一种利用卫星遥感反射率估算水库营养状态指数的方法与流程
1.本发明属于水库饮用水源地水环境评价技术领域,具体涉及一种利用卫星 遥感反射率估算水库营养状态指数的方法。
背景技术:
2.水库是我国重要的饮用水源地,具有提供居民生产生活用水、水利发电运 输和调节气候等功能,在我国社会经济发展和生态环境建设中发挥着举足轻重 的作用。随着社会经济的发展,工业点源污染、农业面源污染、工农业技术的 进步和人类活动生活的影响,污染水库的因素日益增多。其中水库富营养化问 题是当前最严重的环境问题,对社会经济可持续发展有重要的影响。
3.对于重要饮用水源地水库的持续监测可以实时确保水源地的水质安全,为 保护地方城市人类生活和社会经济的可持续发展提供坚实的后盾,因此对于国 家的战略发展和生产生活都具有十分重要的现实意义。目前湖库的营养化程度 评价方法主要有卡尔森营养状态指数法(tsi)、修正的营养状态指数法(tsim)、 综合营养状态指数法(tii)、营养度指数法和评分法等,这些方法均需要实地采 样测试大量水质参数,如叶绿素、化学需氧量、总氮、总磷、透明度等,操作 过程十分繁琐,同时对测量和分析的专业素质要求较高,从而局限了对水库营 养状态进行全方位持续的时空监测。
4.论文《基于遥感监测的湖泊富营养化状态的模糊模式识别研究》(任春涛; 内蒙古农业大学;2007年)公开了一种利用landsat5 tm遥感数据反演湖泊水 体水质组分的方法和技术,研究结果显示,landsat5 tm遥感数据的1-4波段对 湖泊水体水质参数反应比较灵敏,且与单波段相比,波段组合值算法与湖泊水 体水质参数的相关性有明显提高,利用径向基(rbf)神经网络
5.方法构建了适合湖泊水体水质浓度遥感反演模型,水质浓度遥感反演平均 误差在
±
25%。但是,由于内陆湖泊水库物质组分复杂,在同一区域的不同湖库 光学特性和水体遥感反射率都会具有一定的差异性,上述方法以单个湖泊作为 研究对象,模型不具有普适性,同时其模型的平均误差过大;湖库水体的复杂 性以及卫星传感器的差异性决定了水质浓度遥感反演模型的构建差异性。其次, 其利用的landsat 5tm遥感数据在光谱分辨率和空间分辨率上远不如sentinel-2 双星传感器,对于我国以中小型水库为主的国情考虑出发,更适合用sentinel-2 双星传感器构建模型,其模型构建的普适性和精度是目前内陆湖泊水库水质浓 度遥感反演模型构建的关注重点。另外,虽然湖泊和水库具有相似之处,但水 库作为人工湖泊,受人类活动影响较大,水质参数变化较大,湖泊和水库的水 质浓度遥感反演模型在定量参数上也具有一定的差异性。目前,针对水库等饮 用水源地的大尺度营养状态指数精确估算模型还未见报道,这也是目前为应对 饮用水源地治理保护所亟需解决的重要环境监测难点。
技术实现要素:
6.为了解决现有水库的营养化程度评价方法操作繁琐,同时以landsat5 tm等 遥感影像反射率数据对单一内陆湖库营养化状态反演估算的方法存在的普适性 差、误差大的问题,本发明提供一种利用卫星遥感反射率估算水库营养状态指 数的方法。
7.本发明为解决技术问题所采用的技术方案如下:
8.本发明的一种利用卫星遥感反射率估算水库营养状态指数的方法,主要包 括以下步骤:
9.步骤一、水库实地采样和卡尔森营养指数tsim计算;
10.步骤二、实测野外高光谱反射率r
rs
的获取与处理以及水库实测的修正卡尔 森营养指数点的计算;
11.步骤三、星地同步匹配的卫星遥感反射率获取;
12.步骤四、实测卡尔森营养指数tsim与野外高光谱反射率建模估算的tsi的 精度分析;
13.步骤五、按照标准评价各采样点水库的富营养化程度。
14.进一步的,步骤一中,所述水库实地采样的具体过程如下:
15.在全国范围内采集多个水库多个采样点,水样采集于湖库中央水面0.1m以 下的位置,每个水样采集量均为2l,同时记录各采样点的gps位置,并实地使 用塞氏盘测量水样水体的透明度sdd,将水样保存于4℃的冰箱内冷藏。
16.进一步的,步骤一中,所述卡尔森营养指数tsim计算的具体过程如下:
17.(1)待测水样的叶绿素a浓度计算
