基于正交扫描的激光光斑分布及PIB因子测量装置和方法与流程
基于正交扫描的激光光斑分布及pib因子测量装置和方法
技术领域
1.本发明涉及一种激光参数测量装置及使用该装置的激光参数测量方法,具体涉及一种基于正交扫描的激光光斑分布及pib因子测量装置和测量方法。
背景技术:
2.在高功率激光参数测量中,光束质量是一个重要的参数,表示激光束向远场发射的能力。常见的光束质量包括m2因子、β参数和桶中功率(pib因子)等,其中pib因子代表了激光束在远场的功率集中度和可聚焦能力。
3.在高功率激光远场pib因子测量中,通常需要测量直径为厘米级内的激光桶中功率参数。现有的pib测量方法是根据测量要求采用设定直径(比如20毫米)的光阑孔设置在光学调节架上,光阑孔后面采用光功率计探头测量光功率,通过微调光阑孔的位置使得获取的光功率的值最大,即为该激光束的pib值。这种方法存在的问题是激光的光束不稳定时,强光点的位置发生变化,导致无法采用光阑孔捕捉到激光光强最大值,故只能适用于连续输出的稳定激光器。
4.申请号为cn201710131735.1,发明名称为基于平板渐开线孔取样的激光光束质量测量装置和方法,申请号为cn201911214277.3,发明名称为一种激光远场光束质量pib因子的测量装置及测量方法,以及申请号为cn201911215439.5,发明名称为一种激光远场桶中功率分布曲线的绝对测量装置及方法,三篇专利中均公开了基于平板渐开线微孔线列实现激光光斑扫描,实现激光空间变换频率不高的激光pib因子测量及光斑空间分布测量。这些技术方案应用于测量厘米级尺度桶中功率时,渐开线排布的取样孔数量无法设置太多,否则测量机构会很庞大。但是当取样孔的数量设置较少时,由于探测器采样的频率很高,也会带来扫描转盘转动周向方向上的空间分辨率远高于径向方向上的空间分辨率,影响到pib因子准确测量和光斑图像的复原问题。
技术实现要素:
5.本发明的目的是解决在激光pib因子测量及光斑空间分布测量时,尤其在测量厘米级尺度的pib因子时,现有扫描取样方法中,由于取样孔的数量有限,且探测器采样的频率高,导致取样空间分辨率严重不对称问题,而提供一种基于正交扫描的激光光斑分布及pib因子测量装置和方法。
6.本发明的设计思路是:当采用渐开线取样孔线阵对大面积光束pib因子测量时,由于取样孔的数量有限,导致一个维度上的取样空间分辨率较低,而另外一个维度上,由于采用重叠取样方式,且配备有时间响应较快的探测器和高频数据采集系统,故取样空间分辨率较高,导致会出现转盘径向和周向两个维度上取样的空间分辨严重不对称,影响到光斑功率最高强点的捕获以及后续的光斑图像复原。如果将现有的单一扫描盘改为两只正交扫描方式的扫描盘对光斑交替扫描取样,就可以获取两个维度上比较均匀的空间分辨率,后续可将两幅扫描图像合并为一幅图像进行融合处理,实现光斑的高分辨测量,同时实现光
斑最强功率点的捕捉,测量得到pib因子。
7.为达到上述目的,本发明采用的技术方案为:
8.一种基于正交扫描的激光光斑分布及pib因子测量装置,其特殊之处在于:包括测量光阑1、探测器2、支撑4、数据采集系统、设置在测量光阑1和探测器2之间的第一扫描盘11和第二扫描盘21以及机架;
9.所述支撑4安装在机架上,支撑4上通过轴承安装有第一转轴13和第二转轴23,并通过轴承限位;
10.所述第一扫描盘11和第二扫描盘22分别安装在第一转轴(13)和第二转轴(23)上,可在第一转轴13和第二转轴23带动下转动;
