物料的密度测量方法及其装置与流程
1.本技术涉及图像识别领域,尤其涉及一种物料的密度测量方法及其装置。
背景技术:
2.在对物料进行运输时,通常需要获得物料的密度,相关技术中,常见的测量物料密度的方法是取一定量的物料放在特定容器中,测量其体积和重量,经过多次测量计算获得其物料密度,但这种方法常常费时费力且存在较高的时间滞后性。
技术实现要素:
3.本技术旨在至少在一定程度上解决相关技术中的技术问题之一。
4.为此,本技术的一个目的在于提出一种物料的密度测量方法,通过获取待测物料的三维点云信息;获取所述待测物料的传输速度,并根据所述传输速度和所述三维点云信息,获取所述待测物料在预设时间段内的总体积;获取所述待测物料的实时重量,并根据所述传输速度和所述实时重量,获取所述待测物料在预设时间段内的总重量;基于所述总重量和所述总体积,获取所述待测物料的密度值。
5.本技术在物料运输的过程中就能实时实现在线测量物料的密度,更智能化,可缩短测量时间,简化测量流程,提高测量准确率。
6.本技术的第二个目的在于提出一种物料的密度测量装置。
7.本技术的第三个目的在于提出一种电子设备。
8.本技术的第四个目的在于提出一种非瞬时计算机可读存储介质。
9.本技术的第五个目的在于提出一种计算机程序产品。
10.为达上述目的,本技术第一方面实施例提出了一种物料的密度测量方法,包括:获取待测物料的三维点云信息;获取所述待测物料的传输速度,并根据所述传输速度和所述三维点云信息,获取所述待测物料在预设时间段内的总体积;获取所述待测物料的实时重量,并根据所述传输速度和所述实时重量,获取所述待测物料在预设时间段内的总重量;基于所述总重量和所述总体积,获取所述待测物料的密度值。
11.本技术在物料运输的过程中就能实时实现在线测量物料的密度,更智能化,可缩短测量时间,简化测量流程,提高测量准确率。
12.根据本技术的一个实施例,所述根据所述传输速度和所述三维点云信息,获取所述待测物料在预设时间段内的总体积,包括:基于所述三维点云信息,获取所述待测物料任一截面的截面面积;将所述截面面积与所述传输速度相乘,获取所述待测物料的瞬时体积;对所述瞬时体积在所述预设时间段内进行积分,获取所述待测物料的所述总体积。
13.根据本技术的一个实施例,所述基于所述三维点云信息,获取所述待测物料任一截面的截面面积,包括:基于所述三维点云信息,获取所述待测物料在任一截面的起点坐标、终点坐标和所述任一截面上各点的高度值;基于所述起点坐标和所述终点坐标,对所述高度值进行积分,获取所述待测物料任一截面的截面面积。
14.根据本技术的一个实施例,所述获取所述待测物料的实时重量,并结合所述待测物料的传输速度,获取所述待测物料在预设时间段内的总重量,包括:获取所述待测物料的实时重量;将所述实时重量与所述传输速度相乘,获取所述待测物料的瞬时重量;对所述瞬时重量在所述预设时间段内进行积分,获取所述待测物料的所述总重量。
15.根据本技术的一个实施例,所述物料的密度测量方法还包括:控制栅格照明光源对所述待测物料进行照明,其中,所述栅格照明光源用于在所述待测物料表面形成明暗条纹带。
16.根据本技术的一个实施例,所述获取待测物料的三维点云信息,包括:获取双目相机采集的初始图像,并根据两个相机的所述初始图像,获取所述待测物料的视差图;基于所述视差图和相机内参和相机外参,获取所述待测物料的三维点云信息。
17.根据本技术的一个实施例,所述根据两个相机的所述初始图像,获取所述待测物料的视差图,包括:提取两个所述初始图像中每行格栅的边缘坐标;基于两个所述初始图像中每行格栅的所述边缘坐标,获取所述待测物料的所述视差图。