18.将待测水样利用47μm的玻璃纤维微孔滤膜进行过滤,玻璃纤维微孔滤膜通 过90%的丙酮溶液浸泡24小时后,经离心机进行分离提取上层清液,在紫外
‑ꢀ
可见光分光光度计上分别测试获得叶绿素a在波长630nm、647nm、664nm和 750nm处的吸光度,叶绿素a浓度的计算公式如下:
[0019][0020]
式中,d
630
表示有色可溶有机物在630nm处的光学密度,d
647
表示有色可 溶有机物在647nm处的光学密度,d
664
表示有色可溶有机物在664nm处的光学 密度,d
750
表示有色可溶有机物在750nm处的光学密度,v表示用以萃取叶绿 素所用溶液的体积,单位ml,l表示光程,单位cm,v表示过滤水样的体积, 单位l;
[0021]
(2)待测水样的总磷tp浓度计算
[0022]
总磷tp浓度的标准分析方法为过硫酸钾消解钼酸铵分光光度法,利用过硫 酸钾或硝酸-高氯酸为氧化剂,将待测水样消解后用钼蓝分光光度法测量总磷 tptp浓度;
[0023]
(3)卡尔森营养指数tsim计算
[0024]
利用叶绿素a浓度、透明度sdd和总磷tp浓度计算和修正卡尔森营养指 数tsim,用以表征待测水样水体的营养状态指数;卡尔森营养指数tsim的计算 公式如下:
[0025][0026]
[0027][0028]
tsim=0.54
×
tsim(chla)+0.297
×
tsim(sdd)+0.163
×
tsim(tp)
ꢀꢀꢀ
(5)。
[0029]
进一步的,步骤二中,所述实测野外高光谱反射率r
rs
的获取与处理的的具 体过程如下:
[0030]
打开asd fieldspec4 hi-res便携式光谱仪进行开机预热,然后依次进行dc 暗电流测量、离水辐亮度测量、水体总辐亮度测量、天空漫散射辐亮度测量、 水面总入射辐照度测量和标准灰板的辐亮度测量;测量完毕后导出并利用 viewspecpro软件去除异常值,对剩余的光谱数据进行平均值计算;利用水体遥 感反射率的计算公式得到最终的实测野外高光谱反射率r
rs
;实测野外高光谱反 射率r
rs
的计算公式如下:
[0031]
lw=l
sw-rl
sky
ꢀꢀꢀ
(6)
[0032]
ed(0
+
)=l
p
×
π/ρ
p
ꢀꢀꢀ
(7)
[0033][0034]
式中,lw表示离水辐亮度,l
sw
表示水体总辐亮度,r表示气-水界面对天空 光的反射率,l
sky
表示天空漫散射辐亮度,ed(0
+
)表示水面总入射辐照度,l
p
表 示标准灰板的辐亮度,ρ
p
表示标准灰板的反射率,r
rs
表示实测野外高光谱反射 率。
[0035]
进一步的,步骤二中,在天气晴朗无云、水面平静的情况下,在上午10 点至下午2点时间段内测量与实测水体水质参数相匹配的野外高光谱数据,利 用asd fieldspec4 hi-res便携式光谱仪测量水体遥感反射率,测量的波段范围 为350~1050nm,光谱的分辨率为3nm;测量时光谱仪的观测平面与太阳入射 角平面需保持夹角135
°
,并且光谱仪的观测平面与水体水面法线需保持夹角45
°
; 测量顺序为离水辐亮度测量、水体总辐亮度测量、天空漫散射辐亮度测量、水 面总入射辐照度测量和标准灰板的辐亮度测量,每项至少采集10条光谱信息。
[0036]
进一步的,步骤二中,所述水库实测的修正卡尔森营养指数点的计算的具 体过程如下:
[0037]
按sentinel-2波段响应函数的b1~b8的波段范围,将实测野外高光谱反射 率合成b1~b8八个波段的遥感反射率;利用matlab软件计算不同波段或不同 波段比与实测卡尔森营养指数tsim的皮尔森相关性,最终发现波段比值为 b5/b3与卡尔森营养指数tsim的相关性最佳,由此建立模型,并按最终模型 tsim=37.51*b5/b3+27.33计算水库实测的修正卡尔森营养指数点。
[0038]
进一步的,步骤三的具体过程如下:
[0039]
(1)下载哨兵二号sentinel-2遥感影像产品中水库所在区域的数据产品 level 1c;所述哨兵二号sentinel-2遥感影像产品为水库水样采集和野外高光谱 数据观测采集的日期前3天和后3天内过境的哨兵二号sentinel-2遥感影像产品;
[0040]
