一种多源车辆信息匹配方法与流程
1.本发明属于交通信息化领域,涉及一种多源车辆信息匹配方法。
背景技术:
2.非现场执法系统作为公路超限治理的新兴手段,在交通领域远景广阔。但是,由于系统分车方式使用来车线圈与离车线圈分离的模式,在跟车距离过小的情况下,容易出现前车未驶离离车线圈,后车已进入来车线圈,在此异常情况下,如果仅仅根据单一检测号分离匹配车辆信息,会导致检测号错位的问题;同时,称重数据收尾信号与车尾抓拍触发信号一致,由于,称重数据的处理时间与车尾抓拍摄像机抓图处理时间基本一致,车尾抓拍图片与称重数据生成时序不固定,导致车尾图片匹配具有随机性。
技术实现要素:
3.本发明的目的是针对现有非现场执法系统近距离跟车导致车辆信息匹配异常的问题,提供一种多源车辆信息匹配方法,解决车头抓拍图片、车尾抓拍图片及称重数据匹配错位问题。
4.本发明采用的技术方案是:一种多源车辆信息匹配方法,其特征在于,根据不同车道号laneno分别设置检测号checkid,用以区分不同车道车辆信息;根据不同车道号laneno分别设置抓拍标记cflag,用以标记当前车辆队列中车辆车尾抓拍完成情况;根据不同车道号laneno分别设置收尾标记eflag,用以标记当前车辆队列中车辆称重收尾完成情况;最终称重数据收尾完成时刻,根据车头抓拍图片检测号、车尾抓拍图片检测号及称重数据检测号匹配同一车辆信息。
5.具体实施步骤如下:
6.(1)区分不同车道车辆信息:每一个车道号laneno分别设置检测号checkid,当前车辆收尾称重数据采集完毕时,根据laneno获取当前车道当前车辆的checkid,然后将checkid更新递增加一;
7.(2)标记车辆抓拍完成情况:每一个车道号laneno分别设置抓拍完成情况标记cflag,在无车状态下,cflag默认值为0,车辆触发来车线圈调用车头抓拍时,cflag递增加一,车辆离开离车线圈触发车尾抓拍时,cflag递减减一;
8.(3)标记车辆收尾完成情况:每一个车道号laneno分别设置收尾完成情况标记eflag,在无车状态下,eflag默认值为0,车辆触发来车线圈调用车头抓拍时,eflag递增加一,车辆离开离车线圈称重数据收尾时,eflag递减减一;
9.(4)信息匹配规则:根据laneno查询对应车道车辆的checkid;车头抓拍触发时,查询对应车道eflag,计算车头抓拍检测号为checkid+eflag;车尾抓拍触发时,查询对应车道eflag及cflag,计算cflag-eflag的值,判断值若为0,则车尾抓拍图片检测号为checkid,判断值若不为0,则车尾抓拍图片检测号为checkid-1;称重数据收尾时,称重数据检测号为checkid;最终,将检测号相同的车头抓拍图片、车尾抓拍图片及称重数据匹配为同一车辆
的信息。
10.其中,根据不同车道号laneno分别设置检测号checkid,用以区分不同车道车辆信息.
11.其中,根据不同车道号laneno分别设置抓拍标记cflag,用以标记当前车辆队列中车辆车尾抓拍完成情况。
12.其中,根据不同车道号laneno分别设置收尾标记eflag,用以标记当前车辆队列中车辆称重收尾完成情况。
13.其中,最终称重数据收尾完成时刻,根据车头抓拍图片检测号、车尾抓拍图片检测号及称重数据检测号匹配同一车辆信息。
14.与传统方法相比,本发明具有以下有益效果:
15.利用抓拍完成标记cflag和收尾完成标记eflag,可以掌握车辆抓拍完成时间节点及车辆完全通过时间节点,解决以往单一检测号匹配方法不能区分跟车车辆的问题,在近距离连续跟车的条件下,有效地完成车头抓拍图片、车尾抓拍图片及车辆称重数据的信息匹配。
附图说明
16.图1是非现场执法系统分车布局示意图。
17.图2是近距离跟车场景示意图。
18.图3是三辆连续过车方法流程图。
具体实施方式
19.以下结合附图对本发明进行完整的说明。
20.非现场执法系统分车布局如图1所示,由来车线圈、离车线圈和一个称重秤台组成。
