一种基于北斗定位的电力杆塔倾斜沉降监测系统及方法与流程
1.本技术涉及杆塔监测技术领域,尤其涉及一种基于北斗定位的电力杆塔倾斜沉降监测系统及方法。
背景技术:
2.目前,电网公司业务领域的定位导航应用仍是大量采用gps终端设备,无法保证电网空间信息的安全。因此亟待推广电力北斗应用,逐步由北斗gps兼容过渡至最终北斗全面替代gps,消除对国外卫星导航系统的依赖,保障电网安全发展。随着北斗三号系统全面建成以及电力行业北斗系统服务能力的增强,电网公司可以深度推进电力行业北斗业务需求,提升北斗在电力行业应用的深度与广度。
3.由于自然灾害和地质因素的影响,电力杆塔会出现沉降、位移和倾斜的问题,从而导致电力杆塔不稳定,甚至造成电力的中断,并且电力设施经常建在地面不稳定的地区,或者地质灾害多发区。由于地表沉降、山体滑坡,导致电力杆塔发生倾斜、沉降,当偏移量超过一定的值,电力杆塔就会倒塌。自然灾害也会导致电力杆塔的负荷变大,负荷超过一定值时,电力杆塔就会变形、倾斜。大风和雷电的天气,也会导致电力杆塔发生大幅度的晃动。基于以上几种情况,因此需要对电力杆塔进行实时的监测,掌握状态,在事故发生之前采取预防措施,以免造成巨大的损失。
4.电力杆塔目前还是靠人工巡检为主,无人机巡检为辅,浪费了大量的人力和物力,而且没有办法进行提前预警,只能做到事后报警。
技术实现要素:
5.本技术提供了一种基于北斗定位的电力杆塔倾斜沉降监测系统及方法,以解决现有技术中,电力杆塔目前还是靠人工巡检为主,无人机巡检为辅,浪费了大量的人力和物力,而且没有办法进行提前预警,只能做到事后报警的技术问题。
6.本技术第一方面公开了一种基于北斗定位的电力杆塔倾斜沉降监测系统,包括北斗基准站、监测设备和杆塔监测平台;
7.所述北斗基准站用于获取所述北斗基准站对北斗卫星的实时观测信息;
8.所述监测设备设置在待测电力杆塔上,所述监测设备包括北斗接收机和rtk定位模块;其中,所述北斗接收机用于获取待处理信息,所述待处理信息包括所述北斗基准站对北斗卫星的实时观测信息、所述北斗基准站的位置信息、所述北斗接收机对所述北斗卫星的实时观测信息;
9.所述rtk定位模块用于根据所述待处理信息,利用北斗载波相位差分定位技术,确定待测电力杆塔的定位信息和待测电力杆塔倾斜度,并上传至所述杆塔监测平台。
10.可选的,所述监测设备还包括应力监测模块,所述应力监测模块设置在待测电力杆塔的塔体或者塔基上,用于在监测到异常受力变化时,获取相应的形变数据并上传至所述杆塔监测平台。
11.可选的,所述监测设备还包括环境监测模块,所述环境监测模块用于监测待测电力杆塔所处位置的气象环境信息,并将相应的气象环境信息上传至所述杆塔监测平台。
12.可选的,所述监测设备还包括数据处理模块、本地存储模块、移动通信模块和安全加密模块;
13.其中,所述数据处理模块用于对所述待处理信息进行处理,确定待测电力杆塔的定位信息和待测电力杆塔倾斜度;
14.所述本地存储模块用于存储所述待处理信息;
15.所述移动通信模块用于将处理后的信息上传至所述杆塔监测平台;
16.安全加密模块用于对信息进行加密。
17.可选的,所述监测设备还包括北斗短报文模块,用于在所述移动通信模块失效时进行应急通信。
18.可选的,所述监测设备还包括供电装置,所述供电装置包括太阳能板、电源管理模块和备用电池模块;
19.其中,所述太阳能板用于对所述监测设备进行供能;
20.所述电源管理模块用于在所述太阳能板供能不足时,使用所述备用电池模块对所述监测设备供能。