(2)利用sen2cor-2.4.0-win64软件将数据产品level 1c进行辐射定标和大 气校正,得到产品level 2a的大气底层反射率数据;
[0041]
(3)利用envi 5.3软件将产品level 2a的每个波段的图像转换为envi 的标准格式,然后再对b3波段和b5波段进行图层叠加,生成具有投影坐标的 b3和b5波段遥感图像,
提取大气底层反射率;
[0042]
(4)按最终模型tsim=37.51*b5/b3+27.33计算水库的修正卡尔森营养指数 tsim。
[0043]
进一步的,步骤(1)中,所述数据产品level 1c直接由官网 https://scihub.copernicus.eu/dhus/#/home免费下载获取,它是通过正射校正和亚像 元级几何精校正处理后获得的大气顶部反射率产品。
[0044]
进一步的,步骤四的具体过程如下:
[0045]
将步骤(3)的最终模型tsim=37.51*b5/b3+27.33绘制在以b5/b3为横作 标、以tsim为纵坐标的平面直角坐标系中,再将步骤(2)所得的水库实测的 修正卡尔森营养指数点标记在平面直角坐标系中,进行线性拟合,获得步骤(2) 所得的水库实测的修正卡尔森营养指数点与最终模型tsim=37.51*b5/b3+27.33 的相关性分析的决定系数r2。
[0046]
进一步的,步骤五中,按照标准评价各采样点水库的富营养化程度,评价 标准如下:
[0047]
tsim《30为贫营养状态;30≤tsim≤50为中营养状态;tsim》50为富营 养状态;50《tsim《60为轻度富营养状态;60《tsim≤70为中度富营养状态; tsim》70为重度富营养状态;在同一营养状态下,指数值越高,其营养程度 越重。
[0048]
本发明的有益效果是:
[0049]
遥感技术在长时间序列和大尺度空间范围内对水体的光学性质时空变化的 监测,是传统的现场调查不可比拟的。由于水库属于人工湖泊,成分复杂、有 机物来源广泛,在不同营养状态条件下水库水面遥感反射率和固有光学物质会 呈现不同的光学特性,这些都与水库的营养状态指数息息相关,这为实现遥感 反射率监测水库营养状态指数提供了理论依据。基于此,本发明中,实测采样 数据的水质参数和光学特性参数分析全部为水库饮用水源地,模型的参数构建 和验证也全部来源于饮用水源水库,对于水库具有普适性和实用性,采用哨兵 二号(sentinel-2)遥感影像数据,直接获得水库的营养状态指数。sentinel-2 双星传感器是携带推扫式多光谱成像仪(msi)的高分辨率多光谱成像卫星,主 要用于监测陆地上植被、土壤、内陆水体、海岸和紧急救援服务。sentinel-2a 和2b的重访周期为单星10天,双星5天。sentinel-2遥感影像拥有13个波段, 光谱覆盖可见光到短波红外波段范围,空间分辨率为10-60m,空间分辨率和幅 宽较高,其遥感反射率产品更适合我国以中小型水库为主的基本国情,具有普 适性和较高的精确度。
[0050]
本发明与现有技术相比具有以下优点:
[0051]
1、本发明提供的方法是基于实测野外高光谱反射率直接构建水库tsim指数估算模型,同时基于同步卫星影像遥感反射率进行了大气校正和模型精 度验证,计算结果准确。
[0052]
2、本发明省去现有技术中多次构建估算反演叶绿素浓度、总磷浓度以及 透明度的过程,以及再通过营养状态指数计算公式获得水库营养状态的繁琐 评价过程,本发明降低了多次反演估算水质参数造成的精度误差,直接得到 水库的营养状态指数。本发明中,其采样点均匀分布在全国地区范围内,科 学严谨地论证了该方法的可靠性和可操作性,具有直接推广使用的普适性。
[0053]
3、本发明提供的方法使用了卫星遥感产品进行长时间持续的水库营养状 态tsim监测方法,操作简便,能节省大量的人力、物力和财力,可弥补现有 技术无法连续、实时监
测的缺点。
[0054]
4、本发明所采用的sentinel-2卫星遥感影像具有高空间分辨率和光谱分 辨率,可以实现对大、中、小型水库的营养状态监测,且数据可以免费获取。
附图说明
[0055]
图1为水库水样采集分布结果。
[0056]
