120和/或里程处理器130、图1中的电气化运输车辆系统100)执行。方法300的一个或更多个步骤是可选的和/或可以通过本文描述的其它实施方式的一个或更多个步骤修改。此外,本文描述的其它实施方式的一个或更多个步骤可以添加到方法300。首先,电气化运输车辆系统从运输数据源接收运输路线信息(310)。在一示例中,运输数据源包括gtfs数据库,其中,系统从gtfs数据库取回运输路线信息。在另一示例中,运输数据源包括运输系统,并且电气化运输车辆系统被配置为经由软件接口(例如,api、web服务等)接收运输路线信息。
72.在一些实现方式中,电气化运输车辆系统被配置为接收历史远程信息处理数据(315)并且可选地接收运输路线的历史操作数据。历史远程信息处理数据可以从电气化运
输车辆的相应远程信息处理设备生成。在一些情况下,与特定运输路线相关联的历史远程信息处理数据包括与特定运输路线相关联的gps坐标的时间序列。在一些情况下,与特定路线相关联的历史远程信息处理数据还包括指示与特定运输路线的gps坐标的时间序列中的一个gps坐标相关联的高度的数据。在一些情况下,与特定路线相关联的历史远程信息处理数据还包括与特定运输路线的gps坐标的时间序列中的多个gps坐标相关联的指示多个高度的数据。
73.在一些实施方式中,电气化运输车辆系统被配置为生成多条路线和多条子路线(320),其中,多条路线中的每条路线包括具有彼此不同的路径的一条或更多条子路线。在一些情况下,子路线包括gps坐标序列。在一些情况下,子路线包括gps坐标的时间序列。在一些情况下,具有第一方向的路径是与具有与第一方向相反的第二方向的路径不同的子路线。在一些实现方式中,每条子路线在被绘制时具有相关联的形状。在一些实施方式中,子路线包括关于路线的更多信息,诸如,高度信息。在一些情况下,电气化运输车辆系统被配置为处理运输路线信息以生成多条路线和多条子路线。
74.在一些实施方式中,电气化运输车辆系统被配置为识别路线变化以生成多条路线和多条子路线。在一些情况下,如果静止时间大于阈值,则确定路线改变。在一个示例中,阈值是预定阈值。在一些情况下,电气化运输车辆系统被配置为处理历史远程信息处理数据以生成多条路线和多条子路线。在一些情况下,电气化运输车辆系统被配置为处理运输路线信息和历史远程信息处理数据以生成多条路线和多条子路线。
75.在一些情况下,电气化运输车辆系统被配置为例如使用历史远程信息处理数据用高度信息更新多个子路线(325)。在一些情况下,高度信息包括子路线中的每个gps坐标的高度。在一些情况下,高度信息包括子路线中的所选gps坐标的高度数据。在一些情况下,高度信息是从gps网格信息收集的。在一些情况下,与特定路线相关联的历史远程信息处理数据还包括指示与特定运输路线中的位置相关联的高度的数据。在一些情况下,与特定路线相关联的历史远程信息处理数据还包括与特定运输路线中的多个位置相关联的指示多个高度的数据。在一些情况下,高度数据是从运输车辆上的气压传感器收集的。在一些情况下,高度数据是从数据源取回的。在一个示例中,使用位置信息作为输入从数据源取回高度数据。
76.在一些情况下,电气化运输车辆系统被配置为使用机器学习模型生成多条路线和多条子路线。在一些实施方式中,电气化运输车辆系统被配置为使用历史远程信息处理数据和/或历史操作数据来训练机器学习模型(330)。在一些实施方式中,电气化运输车辆系统被配置为使用历史远程信息处理数据和/或历史操作数据的第一子集来训练机器学习模型。在一些情况下,使用预处理过程选择历史远程信息处理数据的第一子集。图4中示出了预处理训练数据的一个示例过程。
77.机器学习模型可以包括任何合适的机器学习模型、深度学习模型等。在一些实施方式中,机器学习模型包括决策树、随机森林、支持向量机、卷积神经网络、循环神经网络等中的至少一个。可选地,系统可以使用历史远程信息处理数据的第二子集来测试经训练的机器学习模型。在一个实施方式中,历史远程信息处理数据的第一子集和历史远程信息处理数据的第二子集不具有任何交叠的数据集。在另一实施方式中,历史远程信息处理数据的第一子集和历史远程信息处理数据的第二子集具有至少一个交叠的数据集。