21.可选的,所述rtk定位模块通过以下步骤确定待测电力杆塔的定位信息和待测电力杆塔的倾斜度:
22.根据所述待处理信息,确定所述监测设备的位置信息;通过所述监测设备的位置信息,确定待测电力杆塔的定位信息;所述监测设备的位置信息使用的坐标系为大地坐标系;
23.将所述监测设备的位置信息使用的大地坐标系转换为站心坐标系;
24.根据站心坐标系下所述监测设备的位置信息,确定待测电力杆塔的水平偏移和垂直偏移;
25.根据待测电力杆塔的水平偏移和垂直偏移,确定待测电力杆塔的倾斜度。
26.可选的,所述根据所述待处理信息,确定所述监测设备的位置信息,包括:
27.根据所述待处理信息,获取所述监测设备对两个不同北斗卫星的载波相位观测值,并确定两个监测设备观测方程;以及获取所述北斗基准站对所述两个不同北斗卫星的载波相位观测值,确定两个北斗基准站观测方程;
28.根据所述两个监测设备观测方程和所述两个北斗基准站观测方程,针对任一北斗卫星,确定一个单差观测方程;
29.确定两个单差观测方程;
30.对所述两个单差观测方程进行双差,确定双差载波相位观测值;
31.根据所述双差载波相位观测值,确定载波相位双差观测方差;
32.根据所述载波相位双差观测方差和所述北斗基准站的位置信息,通过解算所述北斗基准站和所述监测设备的基线向量,确定所述监测设备的位置信息。
33.可选的,所述将所述监测设备的位置信息使用的坐标系转换为站心坐标系,包括:
34.将所述监测设备的位置信息使用的大地坐标系转换为直角坐标系;
35.再将所述监测设备的位置信息使用的直角坐标系转换为站心坐标系。
36.本技术第二方面公开了一种基于北斗定位的电力杆塔倾斜沉降监测方法,包括:
37.获取待处理信息,所述待处理信息包括北斗基准站对北斗卫星的实时观测信息、北斗基准站的位置信息、北斗接收机对所述北斗卫星的实时观测信息;
38.根据所述待处理信息,利用北斗载波相位差分定位技术,确定待测电力杆塔的定位信息和待测电力杆塔倾斜度。
39.本技术涉及杆塔监测技术领域,公开了一种基于北斗定位的电力杆塔倾斜沉降监测系统及方法。该系统包括北斗基准站、监测设备和杆塔监测平台,其中,北斗基准站用于获取北斗基准站对北斗卫星的实时观测信息,监测设备设置在待测电力杆塔上,监测设备包括北斗接收机和rtk定位模块,北斗接收机用于获取待处理信息,rtk定位模块通过利用北斗定位技术,获取待测电力杆塔的定位信息和待测电力杆塔倾斜度并上传至杆塔监测平台。本技术提供的电力杆塔倾斜沉降监测系统可以对电力杆塔进行实时的监测,实时掌握电力杆塔的定位和倾斜度状态,在事故发生之前采取预防措施,以免产生巨大的损失。
附图说明
40.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
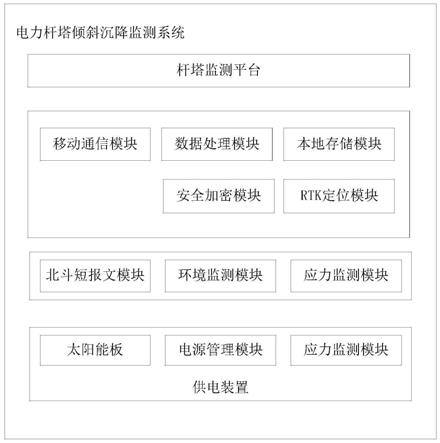
41.图1为本技术实施例提供的一种基于北斗定位的电力杆塔倾斜沉降监测系统的结构示意图;
42.图2为本技术实施例提供的rtk定位模块的执行步骤流程图。
43.图3为本技术实施例提供的一种基于北斗定位的电力杆塔倾斜沉降监测系统中,确定监测设备的位置信息的执行步骤流程图。
具体实施方式
44.下面将详细地对实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下实施例中描述的实施方式并不代表与本技术相一致的所有实施方式。仅是与权利要求书中所详述的、本技术的一些方面相一致的系统和方法的示例。
