一种轨道减振垫参数检测方法与流程
1.本发明涉及减振垫领域,尤其涉及一种轨道减振垫参数检测方法。
背景技术:
2.现有的减振垫检测方法都是在实验室环境下的检测,本发明通过将压力、位移、加速度、振动等植入式的传感器结构,将列车行驶过程中的各项传感器数值变化进行检测,从而判断轨道减振垫是否达到相应的设定效果,便于对减振垫进行实时监测,并根据监测结果判断是否进行报警。
3.一种在中国专利文献上公开的“改良型轨道减振垫板”,其公告号cn211689686u,包括垫板本体,所述垫板本体为橡胶材质制作,其为具有一定厚度的矩形实体平板结构,所述垫板本体的下表面为平面,上表面设有多个呈阵列状排列的减振凸台,所述减振凸台为截圆锥状结构、圆柱结构或棱条结构,所述减振凸台包含第一减振凸台和第二减振凸台,所述第一减振凸台的高度低于第二减振凸台的高度;由此,本实用新型安装在钢轨与扣件或扣件与轨枕之间,能更好的缓冲车辆通过路轨时所产生的高速振动和冲击,有效保护路基和轨枕,更好的降低噪音,通过多种不同规格尺寸的弹性凸台组合,提供不同刚度的叠加,增加了垫板的刚度,提高减振效果。其不足之处是:无法实现在列车行驶过程中的各项传感器数值变化的检测。
技术实现要素:
4.本发明主要是为了解决无法实现在列车行驶过程中的各项传感器数值变化的检测的问题,提供一种轨道减振垫参数检测方法,可以实现在列车行驶过程中的各项传感器数值变化的检测。
5.为了实现上述目的,本发明采用以下技术方案:一种轨道减振垫参数检测方法,包括以下步骤:s1:在减振垫上设置检测单元,采集关键参数数据;s2:对采集的关键参数数据进行定性分析,得到有效数据;s3:将有效数据进行拟合和二次积分,得到轨道刚度不平顺信息;s4:根据有效数据计算轨道上下偏移量,检测轨道是否符合标准;s5:根据步骤s3和步骤s4的结果,判断减振垫是否达到相应设定效果。
6.步骤s1中通过在减振垫上设置检测单元的形式,通过植入式的传感器结构,将列车行驶过程中的各项传感器数值变化进行检测,从而判断轨道减振垫是否达到相应的设定效果,并根据结果判断是否报警。
7.步骤s2中沟通过对关键参数数据进行定性分析,并通过去噪处理后得到有效数据,所述有效数据包括有效加速度数据。
8.步骤s3中通过对有效加速度数据进行计算分析后,可以得到左右轨道刚度是否平顺的信息,便于检测左右轨道的刚度平顺情况。
9.步骤s4中通过有效加速度数据计算在列车行驶过程中的左右轨道上下偏移量,从而实现对轨道的实时检测,并自动判断轨道是否符合标准,间接地实现对减振垫的监测。
10.步骤s5中通过对轨道上下偏移量和轨道刚度不平顺信息的分析处理,判断减振垫是否达到相应设定效果,从而实现对减振垫的实时监测,并依据监测结果判断是否报警。
11.作为优选,步骤s1中所述检测单元包括加速度检测单元和位移检测单元;步骤s1中所述关键参数数据包括加速度数据和位移数据。
12.所述加速度检测单元用于检测所述加速度数据;所述位移检测单元包括用于检测加速度方向的位移的路程位移传感器。
13.作为优选,步骤s2包括以下步骤:s21:对采集的关键参数数据进行定性分析,筛选需处理的关键参数数据;s22:对筛选的关键参数数据进行滤波处理,滤除低频成分;s23:进行滤波处理后得到有效数据。
14.步骤s21中对采集的关键参数数据进行定性分析,可以通过定性分析公式得到关键参数数据中的有效数据和无用信号,从而筛选出需要进行处理的关键参数数据。
15.步骤s22中通过滤波处理将噪声信号排除,从而得到有效数据,便于提高关键参数数据的可靠性和准确性。
16.作为优选,步骤s21中所述对采集的关键参数数据进行定性分析的公式为:式中,μ是均值,aj是j阶幅值,p是总分量,ω0是基频,是初始相位角,σ(t)是噪声信号。
17.在对轨道状态进行研究时,将对欲采集的关键参数数据进行定性分析。得到的数据包含两大部分:一是采集到的有效数据,二是无用信号(噪声信号)。噪声信号主要来自仪器本身的精度误差和配合其他系统时的装配误差。