78.在一些情况下,机器学习模型包括图像分类机器学习模型。在一些情况下,电气化运输车辆系统被配置为使用每个子路线的gps坐标生成曲线图并且训练机器学习模型以识别曲线图的形状。在一些实施方式中,机器学习模型包括神经网络。在一些情况下,神经网络包括多个层。在一个实施方式中,神经网络至少包括输入层、一个或更多个隐藏层和输出层。在一些实施方式中,神经网络的至少一个层用于远程信息处理数据。在一个示例中,机器学习模型被训练为使用远程信息处理数据识别位置。
79.在一些情况下,使用历史远程信息处理数据和历史操作数据来训练机器学习模型。操作数据包括例如电气化车辆的电池充电状态、行驶的距离、制动热效率和其它操作数据。在一些实施方式中,机器学习模型被训练为使用历史远程信息处理数据和历史操作数据来预测里程估计。在一个示例中,机器学习模型是神经网络,所述神经网络包括用于远程信息处理数据的输入层、用于操作数据的输入层、用于路线信息的输入层和/或用于里程估计的输出层。在一个实施方式中,机器学习模型包括多个机器学习模型,其中,第一机器学习模型被配置为采用远程信息处理数据和路线信息作为输入来预测路线,而第二机器学习模型被配置为获得所预测的路线并将操作数据作为输入来预测行驶里程。在一个示例中,第一机器学习模型包括图像分类机器学习模型。
80.在一些情况下,电气化运输车辆系统被配置为接收电气化运输车辆的位置信息(335)。在一些实施方式中,位置信息包括从电气化运输车辆的一个或更多个远程信息处理设备(例如,图1中的远程信息处理设备110)收集的数据。在一些情况下,位置信息包括从电气化运输车辆中的移动设备收集的数据。在一个示例中,位置信息包括gps坐标序列。在一个示例中,位置信息包括gps坐标的时间序列。在一些实施方式中,位置信息包括电气化运输车辆的速度信息和/或制动信息。
81.在一些实现方式中,电气化运输车辆系统被配置为基于位置信息确定电气化运输车辆的行程(340)。在一些情况下,电气化运输车辆采取多条不同的路线/子路线。在这些情况下,电气化运输车辆系统被配置为基于车辆的静止时间确定行程的起始位置。在一些情况下,如果静止时间大于阈值,则确定起始位置。在一个示例中,阈值是预定阈值。在另一示例中,电气化运输车辆系统被配置为例如基于所收集的远程信息处理数据、位置信息等来调整阈值。
82.在一些实施方式中,例如与所生成的子路线相比,电气化运输车辆系统被配置为确定行程的多个得分(345)。这些得分也称为子路线得分。在一些情况下,电气化运输车辆系统被配置为生成与电气化运输车辆的多条所选子路线相关联的多个得分,其中,多个得分中的每个得分与相应的子路线相关联并且基于电气化运输车辆的位置和相应的子路线之间的距离来生成。在一些情况下,距离是使用与位置相关联的gps坐标和与相应子路线相关联的gps坐标来确定的。在一些情况下,可以基于电气化运输车辆的多个位置和相应子路线来确定子路线的得分。在一个示例中,子路线的得分是基于电气化运输车辆的多个位置到相应子路线的最小距离来确定的。
83.在一个示例中,子路线的得分是基于电气化运输车辆的多个位置到相应子路线的参考位置的平均距离来确定的。在一个示例中,使用从位置到子路线的最短距离来计算位置到子路线的距离。例如,电气化运输车辆系统可以使用三角剖分算法来计算距离。在一些情况下,得分是基于所计算的到多个子路线的距离的归一化得分。在一个示例中,使用在子
路线中标识的参考位置的数量对得分进行归一化。在一些情况下,得分是使用经训练的机器学习模型确定的。在一些情况下,得分是使用经训练的人工神经网络确定的,其中,人工神经网络包括用于子路线得分的输出层。
84.在一些实现方式中,电气化运输车辆系统被配置为例如基于位置信息和/或多个得分来识别电气化运输车辆所采用的子路线(350)。在一个实施方式中,所识别的子路线具有针对子路线生成的得分中的最低子路线得分。在一些情况下,电气化运输车辆系统被配置为接收电气化运输车辆的工作状况(355)。在一些情况下,电气化运输车辆的工作状况可以包括例如电池充电状态、扭矩、制动热效率等。
