动热源式双轴微机械角速度传感器及其加工方法
1.本发明属于利用哥氏力偏转全方位振子检测运动体角速度姿态参数的技术领域,尤其是涉及动热源式双轴微机械角速度传感器及其加工方法,属于惯性测量领域。
背景技术:
2.利用微机电系统mems(micro-electro-mechanical-system)技术制作的微型惯性传感器有大批量生产、成本低、体积小、功耗低等诸多优点,是未来中、低精度微型惯性传感器的理想产品。陀螺、加速度计是载体运动姿态测量和控制的核心惯性传感器,而陀螺是敏感角速度、角加速度等角参数的传感器。目前,市场对微型陀螺适应恶劣苛刻的环境能力要求越来越高,而微型流体惯性传感器(mems惯性传感器)以其超高抗冲击能力和超低制造成本在mems传感器中独树一帜,是其它mems惯性传感器无法媲美的。
3.目前基于mems技术的微型流体陀螺大致可以分为四类大类:微型射流陀螺,ecf(electro-conjugate fluid)流体陀螺、微型热对流陀螺和微型热流陀螺。中国专利:一种微型四通道循环流式三轴硅射流陀螺(专利申请号:201510385582.4),属于微型射流陀螺,其敏感元件内的压电片增加了加工难度和成本,且在保持流速的前提下其体积难以进一步缩小。ecf流体陀螺的体积较大(40mm
×
60mm
×
7mm),且液体形成喷射流需高达上千伏的电压,故而ecf陀螺很难实现大批量、低成本的商业化。微型热对流陀螺无重力场就无法工作,灵敏度低。上述微型流体陀螺因其各自固有的缺点使其难以成为低成本商业化微型陀螺的选择。微型热流陀螺(也称热膨胀陀螺)是近几年提出的一种比较新的微型流体陀螺,敏感元件内无压电片,不需要高电压,可以在无重力环境下使用。与微型热流加速度计(mems热流加速度计)已经商业化相比,mems热流陀螺尚未成熟,仍处于研发阶段。mems热流陀螺难以实用化的难点在于灵敏度较微机械振动陀螺低。在中国专利201410140298.6和201210130318.2中,微机械热流陀螺几乎都是利用加热器产生热膨胀流在输入角速度的时在哥式力作用下发生偏转,通过设置对称的热敏电阻检测温度场的不对称分布。由于热气流速度很小,气流偏转时造成的不对称温度场梯度很小,因此由热敏电阻构成的惠斯登电桥输出的不平衡电压小,传感器的灵敏度低。在现有的解决方案,虽然可以通过加大加热器功率的方法提高灵敏度,但是受到功耗的限制,灵敏度没有实质性的改变和提高,很难突破这一实用化的瓶颈。
技术实现要素:
4.本发明的目的在于提供一种动热源式双轴微机械角速度传感器,以解决现有技术中存在的技术问题。
5.为了实现上述目的,本发明采用以下技术方案:
6.本发明提供一种动热源式双轴微机械角速度传感器,包括基底层、敏感层和盖板,其中,
7.所述敏感层含有中间加热腔和中间检测腔,敏感层的上表面设置有全方位振子加
热器(动热源)和两对热敏电阻;
8.定义所述敏感层上表面长度方向放置方向为x方向,宽度为y方向,高度方向为z向;两对所述热敏电阻的放置方向为x方向和y方向,且每对热敏电阻相互平行,用于检测x轴和y轴的角速度;
9.所述全方位振子加热器(动热源)采用风火轮式敏感结构,其中心含有一个带圆形的质量块的中心轮轱,通过六个完全对称的半圆形也叫支撑梁悬置在敏感层的中心位置;其下方是圆形的中间加热腔;
10.所述全方位振子加热器(动热源)除了能沿着垂直于敏感层的z轴摆动外,也能沿着敏感层所在xoy平面内的任一方位角摆动;
11.所述全方位振子加热器的两端沿着y方向覆盖对称的电极,形成可动电阻式热源;
12.所述热敏电阻含有检测x轴角速度的一对热敏电阻和检测y轴角速度的一对热敏电阻,热敏电阻的下方是矩形的中间检测腔;
13.检测x轴角速度的一对热敏电阻沿y轴方向对称放置,且与x轴方向垂直;检测y轴角速度的一对热敏电阻沿x轴方向对称放置,且与y轴方向垂直;