11.所述第一转轴13和测量光阑1中心之间的连线与所述第二转轴23和测量光阑1中心之间的连线垂直且距离相等;
12.所述第一扫描盘11上设置有一组呈渐开线均匀间隔排布且直径相同的第一取样孔12,所述第一取样孔12的孔径小于测量光阑1的直径,且相邻两只第一取样孔12中心线的间距大于测量光阑1的直径;
13.所述第二扫描盘21上设置有一组呈渐开线均匀间隔排布且直径相同的第二取样孔22;所述第二取样孔22的孔径小于测量光阑1的直径,且相邻两只第二取样孔22中心线的间距大于测量光阑1的直径;
14.所述第一扫描盘11和第二扫描盘21上渐开线的轨迹相同、第一取样孔12之间的间距和第二取样孔22之间的间距相同、第一取样孔12与第二取样孔22的孔径相同;
15.所述第一转轴13和第二转轴23通过同步传动单元驱动;
16.待测量激光束8入射至测量光阑1,经第一扫描盘11和第二扫描盘21上的第一取样孔12和第二取样孔22分时交错扫描后入射至探测器2,所述数据采集处理单元记录并处理探测器2的输出信号,计算得到激光的激光光斑分布及pib因子。
17.进一步地,还包括位置触发单元,位置触发单元包括在第一扫描盘11和第二扫描盘22的边沿处分别设置的第一定位狭缝15和第二定位狭缝25,以及在机架上设置的第一同步开关14和第二同步开关24;
18.所述第一定位狭缝15和第一同步开关14相配合,第二定位狭缝25和第二同步开关24相配合,用于触发数据采集系统,为待测量激光束8光强分布的图像复原提供位置基准信号。
19.进一步地,所述同步传动单元为同步带传动驱动装置,包括电机3、第一同步带轮16、第二同步带轮26和同步带5;所述第一同步带轮16、第二同步带轮26分别设置在第一转轴13和第二转轴23上,同步带5联接在第一同步带轮16、第二同步带轮26之间;所述电机3的输出端与第一转轴13或第二转轴23相联。
20.进一步地,所述同步传动单元为齿轮传动驱动装置,包括电机3、第三转轴7、第一齿轮17、第二齿轮27、第三齿轮18和第四齿轮28;所述第三齿轮18和第四齿轮28同时设置在第三转轴7上,第一齿轮17和第二齿轮27分别设置在第一转轴13和第二转轴23上;
21.所述电机3的输出端与第三转轴7相联,用于驱动第三转轴7转动,使得第三齿轮18和第四齿轮28分别驱动与其相互啮合的第一齿轮17和第二齿轮27,进而驱动第一转轴13和第二转轴23同步转动。
22.进一步地,所述第一扫描盘11和第二扫描盘22为扇形结构,扇形的角度不小于180
°
;
23.所述第一扫描盘11或第二扫描盘22上的取样孔为6-15只。
24.进一步地,定义第一扫描盘11的半径为r1和第二扫描盘22的半径为r2,所述r1、r2相互之间满足以下关系:r1=r2。
25.进一步地,所述第一转轴13和第二转轴23的转动速率为1000-5000rpm。
26.进一步地,所述的探测器2的口径大于测量光阑1的通孔,响应时间为纳秒或微秒级。
27.进一步地,所述测量光阑1的直径为30-100mm,第一取样孔12和第二取样孔22的直径为5-30mm。
28.本发明还提供了一种基于正交扫描的激光光斑分布及pib因子测量方法,利用上述基于正交扫描的激光光斑分布及pib因子测量装置,其特殊之处在于,包括以下步骤:
29.1)调节光路,实现正交扫描取样
30.使待测量激光束8入射至测量光阑1,光斑中心对准测量光阑的中心,依次经过第一扫描盘11和第二扫描盘21上独立设置的呈渐开线均匀间隔排布且直径相同的第一取样孔12和第二取样孔22调制后,入射至探测器2;