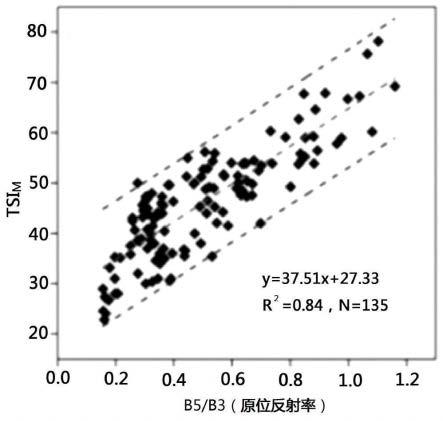
图2为营养状态指数的波段比建模结果。
[0057]
图3为波段比大气校正验证结果。
具体实施方式
[0058]
以下结合附图和具体实施例对本发明的方法进行进一步详细说明。
[0059]
具体实施方式一
[0060]
本实施方式的一种利用卫星遥感反射率估算水库营养状态指数的方法,具 体包括以下步骤:
[0061]
(1)水库实地采样和卡尔森营养指数tsim计算
[0062]
1)水库实地采样
[0063]
在全国范围内采集93个水库135个采样点,水库水样采集分布如图1所示 (其中验证点即为水库位置)。水样采集于湖库中央水面0.1m以下的位置,每 个水样采集量均为2l,同时记录各采样点的gps位置,并实地使用塞氏盘测量 水样水体的透明度(sdd),将水样保存于4℃的冰箱内冷藏,并尽快运回实验 室。
[0064]
2)卡尔森营养指数tsim计算
[0065]
在实验室用国家标准方法测量待测水样的叶绿素a(chla)和总磷(tp)。 具体操作过程如下:
[0066]
2-1)待测水样的叶绿素a(chla)浓度计算
[0067]
将待测水样利用47μm的玻璃纤维微孔滤膜进行过滤,玻璃纤维微孔滤膜通 过90%的丙酮溶液浸泡24小时后,经过离心机进行分离提取上层清液,在紫外
ꢀ‑
可见光分光光度计上分别测试获得叶绿素a在波长630nm、647nm、664nm和 750nm处的吸光度,叶绿素a(chla)浓度的计算公式如下所示。
[0068][0069]
式中,d
λ
表示有色可溶有机物(cdom)在λnm处的光学密度(d
630
表示 有色可溶有机物(cdom)在630nm处的光学密度,d
647
表示有色可溶有机物 (cdom)在647nm处的光学密度,d
664
表示有色可溶有机物(cdom)在664nm 处的光学密度,d
750
表示有色可溶有机物(cdom)在750nm处的光学密度), v表示用以萃取叶绿素所用溶液的体积(ml),l表示光程(cm),v表示过滤水 样的体积(l)。
[0070]
2-2)待测水样的总磷(tp)浓度计算
[0071]
总磷(tp)浓度的标准分析方法为过硫酸钾消解钼酸铵分光光度法 (gb11893-89),利用过硫酸钾或硝酸-高氯酸为氧化剂,将待测水样消解后用 钼蓝分光光度法测量总磷(tp)浓度。
[0072]
2-3)卡尔森营养指数(tsim)计算
[0073]
基于叶绿素a(chla)浓度(μg/l)、透明度(sdd)(m)和总磷(tp)浓 度(μg/l)来计算和修正卡尔森营养指数tsim,用以表征待测水样水体的营养 状态指数;其中,卡尔森营养指数tsim的计算公式如下所示。
[0074][0075][0076][0077]
tsim=0.54
×
tsim(chla)+0.297
×
tsim(sdd)+0.163
×
tsim(tp) (5)
[0078]
(2)实测野外高光谱反射率r
rs
的获取与处理以及水库实测的修正卡尔森 营养指数点的计算
[0079]
1)实测野外高光谱反射率r
rs
的获取与处理
[0080]
在天气晴朗无云、水面平静的情况下,在上午10点至下午2点时间段内测 量与实测水体水质参数相匹配的野外高光谱数据,利用美国analytical spectraldevices公司生产的asd fieldspec4 hi-res便携式光谱仪测量水体遥感反射率, 测量的波段范围为350~1050nm,光谱的分辨率为3nm;测量时为了避免水体 水面反射和阴影的干扰,光谱仪的观测平面与太阳入射角平面需保持夹角135
°
, 并且光谱仪的观测平面与水体水面法线需保持夹角45
°
;测量顺序为离水辐亮度 测量、水体总辐亮度测量、天空漫散射辐亮度测量、水面总入射辐照度测量和 标准灰板的辐亮度测量,每项至少采集10条光谱信息。
[0081]
具体测量步骤如下:
[0082]
首先打开asd fieldspec4 hi-res便携式光谱仪进行开机预热,然后依次进 行dc暗电流测量、离水辐亮度测量、水体总辐亮度测量、天空漫散射辐亮度测 量、水面总入射辐照度测量和标准灰板的辐亮度测量;测量完毕后导出并利用 viewspecpro软件去除异常值,然后对剩余的光谱数据进行平均值计算;利用水 体遥感反射率的计算公式得到最终的实测野外高光谱反射率r