18.根据本技术的一个实施例,所述提取两个所述初始图像中每行格栅的边缘坐标,包括:获取所述初始图像对应的灰度图,并对所述灰度图进行中值滤波和边缘增强,获取所述灰度图中值滤波和边缘增强后的第一图像;对所述第一图像提取光栅边缘,并进行图像二值化,获取图像二值化后的第二图像;对所述第二图像消除孤立点,并进行边缘细化,获取边缘细化后每行栅格的边缘坐标。
19.为达上述目的,本技术第二方面实施例提出了物料的密度测量装置,包括:第一获取模块,用于获取待测物料的三维点云信息;第二获取模块,用于获取所述待测物料的传输速度,并根据所述传输速度和所述三维点云信息,获取所述待测物料在预设时间段内的总体积;第三获取模块,用于获取所述待测物料的实时重量,并根据所述传输速度和所述实时重量,获取所述待测物料在预设时间段内的总重量;第四获取模块,用于基于所述总重量和所述总体积,获取所述待测物料的密度值。
20.根据本技术的一个实施例,所述第二获取模块,还用于:基于所述三维点云信息,获取所述待测物料任一截面的截面面积;将所述截面面积与所述传输速度相乘,获取所述待测物料的瞬时体积;对所述瞬时体积在所述预设时间段内进行积分,获取所述待测物料的所述总体积。
21.根据本技术的一个实施例,所述第二获取模块,还用于:基于所述三维点云信息,获取所述待测物料在任一截面的起点坐标、终点坐标和所述任一截面上各点的高度值;基于所述起点坐标和所述终点坐标,对所述高度值进行积分,获取所述待测物料任一截面的截面面积。
22.根据本技术的一个实施例,所述第三获取模块,还用于:获取所述待测物料的实时重量;将所述实时重量与所述传输速度相乘,获取所述待测物料的瞬时重量;对所述瞬时重量在所述预设时间段内进行积分,获取所述待测物料的所述总重量。
23.根据本技术的一个实施例,所述物料的密度测量装置还包括:照明模块,用于控制栅格照明光源对所述待测物料进行照明,其中,所述栅格照明光源用于在所述待测物料表面形成明暗条纹带。
24.根据本技术的一个实施例,所述第一获取模块,还用于:获取双目相机采集的初始
图像,并根据两个相机的所述初始图像,获取所述待测物料的视差图;基于所述视差图和相机内参和相机外参,获取所述待测物料的三维点云信息。
25.根据本技术的一个实施例,所述第一获取模块,还用于:提取两个所述初始图像中每行格栅的边缘坐标;基于两个所述初始图像中每行格栅的所述边缘坐标,获取所述待测物料的所述视差图。
26.根据本技术的一个实施例,所述第一获取模块,还用于:获取所述初始图像对应的灰度图,并对所述灰度图进行中值滤波和边缘增强,获取所述灰度图中值滤波和边缘增强后的第一图像;对所述第一图像提取光栅边缘,并进行图像二值化,获取图像二值化后的第二图像;对所述第二图像消除孤立点,并进行边缘细化,获取边缘细化后每行栅格的边缘坐标。
27.为达上述目的,本技术第三方面实施例提出了一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以实现如本技术第一方面实施例所述的物料的密度测量方法。
28.为达上述目的,本技术第四方面实施例提出了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于实现如本技术第一方面实施例所述的物料的密度测量方法。
29.为达上述目的,本技术第五方面实施例提出了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现如本技术第一方面实施例所述的物料的密度测量方法。
附图说明
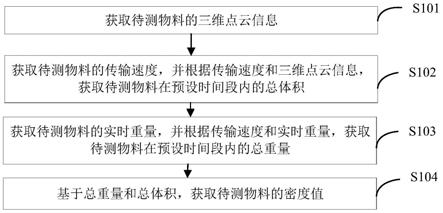
30.图1是本技术一个实施例的一种物料的密度测量方法的示意图。
31.图2是本技术一个实施例的测量物料密度的运输装置结构示意图。
32.图3是本技术一个实施例的获取待测物料在预设时间段内的总体积的示意图。
33.图4是本技术一个实施例的获取待测物料在预设时间段内的总重量的示意图。