31.所述第一取样孔12和第二取样孔22的孔径小于测量光阑1的直径,且相邻两只取样孔中心线的间距大于测量光阑1的直径;所述第一转轴13和测量光阑1中心之间的连线与所述第二转轴13和测量光阑13中心之间的连线垂直且距离相等;
32.2)探测器2对穿过每只取样孔的待测量激光束8进行取样测量,获取激光束在不同取样孔位置处的功率值;
33.3)数据采集处理单元记录并处理探测器2在一个扫描周期内的系列激光功率值,根据采集时间与第一扫描盘11和第二扫描盘21转动时取样孔的位置关系,获得该时段内的pib因子值,并复原得到激光的光斑分布。
34.与现有技术相比,本发明具有的有益技术效果如下:
35.1、本发明针对大光斑激光的光束质量pib因子测量,提出了一种基于正交扫描的激光光斑分布及pib因子测量装置和方法。本发明采用正交排布的两组渐开线阵列取样孔分时同步扫描激光光斑,克服现有因测量光斑和取样孔较大而导致的取样孔数量较少带来的某一维空间分辨率较差的问题。能够从两个维度上获取比较均匀的空间分辨率,最终实现光斑最强功率点的捕捉,测量得到较准确的pib因子,同时还可以将两幅扫描图像合并为一幅图像进行融合处理,实现光斑的高分辨测量。
36.2、本发明基于正交扫描的激光光斑分布及pib因子测量装置和方法,通过在两只扫描盘上分别设置同步开关,由此准确获得每只取样孔与入射激光的位置,从而为后续的光斑图像复原提供了基准。
37.3、本发明基于正交扫描的激光光斑分布及pib因子测量装置,采用同步带或齿轮传动单元驱动两只转轴的同步转动,实施中按照设定的位置将两只扫描盘在空间上交错布放后,按照相同的转速同步转动,实现了光斑的分时交错扫描取样,提高了系统的可靠性。
附图说明
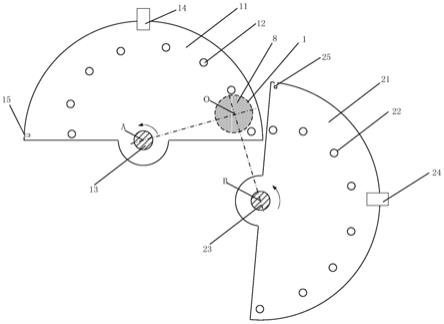
38.图1为本发明基于正交扫描的激光光斑分布及pib因子测量装置实施例原理示意图;
39.图2为本发明基于正交扫描的激光光斑分布及pib因子测量装置实施例第一扫描盘对激光光斑扫描取样原理示意图;
40.图3为本发明基于正交扫描的激光光斑分布及pib因子测量装置实施例第二扫描盘对激光光斑扫描取样原理示意图;
41.图4为本发明基于正交扫描的激光光斑分布及pib因子测量装置实施例两只扫描盘对激光光斑正交扫描原理示意图;
42.图5为本发明基于正交扫描的激光光斑分布及pib因子测量装置实施例同步带轮驱动的测量装置结构示意图;
43.图6为本发明基于正交扫描的激光光斑分布及pib因子测量装置实施例齿轮驱动的测量装置结构示意图;
44.附图标记:
45.1-测量光阑,2-探测器,3-电机,4-支撑,5-同步带,7-第三转轴,8-待测量激光束,11-第一扫描盘,12-第一取样孔,13-第一转轴,14-第一同步开关,15-第一定位狭缝,16-第一同步带轮,17-第一齿轮,18-第三齿轮,21-第二扫描盘,22-第二取样孔,23-第二转轴,24-第二同步开关,25-第二定位狭缝,26-第二同步带轮,27-第二齿轮,28-第四齿轮。
具体实施方式
46.为使本发明的目的、优点和特征更加清楚,以下结合附图和具体实施例对本发明提出的基于正交扫描的激光光斑分布及pib因子测量装置和方法作进一步详细说明。本领域技术人员应当理解的是,这些实施方式仅仅用来解释本发明的技术原理,目的并不是用来限制本发明的保护范围。
47.如图1-4所示,本发明的基于正交扫描的激光光斑分布及pib因子测量装置,包括测量光阑1、探测器2、设置在测量光阑1和探测器2之间的第一扫描盘11和第二扫描盘22以及记录并处理探测器2输出信号的数据采集系统;第一扫描盘11和第二扫描盘22分别绕第一转轴13和第二转轴23高速同步转动。