rs
。实测野外高光 谱反射率r
rs
的计算公式如下所示。
[0083]
lw=l
sw-rl
sky
ꢀꢀꢀ
(6)
[0084]
ed(0
+
)=l
p
×
π/ρ
p
ꢀꢀꢀ
(7)
[0085][0086]
式中,lw表示离水辐亮度,l
sw
表示水体总辐亮度,r表示气-水界面对天空 光的反射率,l
sky
表示天空漫散射辐亮度,ed(0
+
)表示水面总入射辐照度,l
p
表 示标准灰板的辐亮度,ρ
p
表示标准灰板的反射率,r
rs
表示实测野外高光谱反射 率。
[0087]
2)水库实测的修正卡尔森营养指数点的计算
[0088]
按照sentinel-2波段响应函数的b1~b8的波段范围,将实测野外高光谱反 射率合成b1~b8八个波段的遥感反射率;利用matlab软件计算不同波段或不 同波段比与实测卡尔森营养指数(tsim)的皮尔森相关性,最终发现波段比值 为b5/b3与卡尔森营养指数(tsim)的相关性最佳,由此建立模型,并按照最 终模型tsim=37.51*b5/b3+27.33计算水库实测的修正卡尔森营养指数点。
[0089]
(3)星地同步匹配的卫星遥感反射率获取
[0090]
1)下载哨兵二号(sentinel-2)遥感影像产品中水库所在区域的数据产品 level 1c,该数据产品level 1c可直接由官网 https://scihub.copernicus.eu/dhus/#/home免费下载获取,它是通过正射校正和亚像 元级几何精校正处理后获得的大气顶部反射率产品(toa,top-of-atmosphere)。
[0091]
其中,所说的哨兵二号(sentinel-2)遥感影像产品为水库水样采集和野外 高光谱数据观测采集的日期前3天和后3天内过境的哨兵二号(sentinel-2)遥 感影像产品。
[0092]
2)利用sen2cor-2.4.0-win64软件将数据产品level 1c进行辐射定标和大气 校正,得到产品level 2a的大气底层反射率数据(boa,bottom-of-atmospherecorrected reflectance)。
[0093]
3)利用envi 5.3软件将产品level 2a的每个波段的图像转换为envi的 标准格式,然后再对b3波段和b5波段进行图层叠加,生成具有投影坐标的b3 和b5波段遥感图像,提取大气底层反射率。
[0094]
4)按照最终模型tsim=37.51*b5/b3+27.33计算水库的修正卡尔森营养指数 (tsim)。
[0095]
(4)实测卡尔森营养指数(tsim)与野外高光谱反射率建模估算的tsi 的精度分析
[0096]
将步骤(3)的最终模型tsim=37.51*b5/b3+27.33绘制在以b5/b3为横作 标、以tsim为纵坐标的平面直角坐标系中,为一条直线(y=37.51x+27.33),再 将步骤(2)所得的水库实测的修正卡尔森营养指数点也标记在平面直角坐标系 中,进行线性拟合,得到图2,从图2可以看出,步骤(2)所得的水库实测的 修正卡尔森营养指数点与最终模型tsim=37.51*b5/b3+27.33的相关性分析的决 定系数r2为0.84,p《0.01;得到的该拟合模型中的数据点在回归线两侧均匀 分布。
[0097]
由于在全国范围内采集93个水库135个采样点,采样点分布广泛且均匀, 依据本发明的方法所计算出来的实测卡尔森营养指数具有极高的可信度。
[0098]
(5)按照标准评价各采样点水库的富营养化程度
[0099]
评价标准如下:
[0100]
tsim《30为贫营养状态;30≤tsim≤50为中营养状态;tsim》50为富营 养状态;50《tsim《60为轻度富营养状态;60《tsim≤70为中度富营养状态; tsim》70为重度富营养状态;在同一营养状态下,指数值越高,其营养程度 越重。
[0101]
具体实施方式二
[0102]
本实施方式的一种利用卫星遥感反射率估算水库营养状态指数的方法,具 体包括以下步骤:
[0103]