34.图5是本技术一个实施例的获取待测物料的三维点云信息的示意图。
35.图6是本技术一个实施例的一种物料的密度测量方法的示意图。
36.图7是本技术一个实施例的一种物料的密度测量装置的示意图。
37.图8是本技术一个实施例的一种电子设备的示意图。
具体实施方式
38.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。
39.图1是本技术提出的一种物料的密度测量方法,如图1所示,该物料的密度测量方法,包括以下步骤:
40.s101,获取待测物料的三维点云信息。
41.本技术提出一种在物料运输过程中就能测量出物料的密度的方法,比如说,在煤
炭开采中,需要使用运输带将煤料运输出去,本技术提出的物料测量方法能够在煤料运输过程中就实时获得煤料密度。可选地,本技术还可应用在沙子在传输带上运输时,测量沙子的密度,或者应用在土壤在传输带上运输时,测量土壤的密度等。
42.将图像采集装置安装在运输带上方,在运输带运输待测物料的过程中,使用图像采集装置采集待测物料在运输带上的图像。可选地,图像采集装置可以是两个图像传感器(charge coupled device,ccd)相机组成的双目相机。
43.对图像采集装置采集的待测物料在运输带上的图像进行处理,获取待测物料的三维点云信息。
44.s102,获取待测物料的传输速度,并根据传输速度和三维点云信息,获取待测物料在预设时间段内的总体积。
45.获取待测物料的传输速度,并根据待测物料的三维点云信息,获得待测物料在任一个截面的面积,基于待测物料的传输速度和待测物料在任一个截面的面积,可得出待测物料的瞬时体积流量,对瞬时体积流量在预设时间段内进行积分,获取待测物料在预设时间段内的总体积。
46.可选地,获取待测物料的传输速度时,可以在运输带滚轮处安装一个速度传感器,从而实时获取待测物料的传输速度。
47.可选地,获取待测物料的传输速度时,可以对运输带预先设置一个传输速度,传输带一直按照所设置的速度进行传输,该设置速度即为待测物料的传输速度。
48.s103,获取待测物料的实时重量,并根据传输速度和实时重量,获取待测物料在预设时间段内的总重量。
49.获取待测物料的实时重量,并根据传输速度和实时重量,可得出待测物料的瞬时重量流量,对瞬时重量流量在预设时间段内进行积分,获取待测物料在预设时间段内的总重量。
50.s104,基于总重量和总体积,获取待测物料的密度值。
51.根据上述获得的待测物料在预设时间段内的总体积和待测物料在预设时间段内的总重量,结合总体积测量点与总重量测量点之间的距离,以及运输带的传输速度,获取待测物料的密度值。
52.其中,获取待测物料的密度值的计算公式为:
[0053][0054]
上式中,ρd为待测物料的密度值,t为预设时间段总长度,m为待测物料的总重量,v为待测物料的总体积。
[0055]
本技术实施例提出了一种物料的密度测量方法,通过获取待测物料的三维点云信息;获取待测物料的传输速度,并根据传输速度和三维点云信息,获取待测物料在预设时间段内的总体积;获取待测物料的实时重量,并根据传输速度和实时重量,获取待测物料在预设时间段内的总重量;基于总重量和总体积,获取待测物料的密度值。本技术在物料运输的过程中就能实时实现在线测量物料的密度,更智能化,可缩短测量时间,简化测量流程,提高测量准确率。
[0056]
作为一种可实现的方式,图2是以双目相机为例测量物料密度的运输装置结构示
意图,如图2所示,在运输带上方安装有双目相机,且安装有栅格照明光源,在测量待测物料密度时,待测物料在运输到上传输,栅格照明光源对待测物料进行照明,使得在待测物料表面形成明暗条纹带。
[0057]
图3是本技术提出的一种物料的密度测量方法,如图3所示,根据传输速度和三维点云信息,获取待测物料在预设时间段内的总体积,包括以下步骤:
[0058]
s301,基于三维点云信息,获取待测物料任一截面的截面面积。
[0059]
根据上述获得的三维点云信息,获取待测物料的任一截面,由于待测物料的任一截面在运输带侧是直线,而在物料顶侧的形状并不是规整的线段,因此确定待测物料的任一截面的起点坐标、终点坐标和任一截面上各点的高度值,并基于起点坐标和终点坐标,对高度值进行积分,获取待测物料任一截面的截面面积。
[0060]
其中,获取待测物料任一截面的截面面积的计算公式为:
[0061][0062]
上式中,s(t)为待测物料任一截面的截面面积,x0为待测物料任一截面的起点横坐标,x1为待测物料任一截面的终点横坐标,h(x)为待测物料任一截面上物料顶侧点的高度。
[0063]
其中,待测物料任一截面上物料顶侧点的高度,也可理解为物料运输时物料表面和空载时运输带表面的高度差。
[0064]
s302,将截面面积与传输速度相乘,获取待测物料的瞬时体积。
[0065]
根据待测物料的截面面积与传输速度,获取待测物料的瞬时体积。
[0066]
其中,待测物料的瞬时体积的计算公式为:
[0067]
q(t)=s(t)
·
v(t)
[0068]
上式中,q(t)为待测物料的瞬时体积,s(t)为待测物料任一截面的截面面积,v(t)为待测物料的传输速度。
[0069]
s303,对瞬时体积在预设时间段内进行积分,获取待测物料的总体积。
[0070]
对瞬时体积在预设时间段内进行积分,获取待测物料的总体积,其中,预设时间段内由实施者自行确定。
[0071]
其中,待测物料的总体积的计算公式为:
[0072][0073]
上式中,v为待测物料的总体积,t为预设时间段总长度,q(t)为待测物料的瞬时体积。
[0074]
本技术实施例根据传输速度和三维点云信息,获取待测物料在预设时间段内的总体积,方便快捷,为后续计算待测物料的密度奠定了基础。
[0075]
图4是本技术提出的一种物料的密度测量方法,如图4所示,获取待测物料的实时重量,并结合待测物料的传输速度,获取待测物料在预设时间段内的总重量,包括以下步骤:
[0076]
s401,获取待测物料的实时重量。
[0077]
如图2所示,在运输带机架上安装有电子皮带秤,电子皮带秤实时对待测物料进行称重并输出重量。
[0078]
s402,将实时重量与传输速度相乘,获取待测物料的瞬时重量。
[0079]
当待测物料经过电子皮带秤时,计量托辊检测到电子皮带秤的待测物料重量并通过杠杆作用于称重传感器,产生一个正比于运输带负荷的电压信号,速度传感器直接连在大直径测速滚筒上,提供多个脉冲,每个脉冲表示一个皮带运动单元,脉冲的频率正比于皮带速度。
[0080]
将上述获取的实时重量与传输速度相乘,获取待测物料的瞬时重量。
[0081]
s403,对瞬时重量在预设时间段内进行积分,获取待测物料的总重量。
[0082]
对瞬时重量在预设时间段内进行积分,获取待测物料的总重量,其中,预设时间段内由实施者自行确定。
[0083]
其中,待测物料的总重量的计算公式为:
[0084][0085]
上式中,m为待测物料的总重量,t为预设时间段总长度,m(t)为待测物料的瞬时重量。
[0086]
本技术实施例获取待测物料的实时重量,并结合待测物料的传输速度,获取待测物料在预设时间段内的总重量,方便快捷,为后续计算待测物料的密度奠定了基础。
[0087]
图5是本技术提出的一种物料的密度测量方法,如图5所示,获取待测物料的三维点云信息,包括以下步骤:
[0088]
s501,获取双目相机采集的初始图像,并根据两个相机的初始图像,获取待测物料的视差图。
[0089]