85.在一些实施方式中,电气化运输车辆系统被配置为例如基于位置信息和所识别的子路线确定电气化运输车辆的里程估计(360)。在一些情况下,电气化运输车辆系统被配置为基于工作状况、位置信息和所识别的子路线来确定里程估计。在一些情况下,电气化运输车辆系统被配置为基于所识别的子路线的高度信息来确定里程估计。在一个示例中,高度信息用于预测电气化运输车辆在所识别的子路线中行驶时的未来功耗。在一些情况下,系统被配置为使用经训练的机器学习模型来预测里程估计。在一个示例中,使用经训练的人工神经网络来预测里程估计,其中,人工神经网络包括用于里程估计的输出层。
86.图4是描绘根据本公开的实施方式的预处理要用于训练机器学习模型的历史远程信息处理数据的说明性方法的示例流程图400。方法400的实施方式的多个方面可以例如由一个或更多个处理器或系统(例如,图1中的路线处理器120和/或里程处理器130、图1中的电气化运输车辆系统100)执行。方法400的一个或更多个步骤是可选的和/或可以通过本文描述的其它实施方式的一个或更多个步骤修改。此外,本文描述的其它实施方式的一个或更多个步骤可以添加到方法400。首先,电气化运输车辆系统被配置为接收运输路线的历史远程信息处理数据(410)。
87.历史远程信息处理数据可以从电气化运输车辆的相应远程信息处理设备生成。在一些情况下,与特定运输路线相关联的历史远程信息处理数据包括与特定运输路线相关联的gps坐标的序列。在一些情况下,与特定运输路线相关联的历史远程信息处理数据包括与特定运输路线相关联的gps坐标的时间序列。在一些情况下,与特定路线相关联的历史远程信息处理数据还包括指示与特定运输路线中的位置相关联的高度的数据。在一些情况下,与特定路线相关联的历史远程信息处理数据还包括与特定运输路线中的多个位置相关联的指示多个高度的数据。
88.在一些实施方式中,电气化运输车辆系统被配置为根据历史远程信息处理数据生成多个路线数据集(415)。在一些情况下,路线数据集是基于时间间隔(例如,大于阈值的静止时间)生成的。在一些情况下,路线数据集是基于运输路线信息根据与运输路线的匹配生成的。在一个示例中,系统被配置为从gtfs数据库取回运输路线信息。在另一示例中,运输数据源包括运输系统,并且电气化运输车辆系统被配置为经由软件接口(例如,api、web服务等)接收运输路线信息。
89.在一些实现方式中,系统被配置为识别针对每个路线数据集的相关路线(420)。在一个示例中,每个路线数据集被用于生成曲线图,并且系统使用该曲线图来识别相关路线/子路线。在一个示例中,系统被配置为确定指示路线数据集与运输路线/子路线的相似性的置信值。在一些情况下,系统可以生成每个路线数据集的得分(425)。在一个示例中,该得分
包括指示与所识别的相关路线的相似性的置信值。在一个示例中,基于路线数据集中的位置数据与所识别的相关路线之间的距离来生成得分。在一些情况下,可以基于路线数据集中的多个位置和所识别的相关路线来确定路线数据集的得分。在一个示例中,基于多个位置到所识别的相关路线的最小距离来生成路线数据集的得分。
90.在一个示例中,基于路线数据集中的多个位置到所识别的相关路线的参考位置的平均距离来生成路线数据集的得分。在一个示例中,使用从位置到路线的最短距离来计算位置到路线的距离。例如,路线处理器可以使用三角剖分算法来计算距离。在一个示例中,使用在路线中标识的参考位置的数量对得分进行归一化。在一些情况下,得分是使用经训练的机器学习模型来确定的。在一些情况下,得分是使用经训练的人工神经网络确定的,其中,人工神经网络包括用于子路线得分的输出层。
91.在一些实施方式中,电气化运输车辆系统被配置为基于得分生成一组训练数据(430)。在一个示例中,该组训练数据包括具有大于阈值的得分的路线数据集。在一些实现方式中,系统被配置为基于得分生成一组测试数据(435)。在一些情况下,该组测试数据包括具有大于阈值的得分的路线数据集。在一些情况下,该组测试数据包括具有低于阈值的得分的一个或更多个路线数据集。