(1)水库实地采样和卡尔森营养指数tsim计算
[0104]
1)水库实地采样
[0105]
在全国范围内采集93个水库100个采样点,水库水样采集分布如图1所示。 水样采集于湖库中央水面0.1m以下的位置,每个水样采集量均为2l,同时记录 各采样点的gps位置,并实地使用塞氏盘测量水样水体的透明度(sdd),将水 样保存于4℃的冰箱内冷藏,并尽快运回实验室。
[0106]
2)卡尔森营养指数tsim计算
[0107]
在实验室用国家标准方法测量待测水样的叶绿素a(chla)和总磷(tp)。 具体操作过程如下:
[0108]
2-1)待测水样的叶绿素a(chla)浓度计算
[0109]
将待测水样利用47μm的玻璃纤维微孔滤膜进行过滤,玻璃纤维微孔滤膜通 过90%的丙酮溶液浸泡24小时后,经过离心机进行分离提取上层清液,在紫外
ꢀ‑
可见光分光光度计上分别测试获得叶绿素a在波长630nm、647nm、664nm和 750nm处的吸光度,叶绿素a(chla)浓度的计算公式如下所示。
[0110][0111]
式中,d
λ
表示有色可溶有机物(cdom)在λnm处的光学密度(d
630
表示 有色可溶有机物(cdom)在630nm处的光学密度,d
647
表示有色可溶有机物 (cdom)在647nm处的光学密度,d
664
表示有色可溶有机物(cdom)在664nm 处的光学密度,d
750
表示有色可溶有机物(cdom)在750nm处的光学密度), v表示用以萃取叶绿素所用溶液的体积(ml),l表示光程(cm),v表示过滤水 样的体积(l)。
[0112]
2-2)待测水样的总磷(tp)浓度计算
[0113]
总磷(tp)浓度的标准分析方法为过硫酸钾消解钼酸铵分光光度法 (gb11893-89),利用过硫酸钾或硝酸-高氯酸为氧化剂,将待测水样消解后用 钼蓝分光光度法测量总磷(tp)浓度。
[0114]
2-3)卡尔森营养指数(tsim)计算
[0115]
基于叶绿素a(chla)浓度(μg/l)、透明度(sdd)(m)和总磷(tp)浓 度(μg/l)来计算和修正卡尔森营养指数tsim,用以表征待测水样水体的营养 状态指数;其中,卡尔森营养指数tsim的计算公式如下所示。
[0116][0117][0118][0119]
tsim=0.54
×
tsim(chla)+0.297
×
tsim(sdd)+0.163
×
tsim(tp)
ꢀꢀꢀ
(5)
[0120]
(2)实测野外高光谱反射率r
rs
的获取与处理以及水库实测的修正卡尔森 营养指数点的计算
[0121]
1)实测野外高光谱反射率r
rs
的获取与处理
[0122]
在天气晴朗无云、水面平静的情况下,在上午10点至下午2点时间段内测 量与实测水体水质参数相匹配的野外高光谱数据,利用美国analytical spectraldevices公司生产的asd fieldspec4 hi-res便携式光谱仪测量水体遥感反射率, 测量的波段范围为350~1050nm,光谱的分辨率为3nm;测量时为了避免水体 水面反射和阴影的干扰,光谱仪的观测平面与太阳入射角平面需保持夹角135
°
, 并且光谱仪的观测平面与水体水面法线需保持夹角45
°
;测量顺序为离水辐亮度 测量、水体总辐亮度测量、天空漫散射辐亮度测量、水面总入射辐照度测量和 标准灰板的辐亮度测量,每项至少采集10条光谱信息。
[0123]
具体测量步骤如下:
[0124]
首先打开asd fieldspec4 hi-res便携式光谱仪进行开机预热,然后依次进 行dc暗电流测量,离水辐亮度测量、水体总辐亮度测量、天空漫散射辐亮度测 量、水面总入射辐照度测量和标准灰板的辐亮度测量;测量完毕后导出并利用 viewspecpro软件去除异常值,然后对剩余的光谱数据进行平均值计算;利用水 体遥感反射率的计算公式得到最终的实测野外高光谱反射率r
rs
。实测野外高光 谱反射率r
rs
的计算公式如下所示。
[0125]
lw=l
sw-rl
sky
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0126]
ed(0
+
)=l
p
×