获取双目相机中两个相机分别采集的图像作为初始图像,对初始图像进行灰度化处理,获取初始图像对应的灰度图。获取初始图像对应的灰度图后,为了减少噪声对后续物体轮廓提取的影响,对灰度图进行平滑去噪。可选地,图像平滑可采用中值滤波的方法。对进行中值滤波后得到的图像进行边缘增强,获取灰度图进行中值滤波和边缘增强后的图像,作为第一图像。
[0090]
对上述获得的第一图像提取光栅边缘,并进行图像二值化,获取图像二值化后的第二图像。为了减少计算量,对第二图像消除孤立点,并进行边缘细化,获取边缘细化后每行栅格的边缘坐标。可选地,边缘细化可选择hilditch算法、rosenfeld算法、pavlidis算法以及基于索引表查询的细化算法等。
[0091]
将两个相机分别采集的两个初始图像中每行格栅的边缘坐标通过局部立体匹配算法进行匹配,进而获取待测物料的视差图。
[0092]
s502,基于视差图和相机内参和相机外参,获取待测物料的三维点云信息。
[0093]
对相机进行标定,获取相机内参和相机外参,可选地,标定方法可选择利用径向排列约束(radial alignment constraint,rac)标定法、直接线性变换(direct linear transform,dlt)标定法等方法。
[0094]
基于视差图和相机内参和相机外参,并根据双目视觉的三角测量原理,获取待测物料的三维点云信息。
[0095]
本技术实施例通过对双目相机采集的初始图像进行处理,并结合相机内参和相机外参,能够获取更精准的待测物料的三维点云信息,以便于后续基于三维点云信息获取待测物料的密度。
[0096]
图6是本技术提出的一种物料的密度测量方法,如图6所示,该物料的密度测量方法,包括以下步骤:
[0097]
s601,获取双目相机采集的初始图像,获取初始图像对应的灰度图,并对灰度图进行中值滤波和边缘增强,获取灰度图中值滤波和边缘增强后的第一图像。
[0098]
s602,对第一图像提取光栅边缘,并进行图像二值化,获取图像二值化后的第二图像。
[0099]
s603,对第二图像消除孤立点,并进行边缘细化,获取边缘细化后每行栅格的边缘坐标。
[0100]
关于步骤s601~s603的实现方式,可采用本技术中各实施例中的实现方式,在此不再进行赘述。
[0101]
s604,基于两个初始图像中每行格栅的边缘坐标,获取待测物料的视差图。
[0102]
s605,基于视差图和相机内参和相机外参,获取待测物料的三维点云信息。
[0103]
关于步骤s604~s605的实现方式,可采用本技术中各实施例中的实现方式,在此不再进行赘述。
[0104]
s606,基于三维点云信息,获取待测物料任一截面的截面面积。
[0105]
s607,将截面面积与传输速度相乘,获取待测物料的瞬时体积。
[0106]
s608,对瞬时体积在预设时间段内进行积分,获取待测物料的总体积。
[0107]
关于步骤s606~s608的实现方式,可采用本技术中各实施例中的实现方式,在此不再进行赘述。
[0108]
s609,获取待测物料的实时重量。
[0109]
s610,将实时重量与传输速度相乘,获取待测物料的瞬时重量。
[0110]
s611,对瞬时重量在预设时间段内进行积分,获取待测物料的总重量。
[0111]
关于步骤s609~s611的实现方式,可采用本技术中各实施例中的实现方式,在此不再进行赘述。
[0112]
s612,基于总重量和总体积,获取待测物料的密度值。
[0113]
本技术实施例提出了一种物料的密度测量方法,通过获取待测物料的三维点云信息;获取待测物料的传输速度,并根据传输速度和三维点云信息,获取待测物料在预设时间段内的总体积;获取待测物料的实时重量,并根据传输速度和实时重量,获取待测物料在预设时间段内的总重量;基于总重量和总体积,获取待测物料的密度值。本技术在物料运输的过程中就能实时实现在线测量物料的密度,更智能化,可缩短测量时间,简化测量流程,提高测量准确率。