14.全方位振子加热器的通电方式为周期式交流电,产生交变激励电压;热敏电阻的通电方式为恒流电;
15.所述盖板上刻蚀有凹槽,且与敏感层的上表面密闭连接。
16.盖板和基底层将中间加热腔和中间检测腔的气体介质与外界隔离,形成一个密封的工作系统;中间加热腔和中间检测腔高度与上密封层中凹槽的深度为总的腔体高度z,300μm≤z≤1000μm;
17.作为一种进一步的技术方案,所述盖板的凹槽深度为盖板高度的2/3。
18.作为一种进一步的技术方案,所述全方位振子加热器和热敏电阻的高度为100nm至1000nm。
19.作为一种进一步的技术方案,所述两对热敏电阻的长度一致,均为整个敏感层宽度的1/6至1/5。
20.作为一种进一步的技术方案,所述加热器和热敏电阻均是由铬黏附层和铂层组成的金属层构成。
21.一种加工动热源式双轴微机械角速度传感器的方法,具体工艺流程如下:
22.步骤一:在n型(100)单晶硅片上热氧化0.5μm厚二氧化硅膜;
23.步骤二:二氧化硅膜上光刻形成全方位振子加热器和热敏电阻结构图形;
24.步骤三:用磁控溅射工艺在光刻胶、二氧化硅上依次溅射由铬黏附层和铂层组成的金属层;
25.步骤四:采用超声剥离工艺剥离掉全方位振子加热器和热敏电阻结构图形以外的金属层,形成全方位振子加热器和热敏电阻结构;
26.步骤五:采用光刻和湿法腐蚀工艺,腐蚀掉一部分二氧化硅;
27.步骤六:采用硅刻蚀工艺腐蚀加工形成深300μm的凹槽,使全方位振子加热器和热敏电阻通过二氧化硅膜悬空固定在敏感层上,完成陀螺敏感层的加工;
28.步骤七:将通过键合工艺将盖板和敏感层进行粘合,使敏感层的上表面处于密闭腔体里完成陀螺敏感元件的加工,形成动热源式双轴微机械角速度传感器。
29.采用上述技术方案,本发明具有如下有益效果:
30.1.这种动热源式双轴微机械角速度传感器继承了mems热流陀螺的优点,体积小,重量轻,易于智能化和集成化。
31.2.这种陀螺的敏感结构是中间的全方位振子加热器(动热源)。全方位振子除了能沿着垂直于旋转平面的z轴振动外,它在旋转平面上任一方位角上都有惯性力的自由度。该敏感结构通过六个完全对称的半圆形支撑梁悬置在敏感层的中心位置,能够敏感旋转轴(敏感轴)在xoy平面内沿x轴或y轴的任一方位角的输入角速度,从而实现双轴角速度的测量,灵敏度高,响应速度快。
32.3.这种全方位振子采用风火轮式敏感结构,中心轮轱是一个质量块,也是一个加热器,它通过多个完全对称的高弹性半圆形支撑梁悬空在振子所在平面。这种风火轮式的敏感结构有如下优点:采用敏感结构中心支撑,结构应力小;具有高的结构对称性,能够实现方位角检测的一致性;风火轮式的敏感结构可实现在小面积内制作相对长的弹性元件和比较大的质量块,从而获得大的惯性力灵敏度。
33.4.敏感元件是在一块硅片上通过光刻、腐蚀等工艺制作,一致性好,便于引入微机嵌入式系统(单片机),进行温度补偿和非线性度补偿,不仅可以提高传感器的性能,而且可实现批量生产。
34.5.具有结构和加工工艺非常简单,成本极低,可靠性高,优秀的抗振动和冲击特性,使得其与电容式微机械振动陀螺竞争中、低精度、低价格的微型陀螺市场成为可能。
附图说明
35.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
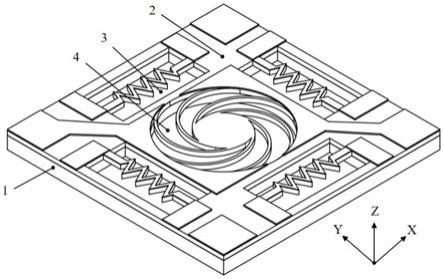
36.图1为本发明实施例提供的敏感层的三维结构示意图;
37.图2为本发明实施例提供的盖板的三维结构示意图;
38.图3为本发明实施例提供的敏感层的俯视图;
39.图4为图3的a-a向剖视图;
40.图5为本发明实施例提供的工作原理图;
41.图6为本发明实施例提供的输出电路原理图;
42.图7为本发明实施例提供的动热源式双轴微机械角速度传感器的制备工艺流程图;