π/ρ
p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0127][0128]
式中,lw表示离水辐亮度,l
sw
表示水体总辐亮度,r表示气-水界面对天空 光的反射率,l
sky
表示天空漫散射辐亮度,ed(0
+
)表示水面总入射辐照度,l
p
表 示标准灰板的辐亮度,ρ
p
表示标准灰板的反射率,r
rs
表示实测野外高光谱反射 率。
[0129]
2)水库实测的修正卡尔森营养指数点的计算
[0130]
按照sentinel-2波段响应函数的b1~b8的波段范围,将实测野外高光谱反 射率合成b1~b8八个波段的遥感反射率;利用matlab软件计算不同波段或不 同波段比与实测卡尔森营养指数(tsim)的皮尔森相关性,最终发现波段比值 为b5/b3与卡尔森营养指数(tsim)的相关性最佳,由此建立模型,并按照最 终模型tsim=37.51*b5/b3+27.33计算水库实测的修正卡尔森营养指数点。
[0131]
(3)星地同步匹配的卫星遥感反射率获取
[0132]
1)下载哨兵二号(sentinel-2)遥感影像产品中水库所在区域的数据产品level 1c,该数据产品level 1c可直接由官网 https://scihub.copernicus.eu/dhus/#/home免费下载获取,它是通过正射校正和亚像 元级几何精校正处理后获得的大气顶部反射率产品(toa,top-of-atmosphere)。
[0133]
其中,所说的哨兵二号(sentinel-2)遥感影像产品为水库水样采集和野外 高光谱数据观测采集的日期前3天和后3天内过境的哨兵二号(sentinel-2)遥 感影像产品。
[0134]
2)利用sen2cor-2.4.0-win64软件将数据产品level 1c进行辐射定标和大气 校正,得到产品level 2a的大气底层反射率数据(boa,bottom-of-atmospherecorrectedreflectance)。
[0135]
3)利用envi 5.3软件将产品level 2a的每个波段的图像转换为envi的 标准格式,然后再对b3波段和b5波段进行图层叠加,生成具有投影坐标的b3 和b5波段遥感图像,提取大气底层反射率。
[0136]
4)按照最终模型tsim=37.51*b5/b3+27.33计算水库的修正卡尔森营养指数 (tsim)。
[0137]
(4)实测卡尔森营养指数(tsim)与野外高光谱反射率建模估算的tsi 的精度分析
[0138]
将步骤(3)的最终模型tsim=37.51*b5/b3+27.33绘制在以b5/b3为横作 标、以tsim为纵坐标的平面直角坐标系中(图2),再将步骤(2)所得的水库 实测的修正卡尔森营养指数点也标记在平面直角坐标系中,进行线性拟合,得 到图3(y=0.96x+0.23),从图3可以看出,步骤(2)所得的水库实测的修正卡 尔森营养指数点与最终模型tsim=37.51*b5/b3+27.33的反演结果值分析中,精 度验证的决定系数为r2为0.80,均方根误差为3.77;得
到的该拟合模型中的 数据点在回归线两侧均匀分布。
[0139]
由于在全国范围内采集93个水库100个采样点,采样点分布广泛且均匀, 依据本发明的方法所计算出来的实测卡尔森营养指数具有极高的可信度。
[0140]
(5)按照标准评价各采样点水库的富营养化程度
[0141]
评价标准如下:
[0142]
tsim《30为贫营养状态;30≤tsim≤50为中营养状态;tsim》50为富营 养状态;50《tsim《60为轻度富营养状态;60《tsim≤70为中度富营养状态; tsim》70为重度富营养状态;在同一营养状态下,指数值越高,其营养程度 越重。
[0143]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通 技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰, 这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1