[0114]
图7是本技术提出的一种物料的密度测量装置,如图7所示,该物料的密度测量装置700,包括第一获取模块71、第二获取模块72、第三获取模块73和第四获取模块74,其中:
[0115]
第一获取模块71,用于获取待测物料的三维点云信息。
[0116]
第二获取模块72,用于获取待测物料的传输速度,并根据传输速度和三维点云信息,获取待测物料在预设时间段内的总体积。
[0117]
第三获取模块73,用于获取待测物料的实时重量,并根据传输速度和实时重量,获取待测物料在预设时间段内的总重量。
[0118]
第四获取模块74,用于基于总重量和总体积,获取待测物料的密度值。
[0119]
进一步地,第二获取模块72,还用于:基于三维点云信息,获取待测物料任一截面的截面面积;将截面面积与传输速度相乘,获取待测物料的瞬时体积;对瞬时体积在预设时间段内进行积分,获取待测物料的总体积。
[0120]
进一步地,第二获取模块72,还用于:基于三维点云信息,获取待测物料在任一截面的起点坐标、终点坐标和任一截面上各点的高度值;基于起点坐标和终点坐标,对高度值进行积分,获取待测物料任一截面的截面面积。
[0121]
进一步地,第三获取模块73,还用于:获取待测物料的实时重量;将实时重量与传输速度相乘,获取待测物料的瞬时重量;对瞬时重量在预设时间段内进行积分,获取待测物料的总重量。
[0122]
进一步地,物料的密度测量装置还包括:照明模块75,用于控制栅格照明光源对待测物料进行照明,其中,栅格照明光源用于在待测物料表面形成明暗条纹带。
[0123]
进一步地,第一获取模块71,还用于:获取双目相机采集的初始图像,并根据两个相机的初始图像,获取待测物料的视差图;基于视差图和相机内参和相机外参,获取待测物料的三维点云信息。
[0124]
进一步地,第一获取模块71,还用于:提取两个初始图像中每行格栅的边缘坐标;基于两个初始图像中每行格栅的边缘坐标,获取待测物料的视差图。
[0125]
进一步地,第一获取模块71,还用于:获取初始图像对应的灰度图,并对灰度图进行中值滤波和边缘增强,获取灰度图中值滤波和边缘增强后的第一图像;对第一图像提取光栅边缘,并进行图像二值化,获取图像二值化后的第二图像;对第二图像消除孤立点,并进行边缘细化,获取边缘细化后每行栅格的边缘坐标。
[0126]
为了实现上述实施例,本技术实施例还提出一种电子设备800,如图8所示,该电子设备800包括:处理器801和处理器通信连接的存储器802,存储器802存储有可被至少一个处理器执行的指令,指令被至少一个处理器801执行,以实现如上述实施例所示的物料的密度测量方法。
[0127]
为了实现上述实施例,本技术实施例还提出一种存储有计算机指令的非瞬时计算机可读存储介质,其中,计算机指令用于使计算机实现如上述实施例所示的物料的密度测量方法。
[0128]
为了实现上述实施例,本技术实施例还提出一种计算机程序产品,包括计算机程序,计算机程序在被处理器执行时实现如上述实施例所示的物料的密度测量方法。
[0129]
在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0130]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者
隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0131]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0132]
尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1