43.图标:1-基底层、2-敏感层、3-中间检测腔、4-中间加热腔、5-盖板、6-凹槽、7-全方位振子加热器、8-热敏电阻、9-热敏电阻、10-热敏电阻、11-热敏电阻、12-金属电极。
具体实施方式
44.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
45.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
46.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
47.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
48.结合图1-4所示,本实施例提供一种动热源式双轴微机械角速度传感器,包括基底1、敏感层2和盖板5,其中,
49.所述敏感层2的含有中间加热腔4和中间检测腔3,敏感层的上表面设置有全方位振子加热器7和两对热敏电阻;
50.定义所述敏感层上表面长度方向放置方向为x方向,宽度为y方向,高度方向为z向;所述两对热敏电阻的放置方向为x方向和y方向,且每对热敏电阻相互平行,用于检测x轴和y轴的角速度;
51.所述全方位振子加热器7采用风火轮式敏感结构,其中心含有一个带圆形的质量块的中心轮轱,通过六个完全对称的半圆形支撑梁悬置在敏感层的中心位置;其下方是圆形的中间加热腔4;
52.所述全方位振子加热器7除了能沿着垂直于敏感层的z轴摆动外,也能沿着敏感层所在xoy平面内的任一方位角摆动。
53.所述全方位振子加热器的两端沿着y方向覆盖对称的金属电极12,形成可动电阻式热源;
54.所述热敏电阻含有检测x轴角速度的一对热敏电阻(热敏电阻8和热敏电阻10)和检测y轴角速度的一对热敏电阻(热敏电阻9和热敏电阻11),热敏电阻的下方是矩形的中间检测腔3;
55.检测x轴角速度的热敏电阻8和热敏电阻10平行放置于敏感层上表面y方向的两侧,检测y轴角速度的热敏电阻9和热敏电阻11平行放置于敏感层上表面x方向的两侧;
56.全方位振子加热器7的通电方式为周期式交流电,产生交变激励电压;热敏电阻的通电方式为恒流电;
57.所述盖板5上刻蚀有凹槽6,且与敏感层2的上表面密闭连接;
58.在该实施例中,作为一种进一步的技术方案,全方位振子加热器7除了能能够敏感旋转轴(敏感轴)在xoy平面内沿x轴或y轴任一方位角的的输入角速度,从而实现双轴角速度的测量。
59.在该实施例中,作为一种进一步的技术方案,全方位振子加热器7由交变激励电压驱动,产生交变的温度场,振子将沿其轴向和厚度方向产生交变热应力,同时,振子通电产
生焦耳热,向周围气体释放热量,进行热扩散,形成热流。当交流激励信号频率与振子沿着x轴(y轴)方向振动频率一致时,振子在x轴(y轴)方向发生谐振,产生位移,带动热流在x轴(y轴)方向流动。
60.结合图5所示,传感器的工作分为两种情况。当在x轴方向输入角速度ω
x
,由于哥氏力原理(coriolis force),全方位振子加热器7将会在yox面内向y轴方向的热敏电阻8或热敏电阻10偏转,热的振子偏向的热敏电阻的温度高于和它平行的热敏电阻,因此两相对平行的热敏电阻8和热敏电阻10产生与输入角速度ω
x
成正比的温差。热敏电阻8和热敏电阻10连接成两个惠斯登电桥的两个等臂,如图6所示。当在y轴方向输入角速度ωy,由于哥氏力原理(coriolis force),全方位振子加热器7将会在yox面内向x轴方向的热敏电阻9或热敏电阻11偏转,热的振子偏向的热敏电阻温度高于和它平行的热敏电阻,因此两相对平行的热敏电阻9和热敏电阻11产生与输入角速度ωy成正比的温差。图中tx1对应热敏电阻9,tx2对应热敏电阻11,ty1对应热敏电阻8,ty2对应热敏电阻10。
61.热敏电阻9和热敏电阻11连接成两个惠斯登电桥的两个等臂,如图6所示。输入角速度产生的温差,通过图6所示的惠斯登电桥桥臂阻值的改变转化为与角速度ω