48.其中第一扫描盘11上设置有一组渐开线排布的第一取样孔12,第一取样孔12的孔径小于测量光阑1的直径,且相邻两只第一取样孔12中心线的间距大于测量光阑1的直径。第二扫描盘21上设置有一组渐开线排布的第二取样孔22,第二取样孔22的孔径小于测量光阑1的直径,且相邻两只第二取样孔22中心线的间距大于测量光阑1的直径。
49.第一扫描盘11和第二扫描盘21上渐开线的轨迹相同、第一取样孔12之间的间距和第二取样孔22之间的间距相同、第一取样孔12与第二取样孔22的孔径相同;
50.定义第一扫描盘11的半径为r1、第二扫描盘22的半径为r2、第一转轴13和第二转轴23之间的距离为l,半径是指第一扫描盘圆心到第一扫描盘轮廓的距离,所述r1、r2、l相互之间满足以下关系:r1=r2,第一扫描盘11和第二扫描盘22垂直时,
51.渐开线均以所在的转轴为参考,取样孔设置时要求最外部的取样孔和最内部的取样孔能扫描到测量光阑1通孔的边沿,实现整个光斑的扫描取样。其中测量光阑1的直径为
30-100mm,第一取样孔12和第二取样孔22的直径为5-30mm。探测器2的口径大于测量光阑1的通孔,响应时间为纳秒或微秒级,优选积分球光电探测器。
52.测量时,将待测量激光束8的功率最强点入射至测量光阑1内,在每组扫描时取样孔实测最大值代表着桶中功率的最大值,也就是pib因子,此外还可以对采集的数据处理得到测量光阑1内的光斑图像,以上要求与基于渐开线扫描pib测量原理系统相一致。
53.如图1所示,本实施例中第一扫描盘11和第二扫描盘22为在空间交错排布的扇形盘,确保在任意时刻最多只有一只取样孔对光斑进行取样,其中扇形盘的扇形角不小于180
°
,比如为240
°
,尽可能排布更多的取样孔。同时还需要在扇形盘上合适的位置设置配重块,确保转动中的动态平衡。
54.为实现正交扫描取样,第一转轴13和测量光阑1中心之间的连线与第二转轴23和测量光阑1中心之间的连线垂直且距离相等。
55.测量时,使待测量激光束8入射至测量光阑1,经第一扫描盘11和第二扫描盘21分时交错扫描后入射至探测器2,数据采集处理单元记录并处理探测器2的输出信号,计算得到激光的光束质量pib因子,并根据取样数据复原得到光斑的图像。
56.第一扫描盘11和第二扫描盘22的相对位置是固定的,并同步转动,第一扫描盘11对光斑取样完毕后,紧接着第二扫描盘22进行取样,从时序上讲,可以有未扫描的间隙,但不能出现两只扫描盘的取样孔都在同时扫描。前后两次取样完毕后的数据融合为一组数据,并复原处理为一帧图像,通常第一转轴13和第二转轴23的转动速率为1000-5000rpm,对于缓变的高功率激光而言,可认为在前后两次扫描取样中光斑的形态变化可忽略。
57.图2和图3分别给出了第一扫描盘11和第二扫描盘22对光斑进行扫描取样的原理,可以看出如果采用单独的一个扫描盘时,由于待测量的光斑直径大,而相邻取样孔的间距要大于光阑孔的直径,以确保不会同时出现两只取样孔对光斑进行取样,导致在每个扫描盘上的取样孔数量有限,通常取样孔为6-15只,沿转轴径向方向上的取样的空间分辨率不高,而另一个维度上,也就是转轴转动的周向方向上可通过高速数据采集系统的重叠采样,获取较高的空间分辨率,由此影响到后续的光斑图像复原显示以及pib因子的准确测量。