92.图5描绘了根据本公开的主题的实施方式的电气化运输车辆环境500的示意图。在一些实现方式中,电气化运输车辆环境500的一个或更多个组件可以是可选的。在一些实现方式中,电气化运输车辆环境500可以包括图中未示出的其它组件。在所示示例中,电气化运输车辆环境500包括一个或更多个电气化运输车辆510(例如,电气化运输车辆532、电气化运输车辆534、电气化运输车辆536)、电气化运输车辆系统540(例如,图1中所示的电气化运输车辆系统100)、运输控制器550和运输数据源560。系统540可以从运输数据源560接收运输路线信息565。在一个示例中,运输数据源560包括gtfs数据库,其中,系统540从gtfs数据库取回运输路线信息。在另一示例中,运输数据源560包括运输系统,并且电气化运输车辆系统540被配置为经由软件接口(例如,api、web服务等)接收运输路线信息。
93.在一些实施方式中,运输路线信息565包括特定运输路线520的信息。在一些示例中,特定运输路线520包括预设起始位置522、预设结束位置524和一个或更多个预设运输停靠位置525。在某些示例中,预设起始位置522与预设结束位置524处于相同位置,如图5所示。
94.在某些实施方式中,特定运输路线520包括子路线526和子路线527。如图所示,子路线526具有与子路线527不同的路径。在一个示例中,电气化运输车辆534在子路线526上。
95.电气化运输车辆系统540可以接收一个或更多个电气化运输车辆510的操作数据。操作数据包括例如速度、发动机功率水平、扭矩、一个或更多个电池组中的至少一个电池组的电池健康状况(例如,保持电荷的效率)、电池充电状态(soc)、制动热效率(bte)等。操作数据还可包括车辆传感器数据,诸如,例如噪声数据、振动数据、粗糙度数据、排气温度、催化剂温度、高度数据等。在一些实施方式中,电气化运输车辆包括高度传感器,例如,气压传感器。在一些示例中,电气化运输车辆532的电池健康状况与电气化运输车辆534的电池健康状况不同。在某些示例中,电气化运输车辆532的电池健康状况与电气化运输车辆536的电池健康状况不同。
96.在一些实现方式中,电气化运输车辆系统540被配置为接收运输路线的历史远程
信息处理数据。在一些情况下,电气化运输车辆系统540被配置为从数据储存库取回历史远程信息处理数据。历史远程信息处理数据可以从电气化运输车辆510的相应远程信息处理设备生成。在一些情况下,与特定运输路线相关联的历史远程信息处理数据包括与特定运输路线相关联的gps坐标的时间序列。在一些情况下,与特定路线相关联的历史远程信息处理数据还包括指示与特定运输路线中的位置相关联的高度的数据。在一些情况下,与特定路线相关联的历史远程信息处理数据还包括与特定运输路线中的多个位置相关联的指示多个高度的数据。在一些情况下,高度数据是从运输车辆上的气压传感器收集的。在一些情况下,高度数据是从数据源取回的。在一个示例中,使用位置信息作为输入从数据源取回高度数据。
97.在一些实施方式中,电气化运输车辆系统540被配置为生成多条路线和多条子路线,其中,多条路线中的每条路线包括具有彼此不同的路径的一条或更多条子路线。在一些情况下,子路线包括gps坐标序列。在一些实现方式中,路线的多条子路线具有彼此不同的路径/方向,而多条子路线(例如,子路线526、子路线527)具有相同的起始位置522、相同的结束位置524和一个或更多个相同的运输停靠位置525。在某些实现方式中,路线的多条子路线具有彼此不同的路径/方向,而多条子路线具有相同的起始位置、相同的结束位置和一个或更多个相同的运输停靠位置。在一些情况下,子路线包括gps坐标的时间序列。在一些情况下,具有第一方向的路线与具有与第一方向相反的第二方向的路线是不同的子路线。在一些实现方式中,每个子路线在被绘制时具有相关联的形状。在一些实施方式中,子路线包括关于路线的更多信息,例如,高度信息。
98.在一些情况下,电气化运输车辆系统540被配置为处理运输路线信息以生成多条路线和多条子路线。在一些实施方式中,电气化运输车辆系统540被配置为识别路线变化,以生成多条路线和多条子路线。在一些情况下,如果静止时间大于阈值,则确定路线变化。在一个示例中,阈值是预定阈值。在一些情况下,子路线包括gps坐标序列以及与该gps坐标序列中的一个gps坐标相关联的至少一个高度。在一些情况下,子路线包括gps坐标序列和相关联的高度。