18.检测单元输出的信号公式为:y(t)=f(t)+σ(t)其中f(t)为有用信号,σ(t)为噪声信号。
19.对采集到的有效数据进行分析,其有用信号f(t)的公式为:对输出信号公式y(t)=f(t)+σ(t)进行积分变换,得到所述对采集的关键参数数据进行定性分析的公式。
20.对积分后的公式进行分析,有用信号的幅值为当j趋向于无穷小时,幅值趋向于无穷大。噪声信号所在权重较小,可以忽略不计。因此,低频分量对加速度影响较大,需要对采集到的加速度信号进行滤波处理,滤除低频成分。
21.作为优选,步骤s22中所述对筛选的关键参数数据进行滤波处理的公式为:y(ejω)=x(ejω)
×
h(ejω)式中,x(ejω)为激励响应幅角,h(ejω)为单位抽样响应幅角。
22.由于数字滤波器应用广泛,且有限单位冲激响应滤波器可以保证任意幅频特性的同时具有严格的线性相频特性,其单位抽样响应是有限长的。由于加速度信号中夹杂着低频分量,要求低频截止,高频通过的滤波器。高通滤波的时域分析公式为:y(n)=x(n)
×
h(n)其中x(n)为激励相应,h(n)为单位抽样响应。x(n)以一定的步长穿过h(n),其每走一步就会得到一个响应值y(n),利用h(n)窗口加权即可实现高频通过,低频截止。将时域转化为频域分析公式,得到所述对筛选的关键参数数据进行滤波处理的公式。
23.所述对筛选的关键参数数据进行滤波处理的公式中,激励响应幅角和单位抽样响应幅角,对高频响应权重影响较大,低频响应权重影响较小,可以达到滤除低频分量的效果。
24.作为优选,步骤s3包括以下步骤:s31:对有效数据采用最小二乘法进行拟合,对拟合后的数据进行二次积分获得轨道横向刚度不平顺信息;s32:通过轨道横向刚度不平顺信息得到轨道纵向刚度不平顺信息;s33:通过有效数据得到有效数据在xyz轴三个方向上的信息;s34:通过对z轴上的有效数据信息进行拟合和二次积分,得到左右轨道刚度不平顺信息。
25.步骤s31中通过将有效加速度数据进行最小二乘法拟合并二次积分,得到位移数据,所述位移数据即为轨道横向刚度不平顺信息数据。
26.步骤s32中可以对轨道横向刚度不平顺信息通过二次积分得出轨道纵向刚度不平顺信息,即纵向方向的轨道刚度不平顺信息。
27.步骤s33中通过检测单元将加速度数据传递至终端,并分析得到有效加速度数据后,输出所述有效加速度数据在xyz轴三个方向上的信息,便于后续计算左右轨道刚度不平顺信息。
28.作为优选,步骤s4包括以下步骤:s41:通过有效数据计算振动位移数据;s42:判断振动位移数据是否符合标准,若符合标准则跳转步骤s43;若不符合标准,则发出报警信息;s43:通过振动位移数据计算轨道上下偏移量;s44:通过计算得到的轨道上下偏移量检测减振垫是否符合标准。
29.步骤s41中通过有效加速度数据计算所述振动位移数据,该计算方法为现有公式的计算。首先,通过计算或者用加速度传感器测出加速度后乘以加速度方向的位移等方式进行振动强度理论值的计算,然后通过振动强度计算振动幅值(即振动位移数据)。
30.步骤s42中根据减振垫振动标准检测所述振动幅值是否满足需求,便于对减振垫进行实时监测,并根据监测结果判断是否进行报警。
31.步骤s43中通过振动幅值计算轨道上下偏移量,得到轨道上下偏移的数值范围,便
于步骤s44中检测所述轨道是否符合标准,从而间接地实时监测减振垫情况。
32.作为优选,步骤s5包括以下步骤:s51:根据步骤s3得到的所述轨道刚度不平顺信息,判断轨道是否刚度不平顺,若是则发出报警信息;若不是则继续采集关键参数数据;s52:根据步骤s4得到的所述轨道上下偏移量,判断轨道是否符合标准,若是则继续采集关键参数数据;若不是则发出报警信息。
33.通过对步骤s51中的所述轨道刚度不平顺信息和步骤s52中的所述轨道上下偏移量,进行对轨道的实时检测判断,从而判断轨道减振垫是否达到相应的设定效果,便于对减振垫进行实时监测,并根据监测结果判断是否进行报警。
34.作为优选,所述检测单元设置在两侧轨道的减振垫中。
35.通过上述设置方式可以实现对两侧轨道信息的分别采集,使数据采集更为直接和全面。