58.图4给出了采用分时正交扫描方法时取样孔的扫描轨迹线,很显然结合图2和图3的原理可知,通过高速数据采集系统的对两组扫描时的重叠采样,可以确保两个维度上均获取较高的空间分辨率。图4中a为第一转轴13中心,b为第二转轴23中心,o为测量光阑1中心,为了实现正交扫描取样,要求第一转轴13和测量光阑1中心之间的连线与所述的第二转轴13和测量光阑1中心之间的连线垂直且距离相等,也就是ao在空间上垂直于bo,且ao的长度等于bo的长度,则可以保证两个维度上均能获取较高的空间分辨率,精细描绘出光强的空间分布变化,并确保取样孔可以扫描到最强点的光束位置,也就是说,通过精细的空间扫描可确保每个扫描周期捕获到最大的功率峰值即焦斑中心,满足pib因子的测量,通过对两次扫描光斑的数据融合还可以准确复原得到光斑的图像。
59.图5给出了采用同步带传动单元驱动时的扫描装置原理图,图中第一转轴13和第二转轴23通过轴承限位在支撑4上,支撑4和测量光阑1、探测器2设置在机架上(图中未画出)。其中同步带传动单元包括电机3、第一同步带轮16、第二同步带轮26和同步带5,所述的第一同步带轮16、第二同步带轮26分别设置在第一转轴13和第二转轴23上,同步带5联接在第一同步带轮16、第二同步带轮26之间,电机3可以设置在第二转轴23或第一转轴13上,通
过联轴器与第二转轴23或第一转轴13相联。同步带5拟采用齿形同步带,转动时不打滑,确保二维扫描的同步性。
60.图6给出了采用齿轮传动单元驱动时的扫描装置原理图,其中齿轮传动单元包括电机3、第三转轴7、第一齿轮17、第二齿轮27、第三齿轮18和第四齿轮28;所述的第三齿轮18和第四齿轮28前后设置在第三转轴7上,第一齿轮17和第二齿轮27分别设置在第一转轴13和第二转轴23上,电机3驱动第三转轴7转动,使得第三齿轮18和第四齿轮28分别驱动配对的第一齿轮17和第二齿轮27,进而驱动第一转轴13和第二转轴23同步转动。优选第一齿轮17、第二齿轮27、第三齿轮18和第四齿轮28的齿数和直径均相同,可以确保同步转动。
61.如图1和图5、图6所示,为了给扫描取样机构提供位置基准,在测量装置上设置有位置触发单元,在两只扫描盘转到设定位置时触发单元输出触发信号,同步触发数据采集系统或者是由数据采集系统采集该触发信号,用于后续光束光强分布的图像复原。第一扫描盘11和第二扫描盘22的边沿处分别设置有第一定位狭缝15和第二定位狭缝25,并与机架上设置的第一同步开关14和第二同步开关24位置相匹配,同步开关可以采用常规的红外对管,红外对管安装在机架上,当扫描盘转动至狭缝的位置时,红外对管产生信号跳变,进而可以判断出此时扫描孔所在的位置,可为后续的图像复原软件提供位置基准信号。
62.基于正交扫描取样的激光光斑分布及pib因子测量方法,包括以下步骤:
63.【1】光路调节:按照如图1所示的光路,将待测量激光束8入射至测量光阑1,光斑中心尽可能对准测量光阑1的中心;
64.【2】开启转动机构,等扫描盘转速平稳且达到设定的转速后,开启光电探测器2及数据采集处理单元;
65.【3】加载待测量激光束,探测器2对穿过每只取样孔的待测量激光束进行高速取样测量,获取待测量激光束在不同取样位置处的功率值;数据采集处理单元记录并处理探测器2在一个扫描周期内的系列光功率值,计算得到每个光束扫描周期内的最大光强值,即为该时段内的pib因子值;并根据采集时间与第一扫描盘11和第二扫描盘21转动时取样孔的位置关系,复原得到激光的光斑分布。
66.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1