45.为了解决现有技术中,电力杆塔目前还是靠人工巡检为主,无人机巡检为辅,浪费了大量的人力和物力,而且没有办法进行提前预警,只能做到事后报警的技术问题,本技术通过以下两个实施例公开了一种基于北斗定位的电力杆塔倾斜沉降监测系统及方法。
46.参见图1,本技术第一实施例公开了一种基于北斗定位的电力杆塔倾斜沉降监测系统,包括北斗基准站、监测设备和杆塔监测平台。
47.所述北斗基准站用于获取所述北斗基准站对北斗卫星的实时观测信息。
48.所述监测设备设置在待测电力杆塔上,所述监测设备包括北斗接收机和rtk(real time kinematic,实时动态测量)定位模块。其中,所述北斗接收机用于获取待处理信息,所述待处理信息包括所述北斗基准站对北斗卫星的实时观测信息、所述北斗基准站的位置信息、所述北斗接收机对所述北斗卫星的实时观测信息。
49.所述rtk定位模块用于根据所述待处理信息,利用北斗载波相位差分定位技术,确
定待测电力杆塔的定位信息和待测电力杆塔倾斜度,并上传至所述杆塔监测平台。rtk定位模块能够获取杆塔高精度的定位信息,实现“快速、准确、可靠”的高精度实时动态定位。还可以检测塔体偏移程度,采用了位移传感器,实现较高精度位移角度的采集。
50.本技术上述实施例公开的基于北斗定位的电力杆塔倾斜沉降监测系统,包括北斗基准站、监测设备和杆塔监测平台,其中,北斗基准站用于获取北斗基准站对北斗卫星的实时观测信息,监测设备设置在待测电力杆塔上,监测设备包括北斗接收机和rtk定位模块,北斗接收机用于获取待处理信息,rtk定位模块通过利用北斗定位技术,获取待测电力杆塔的定位信息和待测电力杆塔倾斜度并上传至杆塔监测平台。本技术提供的电力杆塔倾斜沉降监测系统可以对电力杆塔进行实时的监测,实时掌握电力杆塔的定位和倾斜度状态,在事故发生之前采取预防措施,以免产生巨大的损失。
51.在本技术的部分实施例中,所述监测设备还包括应力监测模块,所述应力监测模块设置在待测电力杆塔的塔体或者塔基上,用于在监测到异常受力变化时,获取相应的形变数据并上传至所述杆塔监测平台。具体来说,应力监测模块包括应力传感器,固定在塔体或者塔基上的应力传感器在感应到塔体有异常受力变化时,会检测到相应的形变数据,相关数据会上传到杆塔监测平台中。
52.在本技术的部分实施例中,所述监测设备还包括环境监测模块,所述环境监测模块用于监测待测电力杆塔所处位置的气象环境信息,并将相应的气象环境信息上传至所述杆塔监测平台。具体来说,环境监测模块用于监测电力杆塔附近的气象环境情况,例如湿度、温度、风力、下雨情况等。气象数据会上传到平台中,便于检修人员对电力杆塔进行维护。
53.在本技术的部分实施例中,所述监测设备还包括数据处理模块、本地存储模块、移动通信模块和安全加密模块。
54.其中,所述数据处理模块用于对所述待处理信息进行处理,确定待测电力杆塔的定位信息和待测电力杆塔倾斜度。
55.所述本地存储模块用于存储所述待处理信息。
56.所述移动通信模块用于将处理后的信息上传至所述杆塔监测平台。
57.安全加密模块用于对信息进行加密。
58.具体来说,rtk定位模块、应力监测模块和环境监测模块实时采集相关数据,并对数据进行整合、分析并且上传。待测电力杆塔高精度的定位信息通过rtk定位模块获取,rtk定位模块获取的数据均存储在本地存储模块中,数据通过安全加密模块加密,通过移动通信模块上传到杆塔监测平台,上传的数据在杆塔监测平台上可以显示并实时监控,具有预警功能,通过显示的数据,供运维人员进行判断。