36.本发明中的所述检测单元均通过无线或者有线的方式连接和传输数据至终端,便于终端进行数据实时分析,从而实时判断轨道减振垫是否达到相应的设定效果。
37.本发明的有益效果是:(1)本发明通过在减振垫上设置检测单元的形式,通过植入式的传感器结构,将列车行驶过程中的各项传感器数值变化进行检测,从而判断轨道减振垫是否达到相应的设定效果,便于对减振垫进行实时监测,并根据监测结果判断是否进行报警。
38.(2)步骤s2可以对采集的关键参数数据进行定性分析,得到关键参数数据中的有效数据和无用信号,从而筛选出需要进行处理的关键参数数据。
39.(3)步骤s2可以通过滤波处理将噪声信号排除,从而得到有效数据,便于提高关键参数数据的可靠性和准确性。
40.(4)步骤s3可以通过最小二乘法拟合和二次积分的方式,得到左右轨道刚度不平顺信息,便于检测减振垫的实时状态。
41.(5)通过检测单元设置在两侧轨道的减振垫中的设置方式,可以实现对两侧轨道信息的分别采集,使数据采集更为直接和全面。
附图说明
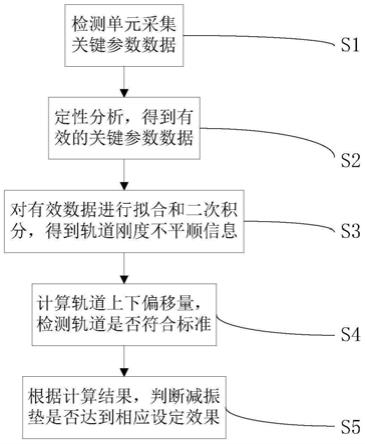
42.图1是本发明的流程示意图。
具体实施方式
43.下面结合附图和具体实施方式对本发明做进一步的描述。
44.如图1所示,一种轨道减振垫参数检测方法,包括以下步骤:s1:在减振垫上设置检测单元,采集关键参数数据;s2:对采集的关键参数数据进行定性分析,得到有效数据;s3:将有效数据进行拟合和二次积分,得到轨道刚度不平顺信息;s4:根据有效数据计算轨道上下偏移量,检测轨道是否符合标准;s5:根据步骤s3和步骤s4的结果,判断减振垫是否达到相应设定效果。
45.步骤s1中通过在减振垫上设置检测单元的形式,通过植入式的传感器结构,将列
车行驶过程中的各项传感器数值变化进行检测,从而判断轨道减振垫是否达到相应的设定效果,并根据结果判断是否报警。
46.步骤s2中沟通过对关键参数数据进行定性分析,并通过去噪处理后得到有效数据,有效数据包括有效加速度数据。
47.步骤s3中通过对有效加速度数据进行计算分析后,可以得到左右轨道刚度是否平顺的信息,便于检测左右轨道的刚度平顺情况。
48.步骤s4中通过有效加速度数据计算在列车行驶过程中的左右轨道上下偏移量,从而实现对轨道的实时检测,并自动判断轨道是否符合标准,间接地实现对减振垫的监测。
49.步骤s5中通过对轨道上下偏移量和轨道刚度不平顺信息的分析处理,判断减振垫是否达到相应设定效果,从而实现对减振垫的实时监测,并依据监测结果判断是否报警。
50.步骤s1中检测单元包括加速度检测单元和位移检测单元;步骤s1中关键参数数据包括加速度数据和位移数据。
51.加速度检测单元用于检测加速度数据;位移检测单元包括用于检测加速度方向的位移的路程位移传感器。
52.步骤s2包括以下步骤:s21:对采集的关键参数数据进行定性分析,筛选需处理的关键参数数据;s22:对筛选的关键参数数据进行滤波处理,滤除低频成分;s23:进行滤波处理后得到有效数据。
53.步骤s21中对采集的关键参数数据进行定性分析,可以通过定性分析公式得到关键参数数据中的有效数据和无用信号,从而筛选出需要进行处理的关键参数数据。
54.步骤s22中通过滤波处理将噪声信号排除,从而得到有效数据,便于提高关键参数数据的可靠性和准确性。
55.步骤s21中对采集的关键参数数据进行定性分析的公式为:式中,μ是均值,aj是j阶幅值,p是总分量,ω0是基频,是初始相位角,σ(t)是噪声信号。
56.在对轨道状态进行研究时,将对欲采集的关键参数数据进行定性分析。得到的数据包含两大部分:一是采集到的有效数据,二是无用信号(噪声信号)。噪声信号主要来自仪器本身的精度误差和配合其他系统时的装配误差。
57.检测单元输出的信号公式为:y(t)=f(t)+σ(t)其中f(t)为有用信号,σ(t)为噪声信号。
58.对采集到的有效数据进行分析,其有用信号f(t)的公式为:对输出信号公式
y(t)=f(t)+σ(t)进行积分变换,得到对采集的关键参数数据进行定性分析的公式。
