一种主动靶球装置及其控制方法与流程
1.本发明涉及激光检测领域,尤其涉及一种主动靶球装置及其控制方法。
背景技术:
2.激光跟踪测量,可对空间运动目标进行跟踪并实时测量其空间坐标。目前市场上的激光跟踪测量仪,主要由瑞士leica、美国api、美国faro公司提供。集激光干涉测距、光电检测、精密机械、计算机控制、数值计算等功能基于一体。现有激光跟踪测量仪工作时,在被测目标上附加一个移动靶作为测量标,在移动靶移动时,跟踪头在跟踪伺服机构的控制下,实时调整,跟踪移动靶并测量。现有激光跟踪测量仪,采用激光干涉测距。虽然精度很高,但是电子系统非常复杂,而且在结构上还必须增加一个“鸟巢”,才可以获得绝对距离。
3.例如,一种在中国专利文献上公开的“一种激光跟踪测量系统”,其公告号:cn105758370b,公开了一号观测装置、二号观测装置,通过两个并排的观测装置协同测量具体位置。
技术实现要素:
4.为此,本发明提供一种主动靶球装置及其控制方法,能够在不接触靶球的情况下实现测量。
5.为了实现上述目的,本发明提供如下技术方案:一种主动靶球装置,包括:主动靶球,用于自动旋转补光;激光跟踪仪,用于获取标定位置;能够在不接触靶球的情况下进行测量。
6.作为优选的,主动靶球包括:通信模块,用于接收与发送靶球状态信息,包括位置信息、工作信息;处理模块,位于通信模块旁,与通信模块相连,用于处理靶球信息与激光跟踪仪的信息;靶球机构,位于处理模块旁,与处理模块相连,用于接收激光跟踪仪发出的光线。能够实时监控靶球的测量信息。
7.作为优选的,靶球机构包括靶球座,位于靶球座下方与其连接的陀螺仪,位于陀螺仪旁与其连接的旋转器。能够让靶球旋转从而一直与激光跟踪仪相对应。
8.作为优选的,通信模块包括wifi模块。能够实现远程操控,全过程不需任何人为接触靶球操作。
9.作为优选的,处理模块包括开发板。经济好,易于实现。
10.作为优选的,激光跟踪仪包括激光发射器,与激光发射器连接的电子水平仪。
11.一种主动靶球装置控制方法,包括如下步骤;s1、获取目标标定位置;s2、根据移动状态改变标定接收方式;
s3、根据实时更新的标定位置确定实际标定位置。
12.作为优选的,目标标定位置包括靶球相对于激光跟踪仪的三维坐标;靶球移动状态包括靶球座旋转角度,主动靶球装置转向角度。能够自适应跟随测量进行调整。
13.本发明的实施方式具有如下优点:(1)无线操作,无需人工接触靶球即可完成测量;(2)可满足应用的动态测量,具备自动定位和跟踪活动目标的功能;(3)替代性高:主动靶球可以替代人工而到达需要到达的位置(减少人员);测量精准:可以实时测出想要的任何点位的信息。
附图说明
14.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
15.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达到的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
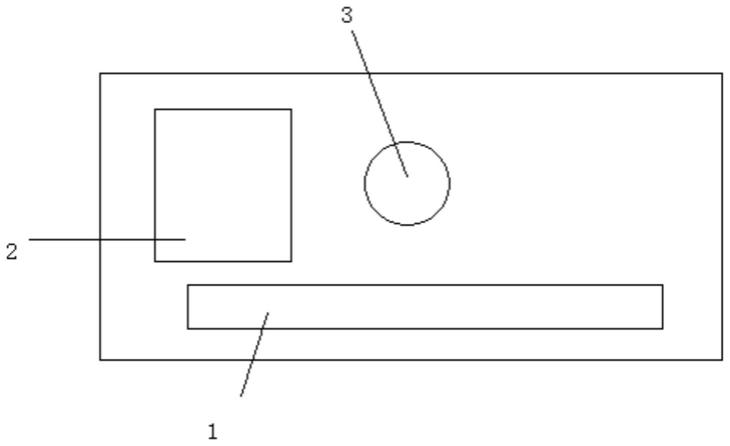
16.图1是本发明的主动靶球结构示意图。
17.图2是本发明的控制方法步骤图。
18.图中:1-处理模块;2-通信模块;3-靶球机构。
具体实施方式
19.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的认识可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.如图1-2所示,在一个较佳的实施例中,本发明公开了一种主动靶球装置及其控制方法。