59.在本技术的部分实施例中,所述监测设备还包括北斗短报文模块,用于在所述移动通信模块失效时进行应急通信。
60.在本技术的部分实施例中,所述监测设备还包括供电装置,所述供电装置包括太阳能板、电源管理模块和备用电池模块。
61.其中,所述太阳能板用于对所述监测设备进行供能。监测装置安装在待测电力杆塔上,采用太阳能进行供电。
62.所述电源管理模块用于在所述太阳能板供能不足时,使用所述备用电池模块对所
述监测设备供能。
63.在本技术的部分实施例中,参见图2,所述rtk定位模块通过以下步骤确定待测电力杆塔的定位信息和待测电力杆塔倾斜度:
64.步骤s101,根据所述待处理信息,确定所述监测设备的位置信息;通过所述监测设备的位置信息,确定待测电力杆塔的定位信息。所述监测设备的位置信息使用的坐标系为大地坐标系。
65.进一步的,参见图3,所述根据所述待处理信息,确定所述监测设备的位置信息,包括:
66.步骤s1011,根据所述待处理信息,获取所述监测设备对两个不同北斗卫星的载波相位观测值,并确定两个监测设备观测方程。以及获取所述北斗基准站对所述两个不同北斗卫星的载波相位观测值,确定两个北斗基准站观测方程。
67.其中,在北斗定位研究中,以北斗载波相位差分定位技术为核心,北斗接收机工作时,接收从基准站发的观测信息,和基准站自身的位置信息,再根据自身的观测信息进行定位,可以提高定位的准确度。北斗接收机接收北斗基准站发出的差分信息(载波相位信息),叠加北斗接收机自己观测的位置坐标,可以计算出北斗接收机天线的位置。北斗接收机接收的差分信息为rtcm格式,对差分信息进行解码再求解。
68.具体来说,利用北斗基准站b和监测设备p分别对北斗卫星i和北斗卫星j进行观测,得出以下公式:
[0069][0070][0071][0072][0073]
其中,表示北斗基准站对北斗卫星i的北斗观测量;表示北斗基准站对北斗卫星j的北斗观测量;表示监测设备p(北斗接收机)对北斗卫星i的北斗观测量;表示监测设备p(北斗接收机)对北斗卫星j的北斗观测量;表示北斗基准站实时测量的北斗卫星i信号的载波相位观测值;表示北斗基准站实时测量的北斗卫星j信号的载波相位观测值;表示监测设备p(北斗接收机)实时测量的北斗卫星i信号的载波相位观测值;表示监测设备p(北斗接收机)实时测量的北斗卫星j信号的载波相位观测值;si(t)表示北斗卫星i发射信号相位;sj(t)表示北斗卫星j发射信号相位;和表示预先确定的以周为单位的单差整周模糊度;和表示预先确定的载波相位观测噪声;ω表示预先确定的载波频率;d
t,i
和d
t,j
表示卫星钟差;d
t,b
和d
t,p
表示(北斗接收机)钟差。
[0074]
步骤s1012,根据所述两个监测设备观测方程和所述两个北斗基准站观测方程,针对任一北斗卫星,确定一个单差观测方程。
[0075]
步骤s1013,确定两个单差观测方程。
[0076]
具体来说,对四个观测方程求单差,确定两个单差观测方程,如下所示:
[0077][0078][0079]
这样可以消掉北斗卫星发射信号相位,修复卫星时钟误差、卫星星历误差以及电离层超前载波和对流层载波延迟。其中,表示北斗基准站b和监测设备p(北斗接收机)对北斗卫星i形成的单差,表示北斗基准站b和监测设备p(北斗接收机)对北斗卫星j形成的单差。
[0080]
步骤s1014,对所述两个单差观测方程进行双差,确定双差载波相位观测值。
[0081]
具体来说,确定双差载波相位观测值如下所示:
[0082][0083]
已知基准站的精确坐标位置,通过解算基准站和监测设备的基线向量,则可准确得到监测设备的位置。
