一种基于捕获有效峰值判决的方法与流程
1.本发明涉及卫星信号捕获技术领域,具体的说是一种基于捕获有效峰值判决的方法。
背景技术:
2.当前存在四大已经建立或者正在发展当中的全球卫星导航系统,包括美国的gps、俄罗斯的glonass、中国的北斗三代导航系统和欧洲的galileo系统。
3.经典的全球定位接收机出于芯片设计复杂度以及成本的考虑,一般不会放太多资源用于卫星捕获。但是在城市峡谷等信号遮蔽严重的场景,导航信号变弱,导致卫星捕获性能急剧下降,捕获一颗信号强度较低的卫星通常需要数秒甚至数十秒。如果接收机能够在不增加资源的情况下,在同样灵敏度条件下提高其捕获概率,则在信号遮蔽的场景会明显增加了可用卫星,从而提高定位概率。
技术实现要素:
4.针对现有技术中存在的上述不足之处,本发明要解决的技术问题是提供一种,用于实现在等效资源消耗情况下提高捕获概率。
5.本发明为实现上述目的所采用的技术方案是:一种基于捕获有效峰值判决的方法,包括以下步骤:
6.在本轮捕获过程中,获取当前不同搜索单元的捕获结果;
7.根据所述捕获结果获取本轮的搜索峰值并计算平均底噪;
8.按照门限捕获方式进行第一捕获判决,判断当前是否存在卫星;
9.在当前存在卫星的情况下,判决捕获成功;在当前不存在卫星的情况下,将所述捕获结果做降序排列,计算降序排列后的捕获结果的峰均比;
10.根据所述峰均比进行第二捕获判决,判断捕获是否成功。
11.所述获取当前不同搜索单元的捕获结果为经过载波剥离和码剥离后的捕获,具体为:
[0012][0013]
其中,i表示同相支路的某个相位的积分结果,q表示正交支路某个相位的积分结果,m表示不同的搜索单元,且0≤m≤n-1,n表示采用的搜索单元个数。
[0014]
所述计算平均底噪,具体为:
[0015][0016]
其中,noise表示平均底噪,n表示采用的搜索单元个数,s(m)表示捕获结果。
[0017]
所述按照门限捕获方式进行第一捕获判决,判断当前是否存在卫星,具体为:
[0018]
flag=1,st(s/noise>ratio)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0019]
其中,ratio为第一预设阈值,s表示搜索峰值,noise表示平均底噪,flag表示判决
结果,即当前搜索峰值与平均底噪之比大于第一预设阈值则判断当前存在卫星,否则判断当前不存在卫星。
[0020]
所述计算降序排列后的捕获结果的峰均比,具体为计算降序排列后的捕获结果中前若干个捕获结果的峰均比。
[0021]
所述根据所述峰均比进行第二捕获判决,判断捕获是否成功,具体为:
[0022]
将所述峰均比与第二预设阈值逐一进行比对,若存在某一峰均比超过所述第一预设阈值,则判断当前捕获成功,否则判断当前捕获失败并退出当前捕获判断。
[0023]
本发明具有以下优点及有益效果:
[0024]
1、本发明能够在不增加资源的情况下,在同样灵敏度条件下提高接收机捕获概率。
[0025]
2、本发明在信号遮蔽的场景会明显增加了可用卫星,从而提高定位概率。
附图说明
[0026]
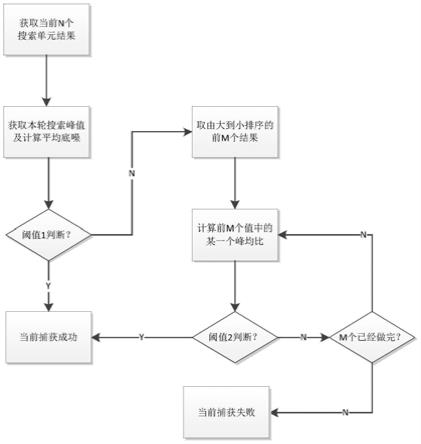
图1为本发明方法流程图;
[0027]
图2为本发明的检测概率的示意图。
具体实施方式
[0028]
下面结合附图及实施例对本发明做进一步的详细说明。
[0029]
由于正常使用的捕获过程中,较强信号(一般信号强度在39db-hz及以上)及中等强度信号(一般信号强度在27db-hz~38db之间)在前面捕获档位已经正常上星,弱信号(信号强度在26db-hz及以下)捕获时通常会有历书进行辅助判断当前位置某颗卫星是否可见,从而协助判决捕获结果是否有效。因此,本发明所述的方法主要针对弱信号,对于强信号使用的较少。
[0030]
应用本发明所述的方法,在捕获过程方面仍然采用传统方法,只是具体实现及信息提取方式上有不同。
[0031]