21.以三轴货车为例,近距离跟车场景如图2所示,前车车尾未完全离开离车线圈,后车车头已经进入来车线圈。
22.以一车道来车,前后货车近距离跟车场景为例,每个过程具体实施步骤如下:
23.(1)区分不同车道车辆信息:根据车道号为一车道(laneno=1),查询一车道此时间节点检测号为n,即checkid=n,后续步骤checkid带入n计算,当前车车辆完成收尾时,检测号更新赋值:checkid=checkid+1=n+1;
24.(2)标记车辆抓拍完成情况:根据车道号为一车道(laneno=1),查询抓拍完成情况标记(cflag),在无车状态下,cflag默认值为0,即cflag=0,车辆触发来车线圈调用车头抓拍时,cflag递增加一,cflag=cflag+1,车辆离开离车线圈触发车尾抓拍时,cflag递减减一,cflag=cflag-1。
25.(3)标记车辆收尾完成情况:根据车道号为一车道(laneno=1),查询收尾完成情况标记(eflag),在无车状态下,eflag默认值为0,即eflag=0,车辆触发来车线圈调用车头抓拍时,eflag递增加一,eflag=eflag+1,车辆离开离车线圈称重数据收尾时,eflag递减减一,eflag=eflag-1。
26.(4)信息匹配规则:根据车道号为一车道(laneno=1),查询对应车道车辆的
checkid=n;车头抓拍触发时,查询对应车道eflag,计算车头抓拍检测号为checkid=checkid+eflag;车尾抓拍触发时,查询对应车道eflag及cflag,计算cflag
–
eflag的值,判断值若为0,则车尾抓拍图片检测号为checkid,判断值若不为0,则车尾抓拍图片检测号为checkid
–
1;称重数据收尾时,称重数据检测号为checkid;最终,将检测号相同的车头抓拍图片、车尾抓拍图片及称重数据匹配为同一车辆的信息。
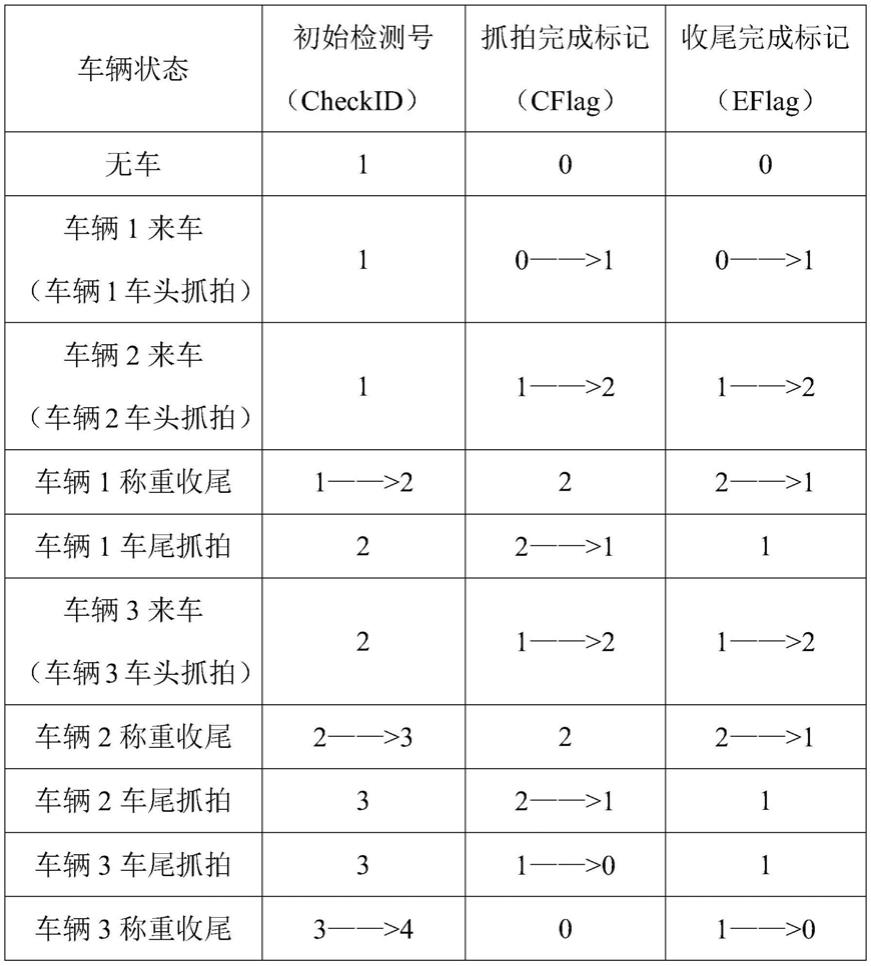
27.以三辆车连续过车其中一种时序为例进行说明:
[0028][0029]
如图3所示,下面根据以上表格计算各车辆检测号情况:
[0030]
车辆1:车头抓拍图片检测号checkid(最终)=checkid+eflag=1+0=1;cflag
–
eflag=2
–
1=1≠0,车尾抓拍图片检测号checkid(最终)=checkid
–
1=2
–
1=1;称重数据检测号checkid(最终)=checkid=1。由此,车辆1车头抓拍图片、车尾抓拍图片及称重数据检测号相等,均等于1,匹配正常。
[0031]
车辆2:车头抓拍图片检测号checkid(最终)=checkid+eflag=1+1=2;cflag
–
eflag=2
–
1=1≠0,车尾抓拍图片检测号checkid(最终)=checkid
–
1=3
–
1=2;称重数据
检测号checkid(最终)=checkid=2。由此,车辆2车头抓拍图片、车尾抓拍图片及称重数据检测号相等,均等于2,匹配正常。
[0032]
车辆3:车头抓拍图片检测号checkid(最终)=checkid+eflag=2+1=3;cflag
–
eflag=1
–
1=0,车尾抓拍图片检测号checkid(最终)=checkid=3;称重数据检测号checkid(最终)=checkid=3。由此,车辆3车头抓拍图片、车尾抓拍图片及称重数据检测号相等,均等于3,匹配正常。
[0033]
时序指的是,同样是前车没有离开离车线圈,但后车已经到达开车线圈的情况下,车辆收尾和车尾抓拍的先后。
[0034]
因为车辆收尾和车尾抓拍是同一个时间点进行,但是程序处理时间有差异,有时候车辆先收尾然后车尾抓拍完毕,有时候是车尾抓拍完毕了车辆才收尾。每一辆车都可能有这种情况,所以有很多种时序,本发明不仅仅适用于本实施例所列举的时序,也同样适用于以上时序,可有效处理连续跟车导致的多源车辆信息匹配异常。
[0035]
虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1