[0084]
步骤s1015,所述双差载波相位观测值,确定载波相位双差观测方差。
[0085]
具体来说,载波相位双差观测方差通过如下公式确定:
[0086][0087]
其中,λ表示预先确定的载波的波长;表示通过卫星伪距测量得到的双差几何距离;表示双差整周模糊度,通过数学方法计算得到,例如经典待定系数法,多普勒法等;δ表示预先确定的载波相位观测误差。
[0088]
步骤s1016,根据所述载波相位双差观测方差和所述北斗基准站的位置信息,通过解算所述北斗基准站和所述监测设备的基线向量,确定所述监测设备的位置信息。
[0089]
具体来说,将步骤s1015的公式线性化得到:
[0090][0091]
其中,m,n,l是计算得出的线性化的三个坐标的系数,dx,dy,dz是基线向量的增量,表示公式线性化之后得到的常数。
[0092]
如果卫星的数量为m,那么可以得出矩阵如下:
[0093][0094]
由以上步骤可以确定所述监测设备的位置信息,即确定待测电力杆塔的定位信息。
[0095]
步骤s102,将所述监测设备的位置信息使用的大地坐标系转换为站心坐标系。
[0096]
进一步的,所述将所述监测设备的位置信息使用的坐标系转换为站心坐标系,包
括:
[0097]
将所述监测设备的位置信息使用的大地坐标系转换为直角坐标系。
[0098]
再将所述监测设备的位置信息使用的直角坐标系转换为站心坐标系。
[0099]
具体来说,监测设备使用的坐标系为大地坐标系,需要转换成地心坐标系,需要进行两次转换。令(l,b,h)为大地坐标,(x,y,z)为直角系坐标,将大地系坐标转换为直角系坐标,公式如下:
[0100][0101]
其中,n表示地球的圆曲率半径,e为地球的偏心率,然后把上面公式的直角坐标系转换为站心坐标系,假设某点q的坐标为(x1,y2,z3),则向量oq的坐标,在站心坐标系下,可以表示为:
[0102][0103]
步骤s103,根据站心坐标系下所述监测设备的位置信息,确定待测电力杆塔的水平偏移和垂直偏移。
[0104]
具体来说,将步骤s101得到的待测电力杆塔的定位信息带入步骤s102的式子,可以得到偏移量δx和δy。
[0105]
步骤s104,根据待测电力杆塔的水平偏移和垂直偏移,确定待测电力杆塔的倾斜度。
[0106]
待测电力杆塔的倾斜度ρ通过如下公式确定:
[0107][0108]
其中,h表示预先确定的待测电力杆塔的高度。
[0109]
以下为本技术实施例提供的方法实施例,对于本技术方法实施例中未详细公开的内容,请参见本技术系统实施例。
[0110]
本技术第二实施例公开了一种基于北斗定位的电力杆塔倾斜沉降监测方法,包括:
[0111]
获取待处理信息,所述待处理信息包括北斗基准站对北斗卫星的实时观测信息、北斗基准站的位置信息、北斗接收机对所述北斗卫星的实时观测信息。
[0112]
根据所述待处理信息,利用北斗载波相位差分定位技术,确定待测电力杆塔的定位信息和待测电力杆塔倾斜度。
[0113]
以上结合具体实施方式和范例性实例对本技术进行了详细说明,不过这些说明并不能理解为对本技术的限制。本领域技术人员理解,在不偏离本技术精神和范围的情况下,可以对本技术技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本技术的范围内。本技术的保护范围以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1