如图1所示,一种基于捕获有效峰值判决的方法,包括以下步骤:
[0032]
在本轮捕获过程中,获取当前不同搜索单元的捕获结果;所述获取当前不同搜索单元的捕获结果为经过载波剥离和码剥离后的捕获,具体为:
[0033][0034]
其中,i表示同相支路的某个相位的积分结果,q表示正交支路某个相位的积分结果,m表示不同的搜索单元,且0≤m≤n-1,n表示采用的搜索单元个数。
[0035]
根据所述捕获结果获取本轮的搜索峰值并计算平均底噪;搜索峰值的获取方法为:将本轮的搜索结果(通常是2046个)取出后采用冒泡法获取最大值)所述计算平均底噪,具体为:
[0036][0037]
其中,noise表示平均底噪,n表示采用的搜索单元个数,s(m)表示捕获结果。
[0038]
按照门限捕获方式进行第一捕获判决,判断当前是否存在卫星,具体为:
[0039]
flag=1,st(s/noise>ratio)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0040]
其中,ratio为第一预设阈值(根据经验及大规模测试进行设定),s表示搜索峰值,noise表示平均底噪,flag表示判决结果,即当前搜索峰值与平均底噪之比(即峰均比)大于第一预设阈值则判断当前存在卫星,否则判断当前不存在卫星。
[0041]
在当前存在卫星的情况下,判决捕获成功,当前捕获成功,进入后续流程;在当前不存在卫星的情况下(这里的不存在意味着峰均比的最大值低于第一预设阈值),将所述捕获结果做降序排列s0,s1,...,si,...,s
n-1
,第一个值最大,最后一个值最小;
[0042]
计算降序排列后的捕获结果的峰均比(即当前搜索峰值与平均底噪之比),在本发明的一个实施例中,可以为计算降序排列后的捕获结果中前若干个捕获结果的峰均比,即前m个,m<n-1。
[0043]
根据所述峰均比进行第二捕获判决,判断捕获是否成功。从s0开始逐一分别计算峰均比的值,与第二预设阈值进行比对判断,如果超过第二预设阈值则判断当前捕获成功有效,并进入后续流程,否则判断当前捕获失败并直接退出当前捕获判断。第二预设阈值也是经过经验及大规模测试设定,其值比第一预设阈值要小一些。
[0044]
对于信号检测而言,最为关心的指标是检测概率,公式(1)表示的信号可以分成两种:
[0045]
(1)含有用信号及噪声,其包络的概率密度函数(pdf)为ps(z);
[0046]
(2)不含有用信号,仅含有噪声,其包络的概率密度函数(pdf)为pn(z);
[0047]
假设检测门限是v
t
,则可以得到(如图2所示):
[0048][0049]
阈值设置过高会降低信号的捕获概率,导致上星变慢甚至无法上星。如果阈值设置过低会导致误捕概率变高,浪费芯片的跟踪通道资源和功耗。本发明的一个实施例中,采用自适应的阈值设定方法,通过设置扣除噪声基底的系数关系来设定阈值。
[0050]
下面表1和表2的测试结果为信号源条件下不同信号强度的捕获概率对比(gps信号和北斗bds信号):
[0051]
表1 gps信号的捕获对比(静态场景)
[0052][0053]
表2 bds信号的捕获对比
[0054][0055]
测试的方法示例:
[0056]
以gps l1 c/a 35db为例,使用的捕获参数是2ms积分*4次捕获,阈值1为3.5,阈值2为3.0,以某一次捕获过程为例。
[0057]
基带返回的捕获结果为捕获失败,取出所有捕获的结果,计算峰均比并降序排序,结果如表3:
[0058]
表3
[0059]
序号峰均比13.323.132.541.8
[0060]
从表3中可以得知,有两次的捕获结果的峰均比是小于阈值1且大于阈值2的,传统方法都是失败,而新方法中前2次都是可以成功的,我们取峰均比最大的捕获结果作为捕获成功的结果,即可得到捕获的结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1