99.在一些情况下,电气化运输车辆系统540被配置为处理历史远程信息处理数据以更新多条路线和多条子路线。在一些情况下,电气化运输车辆系统540被配置为处理运输路线信息和历史远程信息处理数据以生成多条路线和多条子路线。在一个示例中,如果电气化运输车辆(例如,电气化运输车辆534)位于特定路线520上的位置,则可以创建子路线526。在一些示例中,电气化运输车辆系统540被配置为例如使用历史远程信息处理数据用高度信息更新多个子路线。在一些情况下,高度信息包括子路线中的每个gps坐标的高度。在一些情况下,高度信息包括子路线中的所选gps坐标的高度数据。在一些情况下,高度信息是从gps网格信息收集的。在一些情况下,电气化运输车辆系统540被配置为使用经训练的机器学习模型生成多条路线和多条子路线,其中,使用历史远程信息处理数据的至少一部分来训练机器学习模型。
100.在一些实施方式中,电气化运输车辆系统540被配置为使用历史远程信息处理数据和/或历史操作数据来训练机器学习模型。在一些实施方式中,电气化运输车辆系统540被配置为使用历史远程信息处理数据和/或历史操作数据的第一子集来训练机器学习模型。在一些情况下,使用预处理过程选择历史远程信息处理数据的第一子集。机器学习模型
可以包括任何合适的机器学习模型、深度学习模型等。在一些实施方式中,机器学习模型包括决策树、随机森林、支持向量机、卷积神经网络、循环神经网络等中的至少一种。可选地,电气化运输车辆系统540可以使用历史远程信息处理数据和/或历史操作数据的第二子集来测试经训练的机器学习模型。在一个实施方式中,历史远程信息处理数据和/或历史操作数据的第一子集以及历史远程信息处理数据和/或历史操作数据的第二子集没有任何交叠的数据集。在另一实施方式中,历史远程信息处理数据的第一子集和历史远程信息处理数据的第二子集具有至少一个交叠的数据集。
101.在一些情况下,机器学习模型包括图像分类机器学习模型。在一些情况下,电气化运输车辆系统540被配置为使用每个子路线的gps坐标生成曲线图(例如,类似于路线和/或子路线520、526、527),并且训练机器学习模型以识别曲线图的形状。在一些实施方式中,机器学习模型包括神经网络。在一些情况下,神经网络包括多个层。在一个实施方式中,神经网络至少包括输入层、一个或更多个隐藏层和输出层。在一些实施方式中,神经网络的至少一个输入层用于远程信息处理数据。在一些实施方式中,神经网络的至少一个输入层用于操作数据。在一个示例中,机器学习模型被训练为使用远程信息处理数据识别位置。
102.在一些情况下,使用历史远程信息处理数据和历史操作数据来训练机器学习模型。操作数据包括例如电气化车辆的电池充电状态、行驶的距离、制动热效率和其它操作数据。在一些实施方式中,机器学习模型被训练为使用历史远程信息处理数据和历史操作数据来预测里程估计。在一个示例中,机器学习模型是神经网络,所述神经网络包括用于远程信息处理数据的输入层、用于操作数据的输入层、用于路线信息的输入层和/或用于里程估计的输出层。在一个实施方式中,机器学习模型包括多个机器学习模型,其中,第一机器学习模型被配置为采用远程信息处理数据和路线信息作为输入来预测路线,而第二机器学习模型被配置为获得所预测的路线并将操作数据作为输入来预测行驶里程。在一个示例中,第一机器学习模型包括图像分类机器学习模型。
103.在一些情况下,电气化运输车辆系统540被配置为接收电气化运输车辆的位置信息。在一些实施方式中,位置信息包括从电气化运输车辆510的一个或更多个远程信息处理设备收集的数据。在一些情况下,位置信息包括从电气化运输车辆中的移动设备收集的数据。在一个示例中,位置信息包括gps坐标序列。在一个示例中,位置信息包括gps坐标的时间序列。在一些实施方式中,位置信息包括电气化运输车辆的速度信息和/或制动信息。
104.在一些实施方式中,例如与所生成的子路线相比,电气化运输车辆系统540被配置为确定与行程相关联的多个得分。这些得分也称为子路线得分。在一些情况下,电气化运输车辆系统540被配置为确定与电气化运输车辆的多条所选子路线相关联的多个得分,其中,多个得分中的每个得分与相应的子路线相关联并且基于电气化运输车辆的位置和相应的子路线之间的距离来生成。在一些情况下,距离是基于gps坐标确定的。在一些情况下,可以基于电气化运输车辆的多个位置和相应子路线来确定子路线的得分。在一个示例中,子路线的得分是基于电气化运输车辆的多个位置到相应子路线的最小距离确定的。