21.agv小车搭载主动靶球,然后激光跟踪仪跟踪靶球,靶球是由步进电机连接,在agv小车运动时主动靶球自动旋转捕光,从而获得精准的当前靶球数据(距离,角度)信息。
22.主动靶球主要由驱动器,靶球座,电池,开发板,wifi模块等组成。主动靶球的外形尺寸为外形尺寸240*160*66mm(长宽高),该装置采用锂电池供电,续航能力可达3小时;内置wifi模块,可实现20m以内的远程控制。
23.激光跟踪仪主机:(1)有效测量范围:三维测量半径≥80m,在0~0.5m范围内无测量盲区,水平转角范围≥
±
360
°
,垂直转角范围≥130
°
(2)主机测距精度(mpe):≤ 16μm + 0.8μm/m,角度精度(mpe):≤20μm + 5μm/m,空间点测量精度(mpe):≤20μm+5μm/m;
(3)跟踪速度性能:径向速度≥25米/秒,最大径向加速度≥30米/秒
²
;最大角加速度≥860
°
/sec
²
,最大角速度≥180
°
/sec。
24.(4)主机测距分辨率≤0.5μm,角度分辨率≤0.02
°
/sec。
25.(5)内置精密电子水平仪精度≤
±ꢀ
2 弧秒;(6)跟踪仪测量数据输出速率≥1000测量点/秒;(7)带有断光续接功能,全过程不需任何人为接触靶球操作,视场角不低于50
°
;(8)主机通过国际ip52
ꢀ‑
iec防护标准认证,使用过程中防尘、防水;(9)主机与电脑之间可以通过无线wifi连接,支持现场测量。
26.(10)支持动态跟踪测量,数据采集速率≥1000点/秒。
27.(11)安装方式:可斜装,可倒装,设备可自动调平,无需人工调平。
28.(12)工作温度范围:-15℃~50℃。
29.(13)激光等级:一级安全激光。
30.主动靶球:(1)支持和激光跟踪仪配套使用,使跟踪仪具备测量臂功能,能够进行接触式测量,提供 6 自由度(6dof)测量功能,能够测量被测工件的遮蔽点,可满足应用的动态测量,具备自动定位和跟踪活动目标的功能;(2)测距至少可满足2.5m至15m;(4)激光采样频率1点/秒;(5)电池寿命:至少可以满足连续使用(2~3小时);(6)转动角度:360度;(7)支持无线方式,可满足支持手持式操作和固定式操作。
31.一种主动靶球装置控制方法,包括如下步骤:s1、获取目标标定位置;当主动靶球装置相对于激光跟踪仪移动时,主动靶球模块通过无线模式将主动靶球基于激光跟踪仪的三维坐标发送至接收端,接收端接收到主动靶球的三维坐标后记为(x1,y1,z1),接收端重复此步骤后获取下一时刻主动靶球的三维坐标记为(x2,y2,z2),根据前后相邻两时刻的三维坐标计算出主动靶球相对于激光跟踪仪的移动角度;s2、根据移动状态改变标定接收方式;移动状态包括主动靶球对基于激光跟踪仪为原点的三维坐标下移动角度,当移动角度偏离坐标轴时,主动靶球计算出移动角度对应的反向角度,使主动靶球装置旋转反向角度,使主动靶球始终朝向跟踪仪;移动状态包括靶球机构的旋转角度,当主动靶球装置受到限制无法转动时,主动靶球做旋转反向角度,使得靶球机构始终朝向激光跟踪仪;s3、根据实时更新的标定位置确定实际标定位置,激光跟踪器实时接收主动靶球相对于激光跟踪仪的三维坐标;主动靶球移动状态包括靶球座旋转角度,主动靶球装置转向角度。
32.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1