x
或者ωy成正比的不平衡电压v
x
或者vy的输出,从而敏感x或y方向上的角速度,即构成一个动热源式双轴微机械角速度传感器。
62.在该实施例中,作为一种进一步的技术方案,盖板5和基底层1将中间加热腔4和中间检测腔3的气体介质与外界隔离,形成一个密封的工作系统;中间加热腔4和中间检测腔3高度与上密封层中凹槽6的深度为总的腔体高度z,300μm≤z≤1000μm;该实施例中的总的腔体高度为百微米量级,可以有效抑制腔体内气体流的自然对流运动,从而可以大大降低z轴加速度对传感器性能的影响。根据对陀螺性能的要求,总的腔体高度可以在300微米至1000微米的范围内任意选择,例如以上实施例中的总的腔体高度可以为700微米。
63.在该实施例中,作为一种进一步的技术方案,为增加盖板凹槽的深度可增加气体流动的空间,从而增加传感器的灵敏度,所述凹槽6深度为盖板5高度的2/3。
64.在该实施例中,作为一种进一步的技术方案,为形成阻值随温度变化小,更加稳定可靠的薄膜电阻,所述敏感层上表面的所述加热器和热敏电阻的高度为100nm至1000nm。
65.在该实施例中,作为一种进一步的技术方案,为增加传感器的稳定性和抗冲击能力,所述两对热敏电阻的长度一致,均为整个敏感层宽度的1/6至1/5。
66.在该实施例中,作为一种进一步的技术方案,所述加热器和热敏电阻均是由铬黏附层和铂层组成的金属层构成。
67.结合图7所示,本发明所公开的动热源式双轴微机械角速度传感器,其制作工艺流程如下:
68.步骤(a):在n型(100)单晶硅片上热氧化0.5μm厚二氧化硅膜,如图7(a)所示。
69.步骤(b):二氧化硅膜上光刻形成全方位振子加热器和热敏电阻结构图形,如图7(b)所示。
70.步骤(c):用磁控溅射工艺在光刻胶、二氧化硅上依次溅射由铬黏附层和铂层组成的金属层,如图7(c)所示。
71.步骤(d):采用超声剥离工艺剥离掉全方位振子加热器和热敏电阻结构图形以外的金属层,如图7(d)所示,形成全方位振子加热器和热敏电阻结构。
72.步骤(e):采用光刻和湿法腐蚀工艺,腐蚀掉一部分二氧化硅,如图7(e)所示。
73.步骤(f):采用硅刻蚀工艺腐蚀加工形成深300μm的凹槽,使全方位振子加热器和热敏电阻通过二氧化硅膜悬空固定在敏感层上,完成陀螺敏感层的加工,如图7(f)所示。
74.步骤(g):将通过键合工艺将盖板和敏感层进行粘合,使敏感层的上表面处于密闭腔体里完成陀螺敏感元件的加工,形成动热源式双轴微机械角速度传感器。
75.综上所述,本发明打破以往对热流陀螺研究的固有模式,提出一种动热源式双轴微机械角速度传感器,让有很高温度梯度的加热器动起来,让它受到惯性力的作用发生偏转在热敏电阻处形成大的温度梯度,从而实现大灵敏度的输出。这种全方位振子加热器(动热源)通过六个完全对称的半圆形支撑梁悬置在敏感层的中心位置,可实现双轴角速度测量,灵敏度高,响应速度快。风火轮式的敏感结构具有高的结构对称性,结构应力小,可保证方位角检测的一致性。该结构可实现在小面积内制作相对长的弹性元件和比较大的质量块,从而获得大的惯性力灵敏度。敏感元件是在一块硅片上通过光刻、腐蚀等工艺制作,一致性好,便于引入微机嵌入式系统(单片机),进行温度补偿和非线性度补偿,不仅可以提高传感器的性能,而且可实现批量生产。这种动热源式双轴微机械角速度传感器不仅继承了mems热流陀螺的优点,而且具有结构简单、体积小、重量轻、易于智能化和集成化等特点,符合传感器朝着微小型、综合型和智能型的发展方向。同时它具有结构和加工工艺非常简单,成本极低,可靠性高,优秀的抗振动和冲击特性,使得其与电容式微机械振动陀螺竞争中、低精度、低价格的微型陀螺市场成为可能。
76.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1