105.在一个示例中,子路线的得分是基于电气化运输车辆的多个位置到相应子路线的参考位置的平均距离确定的。在一个示例中,使用从位置到子路线的最短距离来计算位置到子路线的距离。例如,电气化运输车辆系统540可以使用三角剖分算法来计算距离。在一些情况下,得分是基于所计算的到多条子路线的距离的归一化得分。在一个示例中,使用在
子路线中标识的参考位置的数量对得分进行归一化。在一些情况下,得分是使用经训练的机器学习模型确定的。在一些情况下,得分是使用经训练的人工神经网络确定的,其中,人工神经网络包括子路线得分的输出层。
106.在一些实现方式中,电气化运输车辆系统540被配置为例如基于位置信息和/或多个得分来识别电气化运输车辆所采用的子路线。在一个实施方式中,所识别的子路线具有针对子路线确定的得分中的最低子路线得分。在某些示例中,电气化运输车辆系统540被配置为接收电气化运输车辆的工作状况。在一些示例中,电气化运输车辆的工作状况可以包括例如电池健康状况、电池充电状态、扭矩、制动热效率等。
107.在一些实施方式中,电气化运输车辆系统540被配置为例如基于位置信息、所识别的子路线和与所识别的子路线相关联的特定路线的一个或更多个运输停靠位置中的至少一个来确定电气化运输车辆的里程估计。在一些实现方式中,电气化运输车辆系统540被配置为基于工作状况/数据、位置信息、所识别的子路线和运输停靠位置以及结束位置来确定里程估计。在一些示例中,电气化运输车辆系统540确定针对在一天中的不同时间行驶的同一电气化运输车辆在同一运输路线的同一位置处的不同里程估计。在某些示例中,电气化运输车辆系统540确定针对在不同子路线行驶的同一电气化运输车辆在同一运输路线的同一位置处的不同里程估计。在一些示例中,电气化运输车辆系统540确定针对具有不同电池健康状况的两个电气化运输车辆在同一运输路线的同一位置处的不同里程估计。
108.在一些实现方式中,电气化运输车辆系统540被配置为至少部分地基于所识别的子路线的高度信息来确定里程估计。在一个示例中,高度信息被用于预测电气化运输车辆在所识别的子路线(例如,子路线527)中行驶时的未来功耗。在一些示例中,电气化运输车辆系统540被配置为使用经训练的机器学习模型来预测里程估计。在一个示例中,使用经训练的人工神经网络来预测里程估计,其中,人工神经网络包括用于里程估计的输出层。
109.在一些实施方式中,电气化运输车辆系统540可以使用从历史数据(例如,在行驶的距离上消耗的能量)中学习的自适应算法来确定车辆以电池中可用的剩余能量可以行驶的距离。利用所识别的车辆正行驶的子路线信息,可以提高里程估计的精度。
110.在某些实施方式中,电气化运输车辆系统540向运输控制器550发送里程估计的第一指示。在一些示例中,运输控制器550允许操作员监视、控制和/或管理运输车辆510。在某些示例中,运输控制器550实现允许操作员监视、控制和/或管理运输车辆510的门户。在一些示例中,运输控制器550的门户包括一个或更多个警报和/或消息。在某些示例中,电气化运输车辆系统540向电气化运输车辆510发送里程估计的第二指示,其中,第二指示可以呈现在运输车辆510的仪表板535中。
111.在某些实施方式中,电气化运输车辆系统540被配置为至少部分地基于特定路线520、所识别的子路线(例如,子路线526)、接收到的位置信息以及特定路线520的预设结束位置524确定电气化运输车辆510到达特定路线520的预设结束位置524的剩余时间。在一些示例中,电气化运输车辆系统540被配置为将剩余时间发送到运输控制器550。
112.在不脱离本发明的范围的情况下,可以对所讨论的示例性实施方式进行各种修改和添加。例如,虽然上述实施方式是指特定特征,但本发明的范围还包括具有不同特征组合的实施方式和不包括所有上述特征的实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1