59.对积分后的公式进行分析,有用信号的幅值为当j趋向于无穷小时,幅值趋向于无穷大。噪声信号所在权重较小,可以忽略不计。因此,低频分量对加速度影响较大,需要对采集到的加速度信号进行滤波处理,滤除低频成分。
60.步骤s22中对筛选的关键参数数据进行滤波处理的公式为:y(ejω)=x(ejω)
×
h(ejω)式中,x(ejω)为激励响应幅角,h(ejω)为单位抽样响应幅角。
61.由于数字滤波器应用广泛,且有限单位冲激响应滤波器可以保证任意幅频特性的同时具有严格的线性相频特性,其单位抽样响应是有限长的。由于加速度信号中夹杂着低频分量,要求低频截止,高频通过的滤波器。高通滤波的时域分析公式为:y(n)=x(n)
×
h(n)其中x(n)为激励相应,h(n)为单位抽样响应。x(n)以一定的步长穿过h(n),其每走一步就会得到一个响应值y(n),利用h(n)窗口加权即可实现高频通过,低频截止。将时域转化为频域分析公式,得到对筛选的关键参数数据进行滤波处理的公式。
62.对筛选的关键参数数据进行滤波处理的公式中,激励响应幅角和单位抽样响应幅角,对高频响应权重影响较大,低频响应权重影响较小,可以达到滤除低频分量的效果。
63.步骤s3包括以下步骤:s31:对有效数据采用最小二乘法进行拟合,对拟合后的数据进行二次积分获得轨道横向刚度不平顺信息;s32:通过轨道横向刚度不平顺信息得到轨道纵向刚度不平顺信息;s33:通过有效数据得到有效数据在xyz轴三个方向上的信息;s34:通过对z轴上的有效数据信息进行拟合和二次积分,得到左右轨道刚度不平顺信息。
64.步骤s31中通过将有效加速度数据进行最小二乘法拟合并二次积分,得到位移数据,位移数据即为轨道横向刚度不平顺信息数据。
65.步骤s32中可以对轨道横向刚度不平顺信息通过二次积分得出轨道纵向刚度不平顺信息,即纵向方向的轨道刚度不平顺信息。
66.步骤s33中通过检测单元将加速度数据传递至终端,并分析得到有效加速度数据后,输出有效加速度数据在xyz轴三个方向上的信息,便于后续计算左右轨道刚度不平顺信息。
67.步骤s4包括以下步骤:s41:通过有效数据计算振动位移数据;s42:判断振动位移数据是否符合标准,若符合标准则跳转步骤s43;若不符合标准,则发出报警信息;s43:通过振动位移数据计算轨道上下偏移量;s44:通过计算得到的轨道上下偏移量检测减振垫是否符合标准。
68.步骤s41中通过有效加速度数据计算振动位移数据,该计算方法为现有公式的计
算。首先,通过计算或者用加速度传感器测出加速度后乘以加速度方向的位移等方式进行振动强度理论值的计算,然后通过振动强度计算振动幅值(即振动位移数据)。
69.步骤s42中根据减振垫振动标准检测振动幅值是否满足需求,便于对减振垫进行实时监测,并根据监测结果判断是否进行报警。
70.步骤s43中通过振动幅值计算轨道上下偏移量,得到轨道上下偏移的数值范围,便于步骤s44中检测轨道是否符合标准,从而间接地实时监测减振垫情况。
71.步骤s5包括以下步骤:s51:根据步骤s3得到的轨道刚度不平顺信息,判断轨道是否刚度不平顺,若是则发出报警信息;若不是则继续采集关键参数数据;s52:根据步骤s4得到的轨道上下偏移量,判断轨道是否符合标准,若是则继续采集关键参数数据;若不是则发出报警信息。
72.通过对步骤s51中的轨道刚度不平顺信息和步骤s52中的轨道上下偏移量,进行对轨道的实时检测判断,从而判断轨道减振垫是否达到相应的设定效果,便于对减振垫进行实时监测,并根据监测结果判断是否进行报警。
73.检测单元设置在两侧轨道的减振垫中。
74.通过上述设置方式可以实现对两侧轨道信息的分别采集,使数据采集更为直接和全面。
75.本发明中的检测单元均通过无线或者有线的方式连接和传输数据至终端,便于终端进行数据实时分析,从而实时判断轨道减振垫是否达到相应的设定效果。
76.应理解,该实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1